Anytime Replanning of Robot Coverage Paths for Partially Unknown Environments

0

Sign in to get full access
Overview
- This paper presents a method for anytime replanning of robot coverage paths in partially unknown environments.
- The proposed approach allows a robot to continuously update its coverage plan as it explores and discovers new information about its surroundings.
- The research aims to address the challenge of efficiently covering an area when the environment is not fully known in advance.
Plain English Explanation
Robot coverage path planning is about finding the best route for a robot to move around and fully cover a given area. This is important for applications like floor cleaning, lawn mowing, and search and rescue operations.
Anytime Replanning of Robot Coverage Paths for Partially Unknown Environments focuses on situations where the robot doesn't have complete information about its environment upfront. As the robot explores and discovers new obstacles or open spaces, it needs to continuously update its coverage plan to be as efficient as possible.
The key idea is to allow the robot to replan its path at any time, rather than sticking to a fixed plan. This "anytime replanning" approach lets the robot quickly adapt to new information and avoid getting stuck in inefficient routes. By constantly refining its plan, the robot can cover the entire area in the most efficient way possible.
This is particularly useful in dynamic or partially unknown environments, where the robot may encounter unexpected obstacles or find shortcuts that weren't apparent at the start. The ability to replan on the fly helps the robot navigate these changing conditions effectively.
Technical Explanation
The paper presents an "anytime replanning" approach for robot coverage path planning in partially unknown environments. The core of the method is a multi-stage planning algorithm that:
- Generates an initial coverage path based on the robot's current knowledge of the environment.
- Continuously monitors the robot's progress and detects when replanning is necessary, such as when new obstacles are discovered.
- Efficiently recomputes a new coverage path that adapts to the updated environmental information.
The replanning process is designed to be fast and responsive, allowing the robot to update its plan quickly without significantly interrupting its coverage task. The authors leverage techniques like incremental graph search and hierarchical planning to achieve this efficiency.
The proposed method is evaluated through simulation and real-world experiments, demonstrating its ability to outperform traditional coverage planning approaches in terms of coverage time and path length. The results show the benefits of the anytime replanning strategy, particularly in environments with a high degree of uncertainty or dynamic changes.
Learning Coverage Paths in Unknown Environments with Deep Reinforcement Learning and Mobile Robot Sensory Coverage in 2-D Environments are other relevant works that explore related challenges in robot coverage planning.
Critical Analysis
The anytime replanning approach presented in this paper addresses an important practical challenge in robot coverage planning. By continuously adapting the robot's path as new information is discovered, the method can achieve more efficient coverage in partially unknown or dynamic environments.
One potential limitation is the computational cost of the replanning process, which could become a bottleneck in very large or complex environments. The authors mention that their hierarchical planning technique helps mitigate this, but further optimization may be needed for real-time applications with strict time constraints.
Additionally, the paper focuses on 2D environments and does not consider more complex 3D scenarios, such as coverage tasks in multi-story buildings or uneven terrain. Extending the approach to handle these additional challenges could be an area for future research.
Real-Time Motion Planning for Autonomous Vehicles in Dynamic Environments is an example of research that tackles motion planning in 3D environments with dynamic obstacles, which could provide insights for extending the coverage planning approach.
Conclusion
This paper presents a novel anytime replanning strategy for robot coverage path planning in partially unknown environments. By continuously updating the robot's coverage plan as new information is discovered, the proposed method can achieve more efficient coverage compared to traditional approaches.
The ability to quickly adapt to changing conditions and unexpected obstacles makes this approach particularly useful for real-world applications, where the environment is often not fully known in advance. The demonstrated improvements in coverage time and path length suggest that the anytime replanning strategy could have a significant impact on the efficiency and practicality of robot coverage tasks.
Further research to optimize the computational performance and extend the method to handle more complex 3D environments could help broaden the applicability of this important technique in the field of mobile robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Anytime Replanning of Robot Coverage Paths for Partially Unknown Environments
Megnath Ramesh, Frank Imeson, Baris Fidan, Stephen L. Smith
In this paper, we propose a method to replan coverage paths for a robot operating in an environment with initially unknown static obstacles. Existing coverage approaches reduce coverage time by covering along the minimum number of coverage lines (straight-line paths). However, recomputing such paths online can be computationally expensive resulting in robot stoppages that increase coverage time. A naive alternative is greedy detour replanning, i.e., replanning with minimum deviation from the initial path, which is efficient to compute but may result in unnecessary detours. In this work, we propose an anytime coverage replanning approach named OARP-Replan that performs near-optimal replans to an interrupted coverage path within a given time budget. We do this by solving linear relaxations of integer linear programs (ILPs) to identify sections of the interrupted path that can be optimally replanned within the time budget. We validate OARP-Replan in simulation and perform comparisons against a greedy detour replanner and other state-of-the-art coverage planners. We also demonstrate OARP-Replan in experiments using an industrial-level autonomous robot.
Read more6/10/2024

0
Hierarchical Large Scale Multirobot Path (Re)Planning
Lishuo Pan, Kevin Hsu, Nora Ayanian
We consider a large-scale multi-robot path planning problem in a cluttered environment. Our approach achieves real-time replanning by dividing the workspace into cells and utilizing a hierarchical planner. Specifically, multi-commodity flow-based high-level planners route robots through the cells to reduce congestion, while an anytime low-level planner computes collision-free paths for robots within each cell in parallel. Despite resulting in longer paths compared to the baseline multi-agent pathfinding algorithm, our method produces a solution with significant improvement in computation time. Specifically, we show empirical results of a 500-times speedup in computation time compared to the baseline multi-agent pathfinding approach on the environments we study. We account for the robot's embodiment and support non-stop execution when replanning continuously. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 32 physical Crazyflie nano-quadrotor experiment.
Read more7/4/2024
0
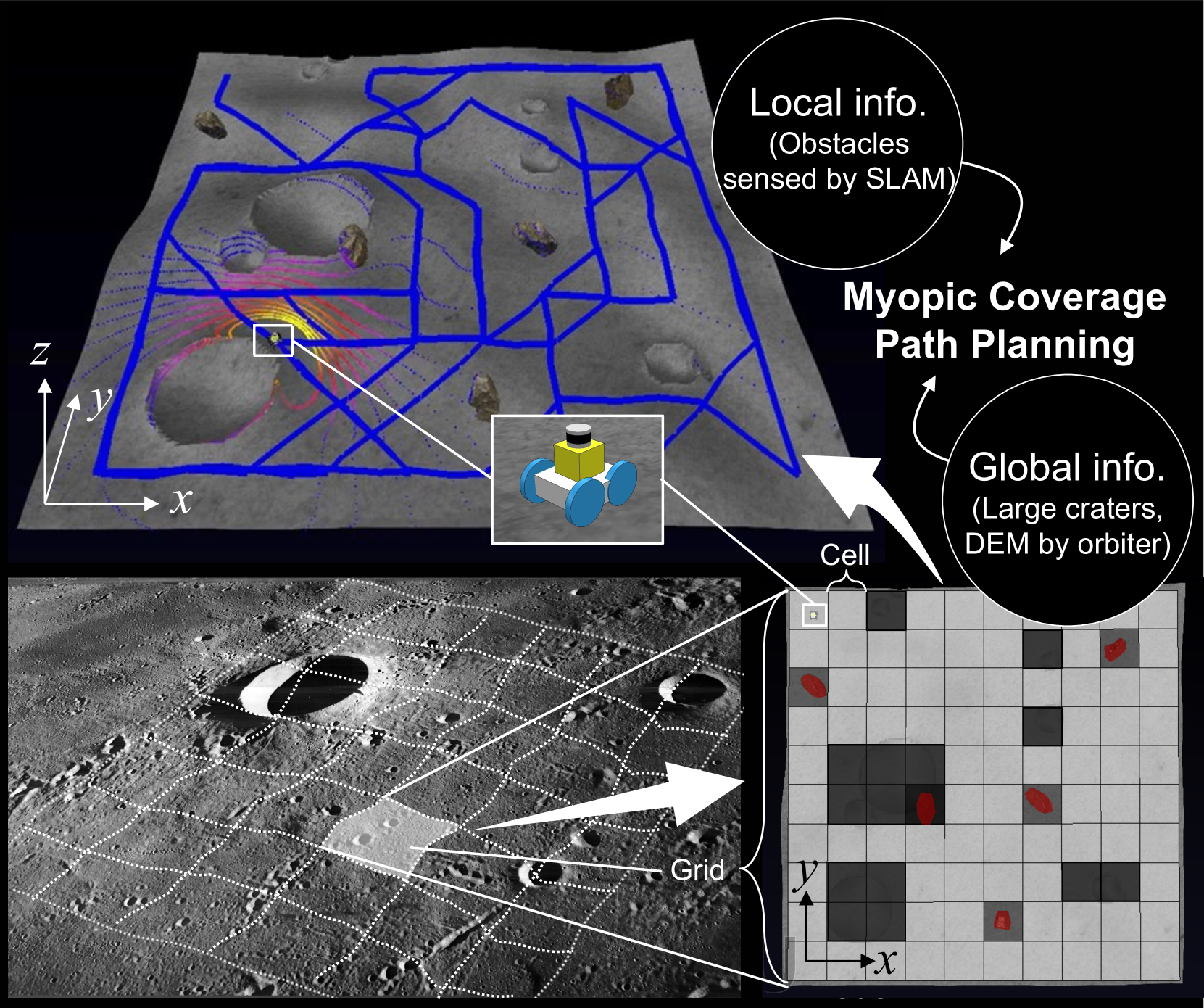
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Shreya Santra, Kentaro Uno, Gen Kudo, Kazuya Yoshida
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
Read more4/30/2024

0
Learning Coverage Paths in Unknown Environments with Deep Reinforcement Learning
Arvi Jonnarth, Jie Zhao, Michael Felsberg
Coverage path planning (CPP) is the problem of finding a path that covers the entire free space of a confined area, with applications ranging from robotic lawn mowing to search-and-rescue. When the environment is unknown, the path needs to be planned online while mapping the environment, which cannot be addressed by offline planning methods that do not allow for a flexible path space. We investigate how suitable reinforcement learning is for this challenging problem, and analyze the involved components required to efficiently learn coverage paths, such as action space, input feature representation, neural network architecture, and reward function. We propose a computationally feasible egocentric map representation based on frontiers, and a novel reward term based on total variation to promote complete coverage. Through extensive experiments, we show that our approach surpasses the performance of both previous RL-based approaches and highly specialized methods across multiple CPP variations.
Read more6/10/2024