Anti-Byzantine Attacks Enabled Vehicle Selection for Asynchronous Federated Learning in Vehicular Edge Computing

0

Sign in to get full access
Overview
- This paper explores the use of asynchronous federated learning in vehicular edge computing to address Byzantine attacks, where some devices provide malicious updates during the training process.
- The authors propose a vehicle selection method that can identify and exclude malicious vehicles, improving the robustness of the federated learning model.
- Experiments show the proposed method can outperform existing approaches in terms of model accuracy and convergence speed, even in the presence of Byzantine attacks.
Plain English Explanation
The paper discusses a challenge in federated learning, which is a way of training machine learning models using data from many different devices without sharing the raw data. The challenge is that some of the devices might try to sabotage the training process by sending bad updates, known as "Byzantine attacks."
To address this, the researchers developed a method to select which vehicles should participate in the federated learning process. The idea is to identify and exclude any vehicles that are trying to send malicious updates, so that the final model is more reliable and accurate, even in the presence of these attacks.
The authors tested their vehicle selection method and found that it performed better than existing approaches. The model trained using their method was more accurate and converged (finished training) faster, even when some of the participating vehicles were trying to undermine the process.
Technical Explanation
The paper presents an asynchronous federated learning framework for vehicular edge computing. In this setting, vehicles on the road act as edge devices that collaboratively train a shared machine learning model.
To address Byzantine attacks in this asynchronous setting, the authors propose a vehicle selection method. This method evaluates the reliability of each vehicle's model updates and selects a subset of vehicles to participate in the aggregation step, excluding those deemed to be sending malicious updates.
The vehicle selection is based on a voting mechanism that compares each vehicle's update to the current global model. Vehicles whose updates deviate significantly from the consensus are identified as potential adversaries and excluded from the aggregation. This helps enhance the efficiency of multi-device federated learning by improving the robustness to Byzantine attacks.
The authors evaluate their approach using both synthetic and real-world datasets, simulating different Byzantine attack scenarios. The results show that their vehicle selection method outperforms existing approaches in terms of model accuracy and convergence speed, even when a significant portion of the vehicles are behaving maliciously.
Critical Analysis
The paper provides a valuable contribution to the field of federated learning in resource-constrained environments, addressing an important challenge of Byzantine attacks. The proposed vehicle selection method is a practical and effective solution for improving the robustness of asynchronous federated learning in vehicular edge computing.
However, the paper does not explore the scalability of the approach as the number of vehicles increases. The computational and communication overhead of the vehicle selection process may become a bottleneck as the system grows larger. Additionally, the paper assumes that vehicles can accurately detect malicious behavior in their peers, which may not always be the case in real-world deployments.
Further research could investigate techniques to optimize the communication and resource allocation in the federated learning process, as well as explore more advanced anomaly detection methods to improve the reliability of the vehicle selection.
Conclusion
This paper presents an effective solution for addressing Byzantine attacks in asynchronous federated learning for vehicular edge computing. By introducing a vehicle selection method that can identify and exclude malicious participants, the authors have improved the robustness and efficiency of the federated learning process.
The results demonstrate the potential of this approach to enable more reliable and accurate machine learning models in resource-constrained edge computing environments, with important implications for autonomous driving, smart transportation, and other IoT applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Anti-Byzantine Attacks Enabled Vehicle Selection for Asynchronous Federated Learning in Vehicular Edge Computing
Cui Zhang, Xiao Xu, Qiong Wu, Pingyi Fan, Qiang Fan, Huiling Zhu, Jiangzhou Wang
In vehicle edge computing (VEC), asynchronous federated learning (AFL) is used, where the edge receives a local model and updates the global model, effectively reducing the global aggregation latency.Due to different amounts of local data,computing capabilities and locations of the vehicles, renewing the global model with same weight is inappropriate.The above factors will affect the local calculation time and upload time of the local model, and the vehicle may also be affected by Byzantine attacks, leading to the deterioration of the vehicle data. However, based on deep reinforcement learning (DRL), we can consider these factors comprehensively to eliminate vehicles with poor performance as much as possible and exclude vehicles that have suffered Byzantine attacks before AFL. At the same time, when aggregating AFL, we can focus on those vehicles with better performance to improve the accuracy and safety of the system. In this paper, we proposed a vehicle selection scheme based on DRL in VEC. In this scheme, vehicle s mobility, channel conditions with temporal variations, computational resources with temporal variations, different data amount, transmission channel status of vehicles as well as Byzantine attacks were taken into account.Simulation results show that the proposed scheme effectively improves the safety and accuracy of the global model.
Read more4/15/2024
0
Adaptive and Parallel Split Federated Learning in Vehicular Edge Computing
Xianke Qiang, Zheng Chang, Yun Hu, Lei Liu, Timo Hamalainen
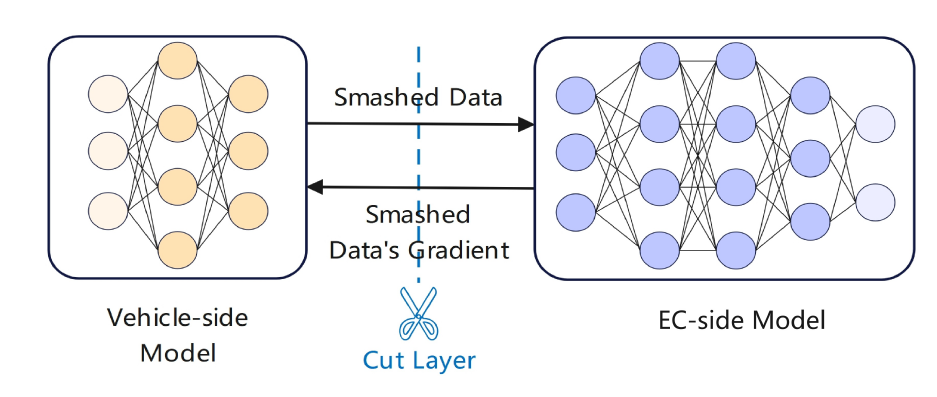
Vehicular edge intelligence (VEI) is a promising paradigm for enabling future intelligent transportation systems by accommodating artificial intelligence (AI) at the vehicular edge computing (VEC) system. Federated learning (FL) stands as one of the fundamental technologies facilitating collaborative model training locally and aggregation, while safeguarding the privacy of vehicle data in VEI. However, traditional FL faces challenges in adapting to vehicle heterogeneity, training large models on resource-constrained vehicles, and remaining susceptible to model weight privacy leakage. Meanwhile, split learning (SL) is proposed as a promising collaborative learning framework which can mitigate the risk of model wights leakage, and release the training workload on vehicles. SL sequentially trains a model between a vehicle and an edge cloud (EC) by dividing the entire model into a vehicle-side model and an EC-side model at a given cut layer. In this work, we combine the advantages of SL and FL to develop an Adaptive Split Federated Learning scheme for Vehicular Edge Computing (ASFV). The ASFV scheme adaptively splits the model and parallelizes the training process, taking into account mobile vehicle selection and resource allocation. Our extensive simulations, conducted on non-independent and identically distributed data, demonstrate that the proposed ASFV solution significantly reduces training latency compared to existing benchmarks, while adapting to network dynamics and vehicles' mobility.
Read more5/30/2024

0
DRL-Based Federated Self-Supervised Learning for Task Offloading and Resource Allocation in ISAC-Enabled Vehicle Edge Computing
Xueying Gu, Qiong Wu, Pingyi Fan, Nan Cheng, Wen Chen, Khaled B. Letaief
Intelligent Transportation Systems (ITS) leverage Integrated Sensing and Communications (ISAC) to enhance data exchange between vehicles and infrastructure in the Internet of Vehicles (IoV). This integration inevitably increases computing demands, risking real-time system stability. Vehicle Edge Computing (VEC) addresses this by offloading tasks to Road Side Unit (RSU), ensuring timely services. Our previous work FLSimCo algorithm, which uses local resources for Federated Self-Supervised Learning (SSL), though vehicles often can't complete all iterations task. Our improved algorithm offloads partial task to RSU and optimizes energy consumption by adjusting transmission power, CPU frequency, and task assignment ratios, balancing local and RSU-based training. Meanwhile, setting an offloading threshold further prevents inefficiencies. Simulation results show that the enhanced algorithm reduces energy consumption, improves offloading efficiency and the accuracy of Federated SSL.
Read more8/28/2024

0
Distributed Deep Reinforcement Learning Based Gradient Quantization for Federated Learning Enabled Vehicle Edge Computing
Cui Zhang, Wenjun Zhang, Qiong Wu, Pingyi Fan, Qiang Fan, Jiangzhou Wang, Khaled B. Letaief
Federated Learning (FL) can protect the privacy of the vehicles in vehicle edge computing (VEC) to a certain extent through sharing the gradients of vehicles' local models instead of local data. The gradients of vehicles' local models are usually large for the vehicular artificial intelligence (AI) applications, thus transmitting such large gradients would cause large per-round latency. Gradient quantization has been proposed as one effective approach to reduce the per-round latency in FL enabled VEC through compressing gradients and reducing the number of bits, i.e., the quantization level, to transmit gradients. The selection of quantization level and thresholds determines the quantization error, which further affects the model accuracy and training time. To do so, the total training time and quantization error (QE) become two key metrics for the FL enabled VEC. It is critical to jointly optimize the total training time and QE for the FL enabled VEC. However, the time-varying channel condition causes more challenges to solve this problem. In this paper, we propose a distributed deep reinforcement learning (DRL)-based quantization level allocation scheme to optimize the long-term reward in terms of the total training time and QE. Extensive simulations identify the optimal weighted factors between the total training time and QE, and demonstrate the feasibility and effectiveness of the proposed scheme.
Read more7/12/2024