Towards Interactive and Learnable Cooperative Driving Automation: a Large Language Model-Driven Decision-Making Framework

0
Sign in to get full access
Overview
- Presents a decision-making framework for cooperative driving automation that leverages large language models
- Aims to enable interactive and learnable cooperative driving behaviors between autonomous vehicles
- Focuses on conflict negotiation and resolution in complex driving scenarios
Plain English Explanation
This paper introduces a new decision-making framework for autonomous vehicles that uses large language models to enable more cooperative and interactive driving behaviors. The key idea is to leverage the powerful natural language understanding and generation capabilities of large language models to help autonomous vehicles negotiate and resolve conflicts that arise in complex driving situations.
In traditional autonomous driving systems, vehicles often make decisions independently without considering the intentions or actions of other nearby vehicles. This can lead to conflicts and inefficiencies, especially in dense traffic or complex intersections. The proposed framework aims to address this by allowing autonomous vehicles to engage in "conversations" to negotiate and reach consensus on how to proceed.
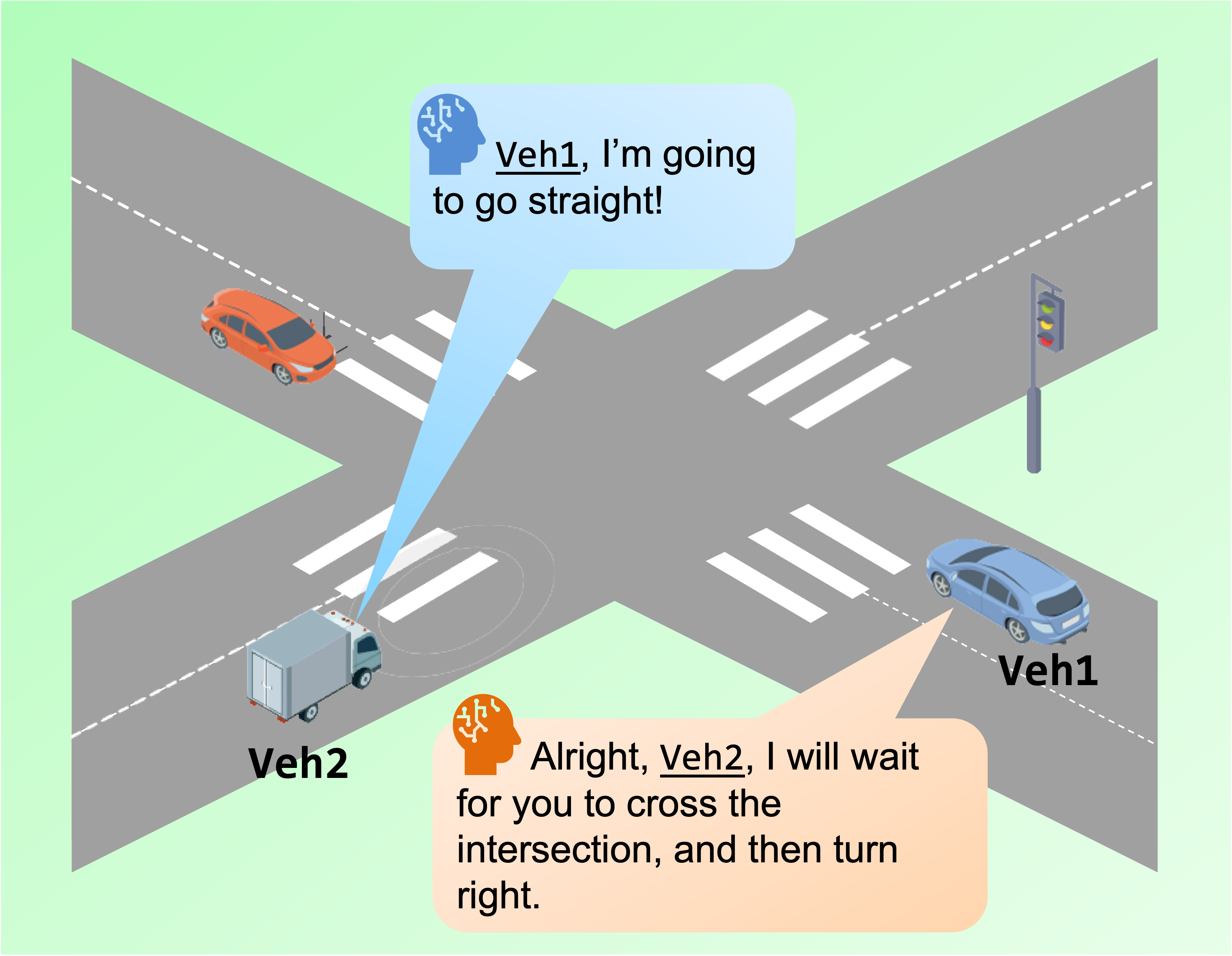
For example, if two autonomous vehicles approach an intersection at the same time, they can use natural language to communicate their intentions, identify potential conflicts, and collaboratively determine the best course of action. This could involve one vehicle yielding to the other, or the vehicles taking turns proceeding through the intersection. The language model helps the vehicles understand the context, assess the situation, and generate appropriate responses to reach a resolution.
By enabling this kind of cooperative and interactive decision-making, the framework is designed to improve the safety, efficiency, and overall user experience of autonomous driving systems. The authors suggest this approach could be particularly useful in complex urban environments where traditional rule-based systems may struggle.
Technical Explanation
The key components of the proposed decision-making framework include:
-
Retrieval-Augmented Generation (RAG): This combines a large language model's generation capabilities with a retrieval system that can pull in relevant contextual information. This allows the model to generate responses that are grounded in the specific driving scenario, rather than relying solely on generic language understanding.
-
Conflict Negotiation: The framework enables autonomous vehicles to detect potential conflicts with other vehicles, initiate a negotiation process using natural language, and collaboratively determine the best course of action to resolve the conflict.
-
Interactive and Learnable Behaviors: By engaging in natural language interactions, the autonomous vehicles can learn from each other's behaviors and adapt their own decision-making over time. This allows the system to become more sophisticated and effective through real-world experience.
The authors present results from simulation experiments that demonstrate the framework's ability to effectively negotiate and resolve conflicts in various driving scenarios. They show that the language model-driven approach outperforms traditional rule-based decision-making, particularly in complex situations where flexibility and contextual understanding are key.
Critical Analysis
One potential limitation of the proposed framework is the reliance on large language models, which can be computationally intensive and may require significant training data. The authors acknowledge this challenge and suggest that future work should explore ways to optimize the language model integration or develop alternative techniques that are more lightweight and efficient.
Additionally, while the simulation results are promising, it will be important to validate the framework's performance in real-world driving environments, which may involve additional complexities and unpredictable factors. Further research and testing will be necessary to ensure the framework's robustness and reliability in diverse traffic conditions.
Another area for further exploration is the potential for bias and ethical concerns that may arise from the use of large language models in safety-critical applications like autonomous driving. The authors do not delve into these issues, and it will be crucial for future work to carefully consider the societal implications and potential unintended consequences of this technology.
Conclusion
This paper presents a novel decision-making framework for cooperative driving automation that leverages the capabilities of large language models. By enabling autonomous vehicles to engage in natural language-based conflict negotiation and resolution, the framework aims to improve the safety, efficiency, and overall user experience of autonomous driving systems.
While the proposed approach shows promise, further research and real-world testing will be necessary to address the challenges and limitations identified in the critical analysis. As the field of autonomous driving continues to evolve, the integration of advanced language technologies like the one presented in this paper could play a crucial role in realizing the full potential of cooperative and interactive autonomous driving.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Towards Interactive and Learnable Cooperative Driving Automation: a Large Language Model-Driven Decision-Making Framework
Shiyu Fang, Jiaqi Liu, Mingyu Ding, Yiming Cui, Chen Lv, Peng Hang, Jian Sun
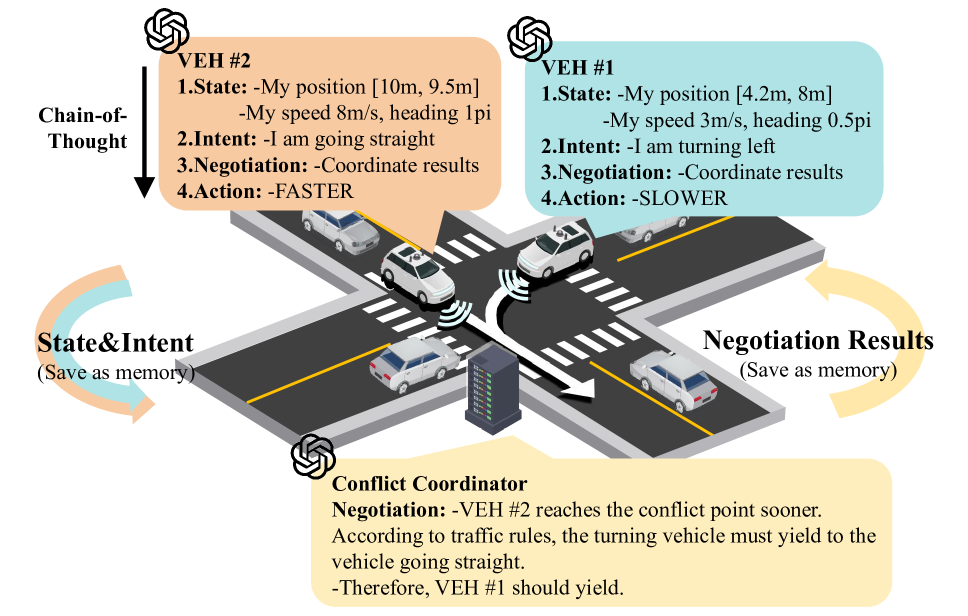
At present, Connected Autonomous Vehicles (CAVs) have begun to open road testing around the world, but their safety and efficiency performance in complex scenarios is still not satisfactory. Cooperative driving leverages the connectivity ability of CAVs to achieve synergies greater than the sum of their parts, making it a promising approach to improving CAV performance in complex scenarios. However, the lack of interaction and continuous learning ability limits current cooperative driving to single-scenario applications and specific Cooperative Driving Automation (CDA). To address these challenges, this paper proposes CoDrivingLLM, an interactive and learnable LLM-driven cooperative driving framework, to achieve all-scenario and all-CDA. First, since Large Language Models(LLMs) are not adept at handling mathematical calculations, an environment module is introduced to update vehicle positions based on semantic decisions, thus avoiding potential errors from direct LLM control of vehicle positions. Second, based on the four levels of CDA defined by the SAE J3216 standard, we propose a Chain-of-Thought (COT) based reasoning module that includes state perception, intent sharing, negotiation, and decision-making, enhancing the stability of LLMs in multi-step reasoning tasks. Centralized conflict resolution is then managed through a conflict coordinator in the reasoning process. Finally, by introducing a memory module and employing retrieval-augmented generation, CAVs are endowed with the ability to learn from their past experiences. We validate the proposed CoDrivingLLM through ablation experiments on the negotiation module, reasoning with different shots experience, and comparison with other cooperative driving methods.
Read more9/24/2024
0
AgentsCoDriver: Large Language Model Empowered Collaborative Driving with Lifelong Learning
Senkang Hu, Zhengru Fang, Zihan Fang, Yiqin Deng, Xianhao Chen, Yuguang Fang
Connected and autonomous driving is developing rapidly in recent years. However, current autonomous driving systems, which are primarily based on data-driven approaches, exhibit deficiencies in interpretability, generalization, and continuing learning capabilities. In addition, the single-vehicle autonomous driving systems lack of the ability of collaboration and negotiation with other vehicles, which is crucial for the safety and efficiency of autonomous driving systems. In order to address these issues, we leverage large language models (LLMs) to develop a novel framework, AgentsCoDriver, to enable multiple vehicles to conduct collaborative driving. AgentsCoDriver consists of five modules: observation module, reasoning engine, cognitive memory module, reinforcement reflection module, and communication module. It can accumulate knowledge, lessons, and experiences over time by continuously interacting with the environment, thereby making itself capable of lifelong learning. In addition, by leveraging the communication module, different agents can exchange information and realize negotiation and collaboration in complex traffic environments. Extensive experiments are conducted and show the superiority of AgentsCoDriver.
Read more4/23/2024

0
LMMCoDrive: Cooperative Driving with Large Multimodal Model
Haichao Liu, Ruoyu Yao, Zhenmin Huang, Shaojie Shen, Jun Ma
To address the intricate challenges of decentralized cooperative scheduling and motion planning in Autonomous Mobility-on-Demand (AMoD) systems, this paper introduces LMMCoDrive, a novel cooperative driving framework that leverages a Large Multimodal Model (LMM) to enhance traffic efficiency in dynamic urban environments. This framework seamlessly integrates scheduling and motion planning processes to ensure the effective operation of Cooperative Autonomous Vehicles (CAVs). The spatial relationship between CAVs and passenger requests is abstracted into a Bird's-Eye View (BEV) to fully exploit the potential of the LMM. Besides, trajectories are cautiously refined for each CAV while ensuring collision avoidance through safety constraints. A decentralized optimization strategy, facilitated by the Alternating Direction Method of Multipliers (ADMM) within the LMM framework, is proposed to drive the graph evolution of CAVs. Simulation results demonstrate the pivotal role and significant impact of LMM in optimizing CAV scheduling and enhancing decentralized cooperative optimization process for each vehicle. This marks a substantial stride towards achieving practical, efficient, and safe AMoD systems that are poised to revolutionize urban transportation. The code is available at https://github.com/henryhcliu/LMMCoDrive.
Read more9/19/2024

0
Making Large Language Models Better Planners with Reasoning-Decision Alignment
Zhijian Huang, Tao Tang, Shaoxiang Chen, Sihao Lin, Zequn Jie, Lin Ma, Guangrun Wang, Xiaodan Liang
Data-driven approaches for autonomous driving (AD) have been widely adopted in the past decade but are confronted with dataset bias and uninterpretability. Inspired by the knowledge-driven nature of human driving, recent approaches explore the potential of large language models (LLMs) to improve understanding and decision-making in traffic scenarios. They find that the pretrain-finetune paradigm of LLMs on downstream data with the Chain-of-Thought (CoT) reasoning process can enhance explainability and scene understanding. However, such a popular strategy proves to suffer from the notorious problems of misalignment between the crafted CoTs against the consequent decision-making, which remains untouched by previous LLM-based AD methods. To address this problem, we motivate an end-to-end decision-making model based on multimodality-augmented LLM, which simultaneously executes CoT reasoning and carries out planning results. Furthermore, we propose a reasoning-decision alignment constraint between the paired CoTs and planning results, imposing the correspondence between reasoning and decision-making. Moreover, we redesign the CoTs to enable the model to comprehend complex scenarios and enhance decision-making performance. We dub our proposed large language planners with reasoning-decision alignment as RDA-Driver. Experimental evaluations on the nuScenes and DriveLM-nuScenes benchmarks demonstrate the effectiveness of our RDA-Driver in enhancing the performance of end-to-end AD systems. Specifically, our RDA-Driver achieves state-of-the-art planning performance on the nuScenes dataset with 0.80 L2 error and 0.32 collision rate, and also achieves leading results on challenging DriveLM-nuScenes benchmarks with 0.82 L2 error and 0.38 collision rate.
Read more8/27/2024