AgentsCoMerge: Large Language Model Empowered Collaborative Decision Making for Ramp Merging

0

Sign in to get full access
Overview
- This paper presents AgentsCoMerge, a framework for collaborative decision-making in multi-lane merging scenarios using large language models (LLMs).
- The goal is to enable connected and autonomous vehicles (CAVs) to coordinate their actions and make informed decisions to navigate multi-lane merging situations efficiently.
- The proposed approach leverages the natural language understanding and generation capabilities of LLMs to facilitate communication and collaboration between CAVs.
Plain English Explanation
The paper discusses a system called AgentsCoMerge that helps self-driving cars work together to navigate multi-lane merging situations on the road. The key idea is to use advanced language models, which are AI systems trained on vast amounts of text data, to enable the cars to communicate and coordinate their actions.
In a typical multi-lane merging scenario, such as when a highway ramp joins the main highway, vehicles need to smoothly merge into the traffic flow. This can be challenging, especially when there are many cars involved. AgentsCoMerge aims to make this process more efficient by allowing the self-driving cars to share information and collectively decide the best way to merge.
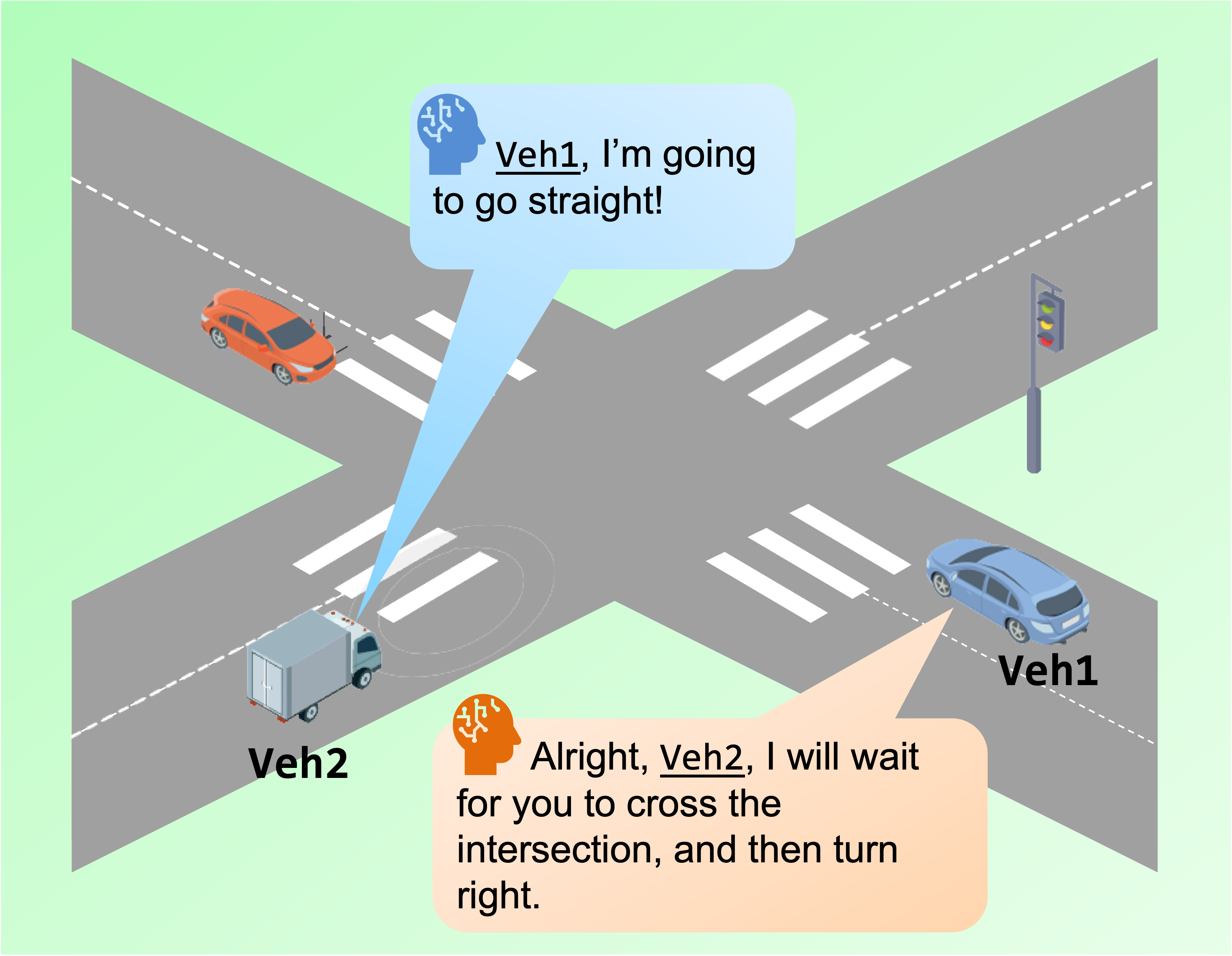
For example, one car might say to the others, "I'm in the right lane and need to merge left. Can you all slow down a bit to make space for me?" The other cars can then respond and adjust their speeds accordingly, leading to a more coordinated and seamless merging process. By using language models, the cars can understand the context and intent behind these communications, rather than just following a predetermined set of rules.
The researchers believe this collaborative approach can help improve traffic flow, reduce congestion, and make the roads safer for everyone. It's an interesting application of advanced AI technology to solve a real-world transportation challenge.
Technical Explanation
The AgentsCoMerge framework consists of three key components:
-
Language Model: The system uses a large language model (LLM) to enable natural language understanding and generation between the connected and autonomous vehicles (CAVs). The LLM allows the CAVs to communicate their intentions, negotiate, and coordinate their actions using human-like language.
-
Decision-Making Module: This module uses the information gathered from the LLM to make informed decisions about the optimal merging strategy. It considers factors such as the current traffic conditions, the positions and speeds of the surrounding vehicles, and the goals of each CAV.
-
Control Module: The control module translates the decisions made by the decision-making module into specific control actions, such as adjusting the speed, lane position, or acceleration of the CAV.
The researchers evaluated the performance of AgentsCoMerge through simulation experiments, comparing it to a baseline approach that uses fixed merging rules. The results showed that AgentsCoMerge was able to achieve smoother merging, reduced travel times, and lower fuel consumption, demonstrating the potential benefits of this collaborative decision-making approach.
Critical Analysis
The paper provides a promising approach to addressing the challenges of multi-lane merging, but there are a few potential limitations and areas for further research:
-
Real-world deployment: The evaluation was conducted in a simulation environment, and the performance of the system in real-world driving conditions remains to be tested. Factors such as sensor accuracy, communication reliability, and the heterogeneity of vehicle types may introduce additional complexities.
-
Scalability and robustness: The paper focuses on a specific multi-lane merging scenario, but it's unclear how the system would scale to more complex traffic situations or handle unexpected events, such as the sudden appearance of a non-connected vehicle.
-
Ethical considerations: As with any AI-powered decision-making system, there may be ethical concerns regarding the fairness and accountability of the decisions made by AgentsCoMerge, especially in situations where conflicting priorities or trade-offs are involved.
-
Privacy and security: The collaborative nature of the system raises questions about data privacy and the potential for cyber attacks that could disrupt the coordination between vehicles.
Further research could explore these areas and address the identified limitations to ensure the robust and responsible deployment of such collaborative decision-making systems in real-world transportation networks.
Conclusion
The AgentsCoMerge framework represents an innovative approach to addressing the challenges of multi-lane merging using large language models and collaborative decision-making. By enabling connected and autonomous vehicles to communicate and coordinate their actions, the system has the potential to improve traffic flow, reduce congestion, and enhance overall road safety.
While the paper provides a promising proof-of-concept, additional research is needed to address the identified limitations and ensure the system's scalability, robustness, and ethical considerations. As autonomous vehicle technology continues to advance, frameworks like AgentsCoMerge could play a crucial role in shaping the future of intelligent transportation systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AgentsCoMerge: Large Language Model Empowered Collaborative Decision Making for Ramp Merging
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang, Sam Kwong
Ramp merging is one of the bottlenecks in traffic systems, which commonly cause traffic congestion, accidents, and severe carbon emissions. In order to address this essential issue and enhance the safety and efficiency of connected and autonomous vehicles (CAVs) at multi-lane merging zones, we propose a novel collaborative decision-making framework, named AgentsCoMerge, to leverage large language models (LLMs). Specifically, we first design a scene observation and understanding module to allow an agent to capture the traffic environment. Then we propose a hierarchical planning module to enable the agent to make decisions and plan trajectories based on the observation and the agent's own state. In addition, in order to facilitate collaboration among multiple agents, we introduce a communication module to enable the surrounding agents to exchange necessary information and coordinate their actions. Finally, we develop a reinforcement reflection guided training paradigm to further enhance the decision-making capability of the framework. Extensive experiments are conducted to evaluate the performance of our proposed method, demonstrating its superior efficiency and effectiveness for multi-agent collaborative decision-making under various ramp merging scenarios.
Read more8/9/2024
0
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
Read more4/23/2024
0
Towards Interactive and Learnable Cooperative Driving Automation: a Large Language Model-Driven Decision-Making Framework
Shiyu Fang, Jiaqi Liu, Mingyu Ding, Yiming Cui, Chen Lv, Peng Hang, Jian Sun
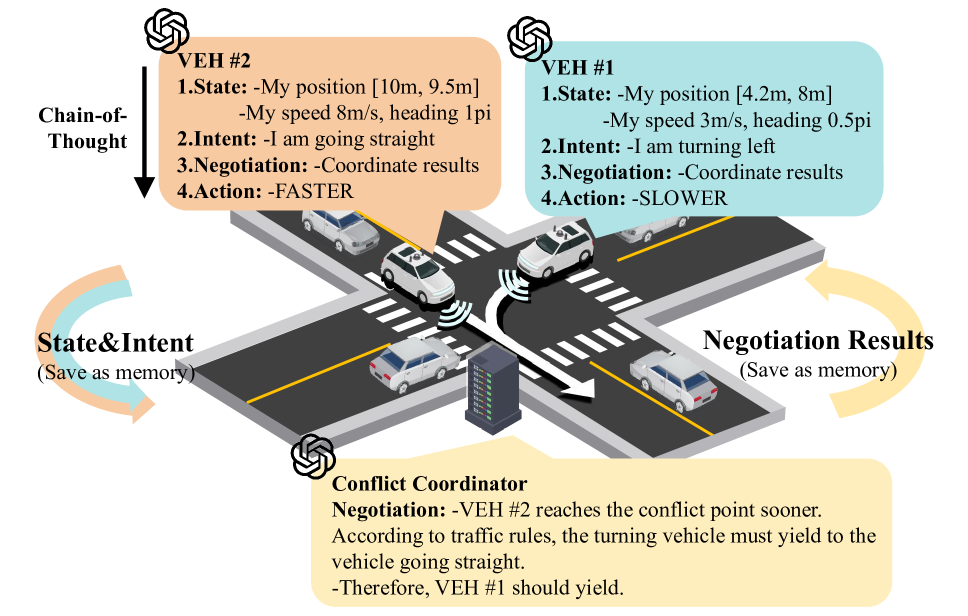
At present, Connected Autonomous Vehicles (CAVs) have begun to open road testing around the world, but their safety and efficiency performance in complex scenarios is still not satisfactory. Cooperative driving leverages the connectivity ability of CAVs to achieve synergies greater than the sum of their parts, making it a promising approach to improving CAV performance in complex scenarios. However, the lack of interaction and continuous learning ability limits current cooperative driving to single-scenario applications and specific Cooperative Driving Automation (CDA). To address these challenges, this paper proposes CoDrivingLLM, an interactive and learnable LLM-driven cooperative driving framework, to achieve all-scenario and all-CDA. First, since Large Language Models(LLMs) are not adept at handling mathematical calculations, an environment module is introduced to update vehicle positions based on semantic decisions, thus avoiding potential errors from direct LLM control of vehicle positions. Second, based on the four levels of CDA defined by the SAE J3216 standard, we propose a Chain-of-Thought (COT) based reasoning module that includes state perception, intent sharing, negotiation, and decision-making, enhancing the stability of LLMs in multi-step reasoning tasks. Centralized conflict resolution is then managed through a conflict coordinator in the reasoning process. Finally, by introducing a memory module and employing retrieval-augmented generation, CAVs are endowed with the ability to learn from their past experiences. We validate the proposed CoDrivingLLM through ablation experiments on the negotiation module, reasoning with different shots experience, and comparison with other cooperative driving methods.
Read more9/24/2024

0
Reinforcement Learning with Latent State Inference for Autonomous On-ramp Merging under Observation Delay
Amin Tabrizian, Zhitong Huang, Peng Wei
This paper presents a novel approach to address the challenging problem of autonomous on-ramp merging, where a self-driving vehicle needs to seamlessly integrate into a flow of vehicles on a multi-lane highway. We introduce the Lane-keeping, Lane-changing with Latent-state Inference and Safety Controller (L3IS) agent, designed to perform the on-ramp merging task safely without comprehensive knowledge about surrounding vehicles' intents or driving styles. We also present an augmentation of this agent called AL3IS that accounts for observation delays, allowing the agent to make more robust decisions in real-world environments with vehicle-to-vehicle (V2V) communication delays. By modeling the unobservable aspects of the environment through latent states, such as other drivers' intents, our approach enhances the agent's ability to adapt to dynamic traffic conditions, optimize merging maneuvers, and ensure safe interactions with other vehicles. We demonstrate the effectiveness of our method through extensive simulations generated from real traffic data and compare its performance with existing approaches. L3IS shows a 99.90% success rate in a challenging on-ramp merging case generated from the real US Highway 101 data. We further perform a sensitivity analysis on AL3IS to evaluate its robustness against varying observation delays, which demonstrates an acceptable performance of 93.84% success rate in 1-second V2V communication delay.
Read more6/24/2024