Ancestral Reinforcement Learning: Unifying Zeroth-Order Optimization and Genetic Algorithms for Reinforcement Learning

0

Sign in to get full access
Overview
- Presents a novel reinforcement learning (RL) algorithm called Ancestral Reinforcement Learning (ARL) that unifies zeroth-order optimization and genetic algorithms
- ARL can efficiently explore the parameter space and find high-performing RL policies
- Experimental results show ARL outperforms state-of-the-art RL algorithms on a range of challenging tasks
Plain English Explanation
Reinforcement learning is a type of machine learning where an agent learns to make decisions by interacting with an environment and receiving rewards or penalties for its actions. The Ancestral Reinforcement Learning (ARL) algorithm is a new approach that combines two existing techniques - zeroth-order optimization and genetic algorithms - to help the agent explore the space of possible solutions more effectively.
Zeroth-order optimization is a method for optimizing a function without requiring the function's derivatives. This can be useful when the function is complex or difficult to differentiate. Genetic algorithms, on the other hand, are inspired by the process of natural selection, where a population of candidate solutions "evolves" over time to find the best one.
By combining these approaches, ARL can efficiently explore the parameter space of the reinforcement learning problem and identify high-performing policies. The algorithm works by maintaining a population of candidate solutions (policies) and iteratively updating them using a combination of random perturbations (zeroth-order optimization) and recombination (genetic algorithms).
The researchers demonstrate that ARL outperforms state-of-the-art reinforcement learning algorithms on a range of challenging tasks, suggesting that this unified approach can be a powerful tool for solving complex RL problems.
Technical Explanation
The key idea behind Ancestral Reinforcement Learning (ARL) is to leverage both zeroth-order optimization and genetic algorithms to improve the exploration and convergence properties of reinforcement learning.
The algorithm maintains a population of candidate solutions (policies), which are iteratively updated using a combination of random perturbations (zeroth-order optimization) and recombination (genetic algorithms). Specifically, in each iteration:
- Evaluation: Each policy in the population is evaluated on the reinforcement learning task, and a fitness score is assigned based on the cumulative reward obtained.
- Selection: The top-performing policies are selected to form the "parent" population.
- Perturbation: Random Gaussian noise is added to the parameters of the parent policies to generate a set of "child" policies.
- Recombination: Pairs of child policies are recombined using a crossover operation to generate a new set of child policies.
- Replacement: The child policies replace the worst-performing policies in the population, maintaining a constant population size.
This iterative process allows the algorithm to efficiently explore the parameter space and converge to high-performing policies. The researchers show that ARL outperforms state-of-the-art RL algorithms, such as PPO and CMA-ES, on a range of continuous control tasks from the MuJoCo environment.
Critical Analysis
The Ancestral Reinforcement Learning (ARL) paper presents a promising approach to reinforcement learning that combines zeroth-order optimization and genetic algorithms. However, there are a few potential limitations and areas for further research:
-
Scalability to high-dimensional problems: The paper primarily focuses on continuous control tasks with relatively low-dimensional state and action spaces. It's not clear how well ARL would scale to more complex, high-dimensional problems, such as those found in robotics or video games.
-
Sample efficiency: While ARL outperforms other RL algorithms on the tested tasks, it's not clear how sample-efficient the approach is compared to methods that leverage gradient information, such as policy gradient or actor-critic algorithms.
-
Interpretability and explainability: As with many RL algorithms, the policies learned by ARL may be difficult to interpret and explain, which could hinder their deployment in safety-critical applications.
-
Theoretical analysis: The paper provides limited theoretical analysis of the convergence properties and optimization guarantees of the ARL algorithm. A more rigorous theoretical investigation could help provide a deeper understanding of the method's strengths and limitations.
Despite these potential limitations, the Ancestral Reinforcement Learning approach is a novel and promising direction in reinforcement learning research, and the experimental results suggest that it could be a powerful tool for solving complex RL problems.
Conclusion
The Ancestral Reinforcement Learning (ARL) algorithm presented in this paper offers a novel approach to reinforcement learning that unifies zeroth-order optimization and genetic algorithms. By combining these techniques, ARL can efficiently explore the parameter space and find high-performing RL policies, outperforming state-of-the-art RL algorithms on a range of challenging tasks.
While the paper highlights the potential of this approach, there are also some limitations and areas for further research, such as scalability to high-dimensional problems, sample efficiency, interpretability, and theoretical analysis. Nonetheless, the ARL algorithm represents an exciting development in the field of reinforcement learning and could have significant implications for solving complex real-world problems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Ancestral Reinforcement Learning: Unifying Zeroth-Order Optimization and Genetic Algorithms for Reinforcement Learning
So Nakashima, Tetsuya J. Kobayashi
Reinforcement Learning (RL) offers a fundamental framework for discovering optimal action strategies through interactions within unknown environments. Recent advancement have shown that the performance and applicability of RL can significantly be enhanced by exploiting a population of agents in various ways. Zeroth-Order Optimization (ZOO) leverages an agent population to estimate the gradient of the objective function, enabling robust policy refinement even in non-differentiable scenarios. As another application, Genetic Algorithms (GA) boosts the exploration of policy landscapes by mutational generation of policy diversity in an agent population and its refinement by selection. A natural question is whether we can have the best of two worlds that the agent population can have. In this work, we propose Ancestral Reinforcement Learning (ARL), which synergistically combines the robust gradient estimation of ZOO with the exploratory power of GA. The key idea in ARL is that each agent within a population infers gradient by exploiting the history of its ancestors, i.e., the ancestor population in the past, while maintaining the diversity of policies in the current population as in GA. We also theoretically reveal that the populational search in ARL implicitly induces the KL-regularization of the objective function, resulting in the enhanced exploration. Our results extend the applicability of populational algorithms for RL.
Read more9/4/2024
0
Constructing Ancestral Recombination Graphs through Reinforcement Learning
M'elanie Raymond (Universit'e du Qu'ebec `a Montr'eal), Marie-H'el`ene Descary (Universit'e du Qu'ebec `a Montr'eal), C'edric Beaulac (Universit'e du Qu'ebec `a Montr'eal), Fabrice Larribe (Universit'e du Qu'ebec `a Montr'eal)
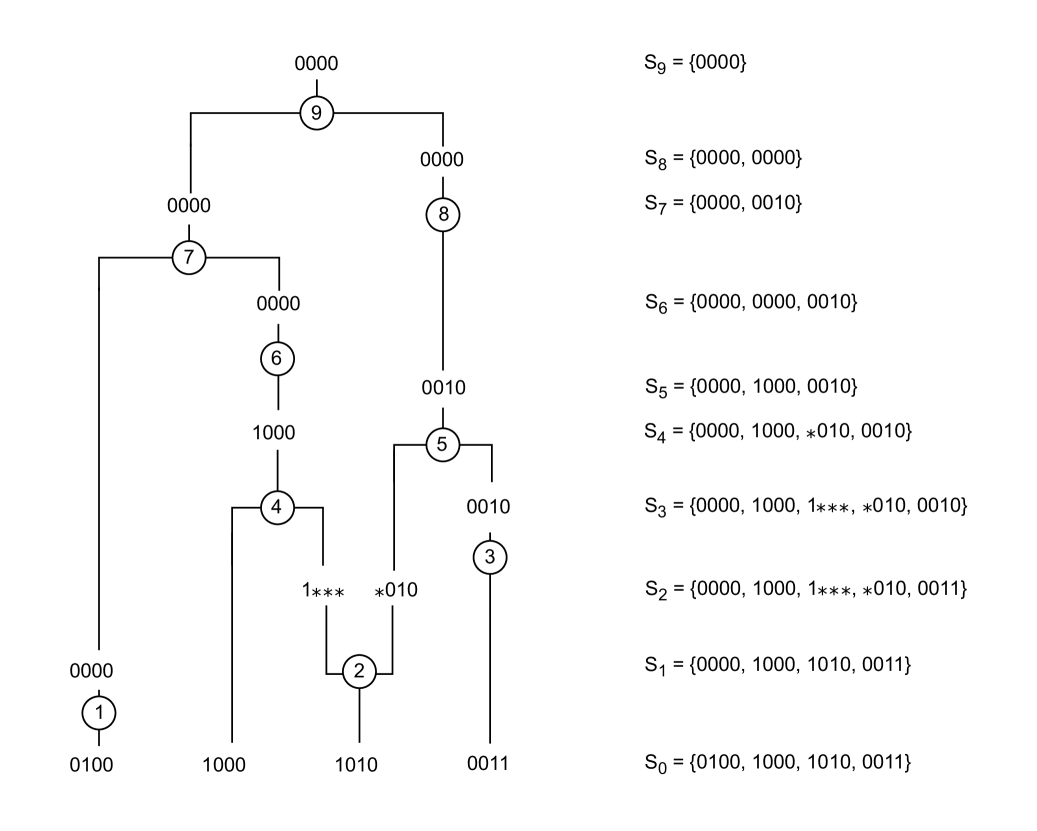
Over the years, many approaches have been proposed to build ancestral recombination graphs (ARGs), graphs used to represent the genetic relationship between individuals. Among these methods, many rely on the assumption that the most likely graph is among the shortest ones. In this paper, we propose a new approach to build short ARGs: Reinforcement Learning (RL). We exploit the similarities between finding the shortest path between a set of genetic sequences and their most recent common ancestor and finding the shortest path between the entrance and exit of a maze, a classic RL problem. In the maze problem, the learner, called the agent, must learn the directions to take in order to escape as quickly as possible, whereas in our problem, the agent must learn the actions to take between coalescence, mutation, and recombination in order to reach the most recent common ancestor as quickly as possible. Our results show that RL can be used to build ARGs as short as those built with a heuristic algorithm optimized to build short ARGs, and sometimes even shorter. Moreover, our method allows to build a distribution of short ARGs for a given sample, and can also generalize learning to new samples not used during the learning process.
Read more6/19/2024
🏅
0
Evolutionary Reinforcement Learning via Cooperative Coevolution
Chengpeng Hu, Jialin Liu, Xin Yao
Recently, evolutionary reinforcement learning has obtained much attention in various domains. Maintaining a population of actors, evolutionary reinforcement learning utilises the collected experiences to improve the behaviour policy through efficient exploration. However, the poor scalability of genetic operators limits the efficiency of optimising high-dimensional neural networks.To address this issue, this paper proposes a novel cooperative coevolutionary reinforcement learning (CoERL) algorithm. Inspired by cooperative coevolution, CoERL periodically and adaptively decomposes the policy optimisation problem into multiple subproblems and evolves a population of neural networks for each of the subproblems. Instead of using genetic operators, CoERL directly searches for partial gradients to update the policy. Updating policy with partial gradients maintains consistency between the behaviour spaces of parents and offspring across generations.The experiences collected by the population are then used to improve the entire policy, which enhances the sampling efficiency.Experiments on six benchmark locomotion tasks demonstrate that CoERL outperforms seven state-of-the-art algorithms and baselines.Ablation study verifies the unique contribution of CoERL's core ingredients.
Read more8/2/2024
🏅
0
Asynchronous Distributed Reinforcement Learning for LQR Control via Zeroth-Order Block Coordinate Descent
Gangshan Jing, He Bai, Jemin George, Aranya Chakrabortty, Piyush K. Sharma
Recently introduced distributed zeroth-order optimization (ZOO) algorithms have shown their utility in distributed reinforcement learning (RL). Unfortunately, in the gradient estimation process, almost all of them require random samples with the same dimension as the global variable and/or require evaluation of the global cost function, which may induce high estimation variance for large-scale networks. In this paper, we propose a novel distributed zeroth-order algorithm by leveraging the network structure inherent in the optimization objective, which allows each agent to estimate its local gradient by local cost evaluation independently, without use of any consensus protocol. The proposed algorithm exhibits an asynchronous update scheme, and is designed for stochastic non-convex optimization with a possibly non-convex feasible domain based on the block coordinate descent method. The algorithm is later employed as a distributed model-free RL algorithm for distributed linear quadratic regulator design, where a learning graph is designed to describe the required interaction relationship among agents in distributed learning. We provide an empirical validation of the proposed algorithm to benchmark its performance on convergence rate and variance against a centralized ZOO algorithm.
Read more5/6/2024