AeroVerse: UAV-Agent Benchmark Suite for Simulating, Pre-training, Finetuning, and Evaluating Aerospace Embodied World Models

0

Sign in to get full access
Overview
- Proposes a new benchmark suite called "AeroVerse" for simulating, pre-training, fine-tuning, and evaluating aerospace embodied world models using UAV (Unmanned Aerial Vehicle) agents.
- AeroVerse aims to advance research in Aerospace Embodied Intelligence and Aerospace Embodied World Models.
- Key features include a diverse set of tasks, realistic physics simulation, and customizable environments to assess the capabilities of UAV-Agent and Visual-Language models.
Plain English Explanation
The paper introduces a new benchmark called AeroVerse that is designed to help researchers and developers test and improve AI systems for controlling unmanned aerial vehicles (UAVs) or drones. The goal is to create a realistic simulated environment where these AI agents, or "UAV-Agents," can learn to navigate, perceive their surroundings, and complete various tasks.
The key idea is to provide a standardized set of challenges and scenarios that these AI models can be trained and evaluated on. This allows researchers to assess the capabilities of different AI approaches, from visual-language models that can understand and respond to natural language instructions, to more autonomous "embodied world models" that can navigate and make decisions on their own.
By using a realistic physics simulation and customizable environments, AeroVerse aims to bridge the gap between the virtual and physical worlds, helping to develop AI systems that can successfully operate in real-world aerospace applications.
Technical Explanation
The paper outlines the key features and design principles of the AeroVerse benchmark:
-
Diverse Task Suite: AeroVerse includes a variety of tasks that cover perception, navigation, and control challenges for UAV-Agents, such as object detection, semantic segmentation, target tracking, collision avoidance, and autonomous flight.
-
Realistic Physics Simulation: The benchmark is built on top of a physics engine that accurately models the dynamics and aerodynamics of UAVs, enabling the training and evaluation of agents in a realistic virtual environment.
-
Customizable Environments: AeroVerse provides a set of customizable 3D environments representing various aerospace scenarios, from urban cityscapes to natural landscapes, allowing researchers to tailor the benchmark to their specific needs.
-
Multi-Modal Sensory Input: UAV-Agents in AeroVerse have access to a range of sensory inputs, including RGB cameras, depth sensors, IMUs, and GPS, mirroring the capabilities of real-world UAVs.
-
Benchmarking Protocols: The paper defines standardized protocols for pre-training, fine-tuning, and evaluating UAV-Agents on the AeroVerse tasks, enabling consistent and comparable results across different research teams and models.
The authors demonstrate the utility of AeroVerse by benchmarking the performance of several state-of-the-art visual-language models and embodied world models on the task suite, providing a baseline for future research in this area.
Critical Analysis
The authors have made a strong case for the need to develop more capable and versatile AI agents for aerospace applications, highlighting the potential of embodied world models and visual-language models to address this challenge. The AeroVerse benchmark provides a well-designed and comprehensive platform for researchers to test and improve these types of AI systems.
One potential limitation of the benchmark is the reliance on simulation, which may not fully capture the complexities and uncertainties of the real-world environment. The authors acknowledge this and suggest that AeroVerse could be complemented by physical testbeds and field trials to further validate the performance of the developed models.
Additionally, the paper does not provide detailed information on the specific environments, task difficulties, and evaluation metrics used within the AeroVerse benchmark. A more comprehensive documentation of these aspects would be helpful for researchers to understand the scope and limitations of the benchmark.
Overall, the AeroVerse benchmark represents a significant contribution to the field of aerospace embodied intelligence, and its adoption could lead to substantial advancements in the development of autonomous UAV systems for a wide range of applications, from disaster response to infrastructure inspection.
Conclusion
The AeroVerse benchmark suite proposed in this paper is a valuable tool for advancing research in aerospace embodied intelligence and aerospace embodied world models. By providing a standardized and realistic simulation environment for testing UAV-Agent and visual-language models, the benchmark has the potential to drive significant progress in the development of autonomous aerial systems capable of operating in complex real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AeroVerse: UAV-Agent Benchmark Suite for Simulating, Pre-training, Finetuning, and Evaluating Aerospace Embodied World Models
Fanglong Yao, Yuanchang Yue, Youzhi Liu, Xian Sun, Kun Fu
Aerospace embodied intelligence aims to empower unmanned aerial vehicles (UAVs) and other aerospace platforms to achieve autonomous perception, cognition, and action, as well as egocentric active interaction with humans and the environment. The aerospace embodied world model serves as an effective means to realize the autonomous intelligence of UAVs and represents a necessary pathway toward aerospace embodied intelligence. However, existing embodied world models primarily focus on ground-level intelligent agents in indoor scenarios, while research on UAV intelligent agents remains unexplored. To address this gap, we construct the first large-scale real-world image-text pre-training dataset, AerialAgent-Ego10k, featuring urban drones from a first-person perspective. We also create a virtual image-text-pose alignment dataset, CyberAgent Ego500k, to facilitate the pre-training of the aerospace embodied world model. For the first time, we clearly define 5 downstream tasks, i.e., aerospace embodied scene awareness, spatial reasoning, navigational exploration, task planning, and motion decision, and construct corresponding instruction datasets, i.e., SkyAgent-Scene3k, SkyAgent-Reason3k, SkyAgent-Nav3k and SkyAgent-Plan3k, and SkyAgent-Act3k, for fine-tuning the aerospace embodiment world model. Simultaneously, we develop SkyAgentEval, the downstream task evaluation metrics based on GPT-4, to comprehensively, flexibly, and objectively assess the results, revealing the potential and limitations of 2D/3D visual language models in UAV-agent tasks. Furthermore, we integrate over 10 2D/3D visual-language models, 2 pre-training datasets, 5 finetuning datasets, more than 10 evaluation metrics, and a simulator into the benchmark suite, i.e., AeroVerse, which will be released to the community to promote exploration and development of aerospace embodied intelligence.
Read more8/29/2024

0
Simulation-based Scenario Generation for Robust Hybrid AI for Autonomy
Hambisa Keno, Nicholas J. Pioch, Christopher Guagliano, Timothy H. Chung
Application of Unmanned Aerial Vehicles (UAVs) in search and rescue, emergency management, and law enforcement has gained traction with the advent of low-cost platforms and sensor payloads. The emergence of hybrid neural and symbolic AI approaches for complex reasoning is expected to further push the boundaries of these applications with decreasing levels of human intervention. However, current UAV simulation environments lack semantic context suited to this hybrid approach. To address this gap, HAMERITT (Hybrid Ai Mission Environment for RapId Training and Testing) provides a simulation-based autonomy software framework that supports the training, testing and assurance of neuro-symbolic algorithms for autonomous maneuver and perception reasoning. HAMERITT includes scenario generation capabilities that offer mission-relevant contextual symbolic information in addition to raw sensor data. Scenarios include symbolic descriptions for entities of interest and their relations to scene elements, as well as spatial-temporal constraints in the form of time-bounded areas of interest with prior probabilities and restricted zones within those areas. HAMERITT also features support for training distinct algorithm threads for maneuver vs. perception within an end-to-end mission run. Future work includes improving scenario realism and scaling symbolic context generation through automated workflow.
Read more9/11/2024
0
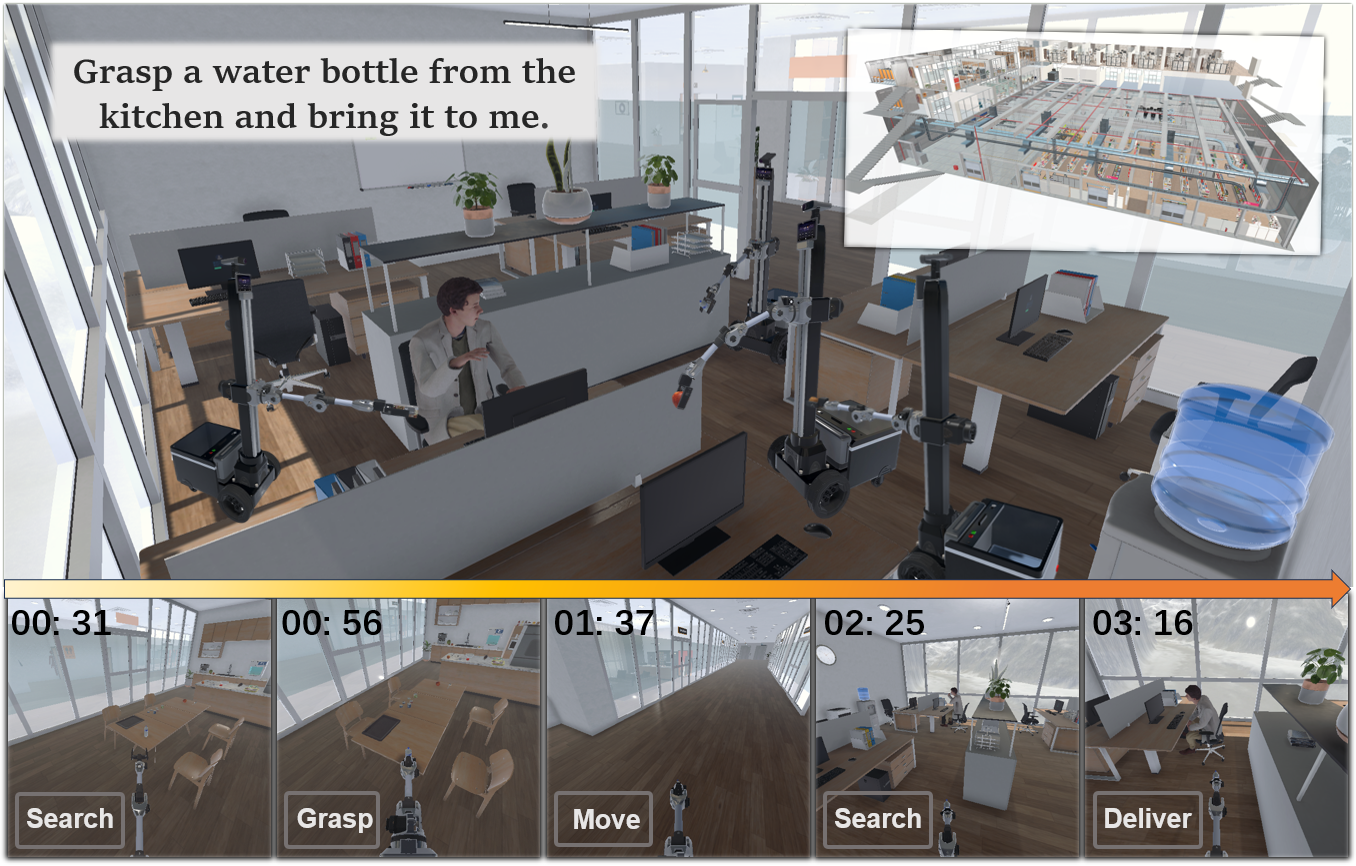
Human-centered In-building Embodied Delivery Benchmark
Zhuoqun Xu, Yang Liu, Xiaoqi Li, Jiyao Zhang, Hao Dong
Recently, the concept of embodied intelligence has been widely accepted and popularized, leading people to naturally consider the potential for commercialization in this field. In this work, we propose a specific commercial scenario simulation, human-centered in-building embodied delivery. Furthermore, for this scenario, we have developed a brand-new virtual environment system from scratch, constructing a multi-level connected building space modeled after a polar research station. This environment also includes autonomous human characters and robots with grasping and mobility capabilities, as well as a large number of interactive items. Based on this environment, we have built a delivery dataset containing 13k language instructions to guide robots in providing services. We simulate human behavior through human characters and sample their various needs in daily life. Finally, we proposed a method centered around a large multimodal model to serve as the baseline system for this dataset. Compared to past embodied data work, our work focuses on a virtual environment centered around human-robot interaction for commercial scenarios. We believe this will bring new perspectives and exploration angles to the embodied community.
Read more6/27/2024

0
Aligning Cyber Space with Physical World: A Comprehensive Survey on Embodied AI
Yang Liu, Weixing Chen, Yongjie Bai, Guanbin Li, Wen Gao, Liang Lin
Embodied Artificial Intelligence (Embodied AI) is crucial for achieving Artificial General Intelligence (AGI) and serves as a foundation for various applications that bridge cyberspace and the physical world. Recently, the emergence of Multi-modal Large Models (MLMs) and World Models (WMs) have attracted significant attention due to their remarkable perception, interaction, and reasoning capabilities, making them a promising architecture for the brain of embodied agents. However, there is no comprehensive survey for Embodied AI in the era of MLMs. In this survey, we give a comprehensive exploration of the latest advancements in Embodied AI. Our analysis firstly navigates through the forefront of representative works of embodied robots and simulators, to fully understand the research focuses and their limitations. Then, we analyze four main research targets: 1) embodied perception, 2) embodied interaction, 3) embodied agent, and 4) sim-to-real adaptation, covering the state-of-the-art methods, essential paradigms, and comprehensive datasets. Additionally, we explore the complexities of MLMs in virtual and real embodied agents, highlighting their significance in facilitating interactions in dynamic digital and physical environments. Finally, we summarize the challenges and limitations of embodied AI and discuss their potential future directions. We hope this survey will serve as a foundational reference for the research community and inspire continued innovation. The associated project can be found at https://github.com/HCPLab-SYSU/Embodied_AI_Paper_List.
Read more7/23/2024