Analyzing the impact of semantic LoD3 building models on image-based vehicle localization

0

Sign in to get full access
Overview
- Explores the impact of using semantic 3D building models (Level of Detail 3) on the accuracy of image-based vehicle localization
- Focuses on combining cameras and semantic building models to improve localization in urban environments
- Evaluates the performance of vehicle localization using different levels of detail in the building models
Plain English Explanation
The paper examines how detailed 3D models of buildings can affect the accuracy of locating vehicles using camera images. Vehicles need to know their precise location to navigate safely, especially in crowded urban areas. The researchers tested using more semantic (information-rich) 3D building models versus basic 3D models to see if that could improve the vehicle's ability to figure out where it is based on the camera images.
Technical Explanation
The paper investigates the impact of using semantic LoD3 building models on the accuracy of image-based vehicle localization. The authors hypothesize that incorporating more detailed 3D building models, which include semantic information like window and door locations, can enhance the performance of vehicle localization compared to basic 3D building models.
The researchers conducted experiments to evaluate vehicle localization accuracy using different levels of detail in the building models, ranging from simple 3D shapes to semantically-enriched LoD3 models. The vehicle localization was performed using a combination of camera images and the 3D building data. The team measured the localization error to assess how the building model detail impacted the vehicle's ability to determine its precise location.
Critical Analysis
The paper provides a thorough exploration of the relationship between building model detail and vehicle localization accuracy. However, the authors acknowledge some limitations, such as only testing in a single urban environment. Further research could evaluate the approach in additional settings to validate the generalizability of the findings.
Additionally, the paper does not delve into the computational costs or real-time performance implications of using more complex LoD3 building models for vehicle localization. This is an important consideration for deploying such systems in live autonomous driving scenarios.
Conclusion
This research demonstrates that incorporating semantically-rich LoD3 building models can enhance the accuracy of image-based vehicle localization compared to simpler 3D building representations. By leveraging detailed information about building structures, autonomous vehicles can more precisely determine their location, which is crucial for safe navigation in crowded urban areas. The findings highlight the value of combining high-fidelity 3D maps with camera-based perception for robust vehicle localization.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Analyzing the impact of semantic LoD3 building models on image-based vehicle localization
Antonia Bieringer, Olaf Wysocki, Sebastian Tuttas, Ludwig Hoegner, Christoph Holst
Numerous navigation applications rely on data from global navigation satellite systems (GNSS), even though their accuracy is compromised in urban areas, posing a significant challenge, particularly for precise autonomous car localization. Extensive research has focused on enhancing localization accuracy by integrating various sensor types to address this issue. This paper introduces a novel approach for car localization, leveraging image features that correspond with highly detailed semantic 3D building models. The core concept involves augmenting positioning accuracy by incorporating prior geometric and semantic knowledge into calculations. The work assesses outcomes using Level of Detail 2 (LoD2) and Level of Detail 3 (LoD3) models, analyzing whether facade-enriched models yield superior accuracy. This comprehensive analysis encompasses diverse methods, including off-the-shelf feature matching and deep learning, facilitating thorough discussion. Our experiments corroborate that LoD3 enables detecting up to 69% more features than using LoD2 models. We believe that this study will contribute to the research of enhancing positioning accuracy in GNSS-denied urban canyons. It also shows a practical application of under-explored LoD3 building models on map-based car positioning.
Read more8/1/2024
0
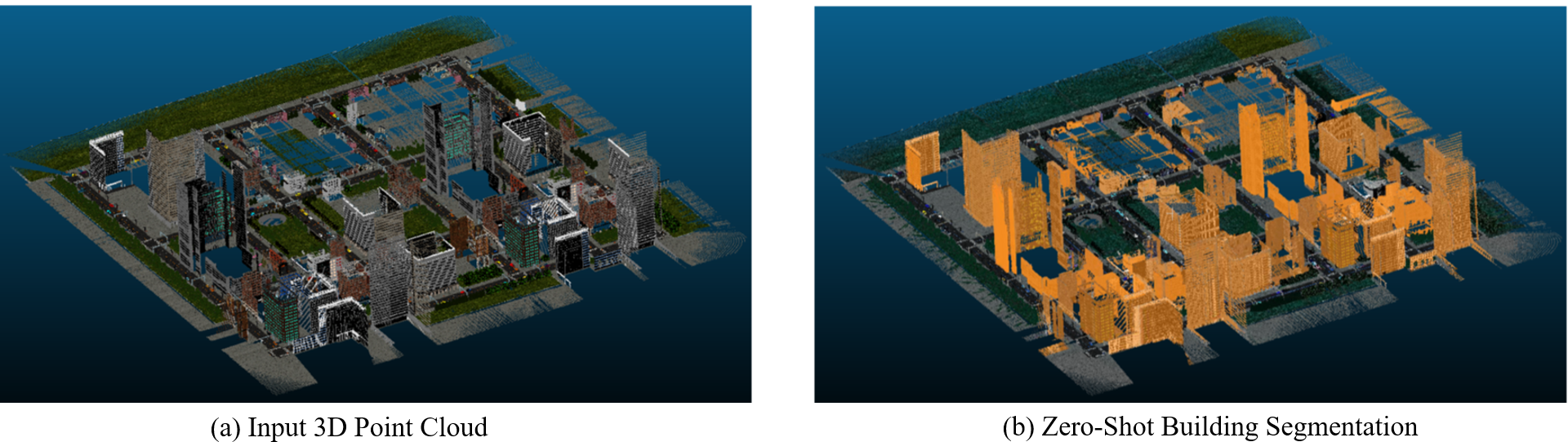
Zero-shot detection of buildings in mobile LiDAR using Language Vision Model
June Moh Goo, Zichao Zeng, Jan Boehm
Recent advances have demonstrated that Language Vision Models (LVMs) surpass the existing State-of-the-Art (SOTA) in two-dimensional (2D) computer vision tasks, motivating attempts to apply LVMs to three-dimensional (3D) data. While LVMs are efficient and effective in addressing various downstream 2D vision tasks without training, they face significant challenges when it comes to point clouds, a representative format for representing 3D data. It is more difficult to extract features from 3D data and there are challenges due to large data sizes and the cost of the collection and labelling, resulting in a notably limited availability of datasets. Moreover, constructing LVMs for point clouds is even more challenging due to the requirements for large amounts of data and training time. To address these issues, our research aims to 1) apply the Grounded SAM through Spherical Projection to transfer 3D to 2D, and 2) experiment with synthetic data to evaluate its effectiveness in bridging the gap between synthetic and real-world data domains. Our approach exhibited high performance with an accuracy of 0.96, an IoU of 0.85, precision of 0.92, recall of 0.91, and an F1 score of 0.92, confirming its potential. However, challenges such as occlusion problems and pixel-level overlaps of multi-label points during spherical image generation remain to be addressed in future studies.
Read more4/16/2024

0
Monocular Localization with Semantics Map for Autonomous Vehicles
Jixiang Wan, Xudong Zhang, Shuzhou Dong, Yuwei Zhang, Yuchen Yang, Ruoxi Wu, Ye Jiang, Jijunnan Li, Jinquan Lin, Ming Yang
Accurate and robust localization remains a significant challenge for autonomous vehicles. The cost of sensors and limitations in local computational efficiency make it difficult to scale to large commercial applications. Traditional vision-based approaches focus on texture features that are susceptible to changes in lighting, season, perspective, and appearance. Additionally, the large storage size of maps with descriptors and complex optimization processes hinder system performance. To balance efficiency and accuracy, we propose a novel lightweight visual semantic localization algorithm that employs stable semantic features instead of low-level texture features. First, semantic maps are constructed offline by detecting semantic objects, such as ground markers, lane lines, and poles, using cameras or LiDAR sensors. Then, online visual localization is performed through data association of semantic features and map objects. We evaluated our proposed localization framework in the publicly available KAIST Urban dataset and in scenarios recorded by ourselves. The experimental results demonstrate that our method is a reliable and practical localization solution in various autonomous driving localization tasks.
Read more6/7/2024

0
Enriching thermal point clouds of buildings using semantic 3D building modelsenriching thermal point clouds of buildings using semantic 3D building models
Jingwei Zhu, Olaf Wysocki, Christoph Holst, Thomas H. Kolbe
Thermal point clouds integrate thermal radiation and laser point clouds effectively. However, the semantic information for the interpretation of building thermal point clouds can hardly be precisely inferred. Transferring the semantics encapsulated in 3D building models at LoD3 has a potential to fill this gap. In this work, we propose a workflow enriching thermal point clouds with the geo-position and semantics of LoD3 building models, which utilizes features of both modalities: The proposed method can automatically co-register the point clouds from different sources and enrich the thermal point cloud in facade-detailed semantics. The enriched thermal point cloud supports thermal analysis and can facilitate the development of currently scarce deep learning models operating directly on thermal point clouds.
Read more8/12/2024