AI Algorithm for Predicting and Optimizing Trajectory of UAV Swarm

0
Sign in to get full access
Overview
- This paper presents an AI algorithm for predicting and optimizing the trajectory of a swarm of unmanned aerial vehicles (UAVs).
- The algorithm uses a combination of machine learning techniques, including neural networks and optimization algorithms, to forecast the future positions of the UAVs and plan their movements to achieve specific objectives.
- Key goals of the algorithm include collision avoidance, energy efficiency, and task completion within a given time frame.
Plain English Explanation
The researchers have developed a new AI system that can help coordinate the movements of a group, or "swarm," of drones. Drones are becoming increasingly popular for a variety of applications, such as search and rescue operations, precision agriculture, and communication relay networks. However, controlling a swarm of drones can be challenging, as they need to avoid colliding with each other while also accomplishing their assigned tasks efficiently.
The AI algorithm developed in this paper tries to solve this problem by using machine learning techniques to predict where the drones will be in the future. It can then plan the best paths for the drones to take, ensuring they don't crash into each other and also complete their objectives as quickly and with as little energy use as possible. This could be useful for scenarios where a team of drones needs to work together, such as surveying a large area or providing communication coverage over a wide region.
Technical Explanation
The researchers propose an AI algorithm that combines neural networks and optimization techniques to predict and optimize the trajectories of a UAV swarm. The key components of the algorithm are:
-
Trajectory Prediction: The algorithm uses a neural network to forecast the future positions of each UAV in the swarm based on their current states (position, velocity, etc.) and environmental factors. This allows the system to anticipate potential collisions between drones.
-
Collision Avoidance: An optimization module plans the safest and most energy-efficient paths for the UAVs to follow, taking the predicted trajectories into account. This helps the drones navigate around each other and avoid midair collisions.
-
Task Optimization: The algorithm also considers the specific objectives the UAV swarm needs to achieve, such as complete coverage of an area or maintaining a communication network. It adjusts the drone movements to accomplish these tasks as efficiently as possible.
The researchers tested their algorithm in simulation environments and found that it was able to effectively coordinate the movements of UAV swarms, resulting in successful task completion with low energy consumption and no collisions. This suggests the potential for this approach to be applied in real-world scenarios involving collaborative drone operations.
Critical Analysis
The paper provides a comprehensive description of the AI algorithm and its key components. However, the authors note that their simulations were conducted in idealized environments, and more research is needed to evaluate the algorithm's performance in realistic, complex scenarios with factors such as sensor noise, communication delays, and environmental disturbances.
Additionally, the paper does not address potential security and privacy concerns that may arise from the use of autonomous UAV swarms, such as vulnerability to jamming attacks or the risks of misuse. These are important considerations that should be explored further as the technology advances.
Conclusion
This paper presents a promising AI-based approach for coordinating the movements of UAV swarms to achieve specific objectives while maintaining safety and efficiency. The algorithm's ability to predict future trajectories and plan optimal paths could be a valuable tool for a wide range of applications, from search and rescue missions to precision agriculture and communication networks. As the technology continues to evolve, it will be important to address potential challenges and ethical considerations to ensure the safe and responsible use of these autonomous systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AI Algorithm for Predicting and Optimizing Trajectory of UAV Swarm
Amit Raj, Kapil Ahuja, Yann Busnel
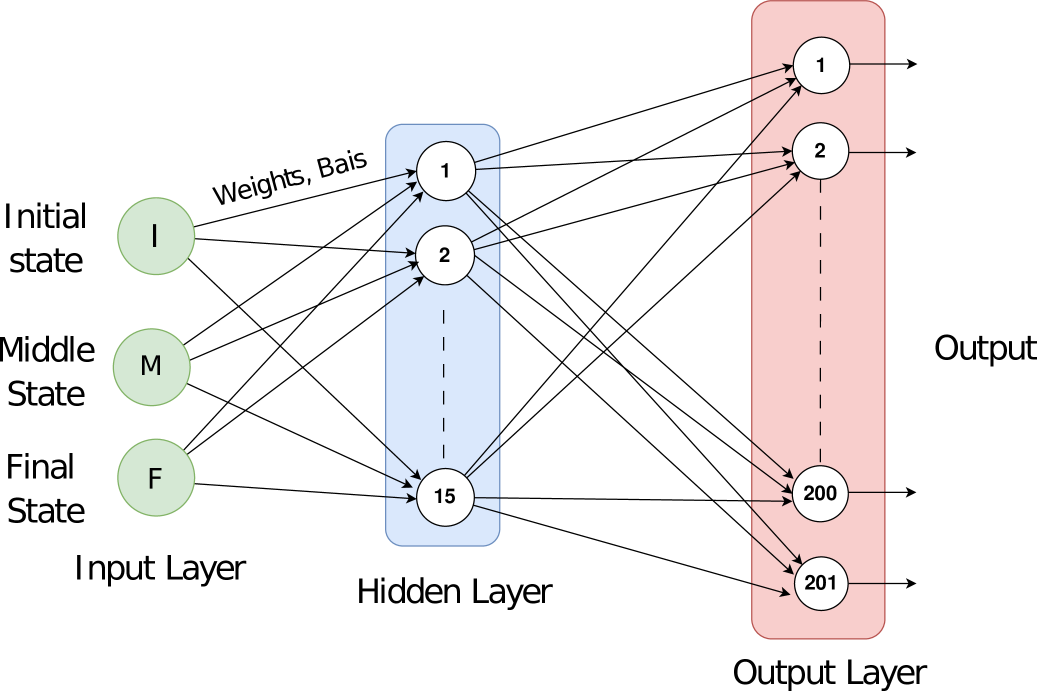
This paper explores the application of Artificial Intelligence (AI) techniques for generating the trajectories of fleets of Unmanned Aerial Vehicles (UAVs). The two main challenges addressed include accurately predicting the paths of UAVs and efficiently avoiding collisions between them. Firstly, the paper systematically applies a diverse set of activation functions to a Feedforward Neural Network (FFNN) with a single hidden layer, which enhances the accuracy of the predicted path compared to previous work. Secondly, we introduce a novel activation function, AdaptoSwelliGauss, which is a sophisticated fusion of Swish and Elliott activations, seamlessly integrated with a scaled and shifted Gaussian component. Swish facilitates smooth transitions, Elliott captures abrupt trajectory changes, and the scaled and shifted Gaussian enhances robustness against noise. This dynamic combination is specifically designed to excel in capturing the complexities of UAV trajectory prediction. This new activation function gives substantially better accuracy than all existing activation functions. Thirdly, we propose a novel Integrated Collision Detection, Avoidance, and Batching (ICDAB) strategy that merges two complementary UAV collision avoidance techniques: changing UAV trajectories and altering their starting times, also referred to as batching. This integration helps overcome the disadvantages of both - reduction in the number of trajectory manipulations, which avoids overly convoluted paths in the first technique, and smaller batch sizes, which reduce overall takeoff time in the second.
Read more5/21/2024
🔍
0
A reformulation of collision avoidance algorithm based on artificial potential fields for fixed-wing UAVs in a dynamic environment
Astik Srivastava, P. B. Sujit
As mini UAVs become increasingly useful in the civilian work domain, the need for a method for them to operate safely in a cluttered environment is growing, especially for fixed-wing UAVs as they are incapable of following the stop-decide-execute methodology. This paper presents preliminary research to design a reactive collision avoidance algorithm based on the improved definition of the repulsive forces used in the Artificial potential field algorithms to allow feasible and safe navigation of fixed-wing UAVs in cluttered, dynamic environments. We present simulation results of the improved definition in multiple scenarios, and we have also discussed possible future studies to improve upon these results.
Read more4/24/2024
0
Model-Predictive Trajectory Generation for Autonomous Aerial Search and Coverage
Hugo Matias, Daniel Silvestre
This paper addresses the trajectory planning problem for search and coverage missions with an Unmanned Aerial Vehicle (UAV). The objective is to devise optimal coverage trajectories based on a utility map describing prior region information, assumed to be effectively approximated by a Gaussian Mixture Model (GMM). We introduce a Model Predictive Control (MPC) algorithm employing a relaxed formulation that promotes the exploration of the map by preventing the UAV from revisiting previously covered areas. This is achieved by penalizing intersections between the UAV's visibility regions along its trajectory. The algorithm is assessed in MATLAB and validated in Gazebo, as well as in outdoor experimental tests. The results show that the proposed strategy can generate efficient and smooth trajectories for search and coverage missions.
Read more4/8/2024
🛸
0
Multi-UAVs end-to-end Distributed Trajectory Generation over Point Cloud Data
Antonio Marino (RAINBOW), Claudio Pacchierotti (RAINBOW), Paolo Robuffo Giordano (RAINBOW)
This paper introduces an end-to-end trajectory planning algorithm tailored for multi-UAV systems that generates collision-free trajectories in environments populated with both static and dynamic obstacles, leveraging point cloud data. Our approach consists of a 2-fork neural network fed with sensing and localization data, able to communicate intermediate learned features among the agents. One network branch crafts an initial collision-free trajectory estimate, while the other devises a neural collision constraint for subsequent optimization, ensuring trajectory continuity and adherence to physicalactuation limits. Extensive simulations in challenging cluttered environments, involving up to 25 robots and 25% obstacle density, show a collision avoidance success rate in the range of 100 -- 85%. Finally, we introduce a saliency map computation method acting on the point cloud data, offering qualitative insights into our methodology.
Read more7/1/2024