Hierarchical Large Scale Multirobot Path (Re)Planning

0

Sign in to get full access
Overview
- This paper presents a hierarchical approach for large-scale multi-robot path (re)planning, which aims to enable efficient and scalable coordination among a large number of robots.
- The proposed system utilizes a hierarchical structure to decompose the planning problem into smaller subproblems, allowing for parallel computation and reduced overall complexity.
- The researchers demonstrate the effectiveness of their approach through simulation experiments and real-world deployments, showcasing its ability to handle dynamic environments and adapt to changing conditions.
Plain English Explanation
The paper describes a new way to plan and coordinate the movements of many robots working together. The researchers recognized that as the number of robots increases, the complexity of planning their paths becomes very challenging. To address this, they developed a hierarchical approach that breaks the overall planning problem into smaller, more manageable pieces.
At the highest level, the system divides the environment into regions and assigns robots to different regions. Within each region, the robots plan their individual paths, taking into account the paths of other robots in that region. This parallel planning, where robots in different regions plan independently, helps to reduce the overall computational complexity.
The hierarchical structure also allows the system to quickly adapt to changes in the environment or new tasks. If something changes, the robots in the affected regions can replan their paths without having to redo the planning for the entire system. This makes the system more flexible and responsive.
The researchers tested their approach through computer simulations and real-world experiments, demonstrating its ability to effectively coordinate large numbers of robots in dynamic and complex environments. By breaking the problem into smaller pieces and allowing for parallel planning, this hierarchical approach aims to enable efficient and scalable multi-robot coordination, which could have applications in areas like warehouse automation, disaster response, and autonomous transportation.
Technical Explanation
The researchers propose a hierarchical large-scale multi-robot path (re)planning approach to address the challenge of coordinating a large number of robots. The system utilizes a hierarchical structure to decompose the overall planning problem into smaller subproblems, which can be solved in parallel to reduce computational complexity.
At the highest level, the environment is divided into regions, and robots are assigned to different regions. Within each region, the robots plan their individual paths, taking into account the paths of other robots in that region. This parallel planning approach helps to reduce the overall planning time and enables the system to quickly adapt to changes in the environment or new tasks.
The researchers also incorporate a multilayered motion planning strategy, where robots plan their paths at different levels of abstraction, from global to local. This hierarchical planning process allows the system to balance global optimality and local responsiveness.
Through simulation experiments and real-world deployments, the researchers demonstrate the effectiveness of their approach in handling dynamic environments and adapting to changing conditions. The hierarchical structure enables efficient and scalable coordination, even with a large number of robots, making it a promising approach for applications such as warehouse automation, disaster response, and autonomous transportation.
Critical Analysis
The paper presents a well-designed hierarchical approach to multi-robot path planning that addresses the scalability challenges associated with coordinating a large number of robots. The researchers have thoughtfully incorporated several key elements, such as parallel planning, multilayered motion planning, and dynamic adaptation, which contribute to the system's efficiency and flexibility.
One potential limitation of the approach is the assumption of a known and static environment. In real-world scenarios, the environment may be more dynamic, with unpredictable obstacles or changes that could affect the planned paths. While the system's ability to replan paths in response to changes is a strength, further research may be needed to explore its performance in highly unpredictable environments.
Additionally, the paper does not provide a detailed analysis of the computational complexity or optimality guarantees of the hierarchical planning algorithm. It would be valuable to understand the trade-offs between the gains in scalability and any potential loss in path optimality or completeness.
Finally, the paper focuses on simulation and limited real-world experiments. Broader deployment and evaluation in diverse real-world scenarios, such as different types of environments or with varying numbers of robots, could help validate the approach's practical applicability and identify any additional challenges or limitations.
Overall, the hierarchical multi-robot path planning approach presented in this paper is a promising step towards enabling efficient and scalable coordination of large-scale robotic systems. Further research and development in this area could lead to significant advancements in the field of multi-robot coordination, with potential applications in a wide range of domains.
Conclusion
This paper introduces a hierarchical approach for large-scale multi-robot path (re)planning, which aims to enable efficient and scalable coordination among a large number of robots. The proposed system utilizes a hierarchical structure to decompose the planning problem into smaller subproblems, allowing for parallel computation and reduced overall complexity.
The researchers demonstrate the effectiveness of their approach through simulation experiments and real-world deployments, showcasing its ability to handle dynamic environments and adapt to changing conditions. The hierarchical structure, combined with parallel planning and multilayered motion planning strategies, allows the system to balance global optimality and local responsiveness, making it a promising approach for applications such as warehouse automation, disaster response, and autonomous transportation.
While the paper presents a well-designed solution, further research is needed to explore the approach's performance in highly unpredictable environments and to provide a more detailed analysis of its computational complexity and optimality guarantees. Broader deployment and evaluation in diverse real-world scenarios could also help validate the practical applicability of the hierarchical multi-robot path planning approach.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Hierarchical Large Scale Multirobot Path (Re)Planning
Lishuo Pan, Kevin Hsu, Nora Ayanian
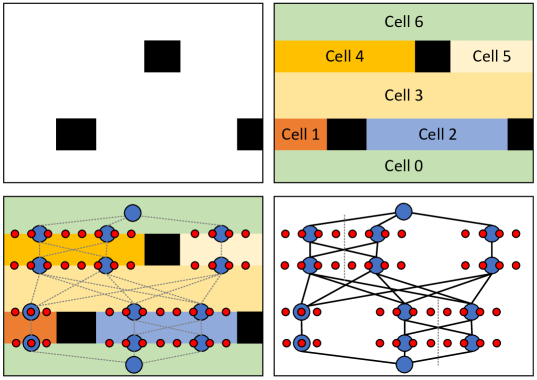
We consider a large-scale multi-robot path planning problem in a cluttered environment. Our approach achieves real-time replanning by dividing the workspace into cells and utilizing a hierarchical planner. Specifically, we propose novel multi-commodity flow-based high-level planners that route robots through cells with reduced congestion, along with an anytime low-level planner that computes collision-free paths for robots within each cell in parallel. A highlight of our method is a significant improvement in computation time. Specifically, we show empirical results of a 500-times speedup in computation time compared to the baseline multi-agent pathfinding approach on the environments we study. We account for the robot's embodiment and support non-stop execution with continuous replanning. We demonstrate the real-time performance of our algorithm with up to 142 robots in simulation, and a representative 32 physical Crazyflie nano-quadrotor experiment.
Read more9/25/2024
0
Flow-Inspired Lightweight Multi-Robot Real-Time Scheduling Planner
Han Liu, Yu Jin, Tianjiang Hu, Kai Huang
Collision avoidance and trajectory planning are crucial in multi-robot systems, particularly in environments with numerous obstacles. Although extensive research has been conducted in this field, the challenge of rapid traversal through such environments has not been fully addressed. This paper addresses this problem by proposing a novel real-time scheduling scheme designed to optimize the passage of multi-robot systems through complex, obstacle-rich maps. Inspired from network flow optimization, our scheme decomposes the environment into a network structure, enabling the efficient allocation of robots to paths based on real-time congestion data. The proposed scheduling planner operates on top of existing collision avoidance algorithms, focusing on minimizing traversal time by balancing robot detours and waiting times. Our simulation results demonstrate the efficiency of the proposed scheme. Additionally, we validated its effectiveness through real world flight tests using ten quadrotors. This work contributes a lightweight, effective scheduling planner capable of meeting the real-time demands of multi-robot systems in obstacle-rich environments.
Read more9/12/2024
🧪
0
Scalable Multi-Robot Motion Planning Using Guidance-Informed Hypergraphs
Courtney McBeth, James Motes, Isaac Ngui, Marco Morales, Nancy M. Amato
In this work, we present a multi-robot planning framework that leverages guidance about the problem to efficiently search the planning space. This guidance captures when coordination between robots is necessary, allowing us to decompose the intractably large multi-robot search space while limiting risk of inter-robot conflicts by composing relevant robot groups together while planning. Our framework additionally supports planning with kinodynamic constraints through our conflict resolution structure. This structure also improves the scalability of our approach by eliminating unnecessary work during the construction of motion solutions. We also provide an application of this framework to multiple mobile robot motion planning in congested environments using topological guidance. Our previous work has explored using topological guidance, which utilizes information about the robots' environment, in these multi-robot settings where a high degree of coordination is required of the full robot group. In real-world scenarios, this high level of coordination is not always necessary and results in excessive computational overhead. Here, we leverage our novel framework to achieve a significant improvement in scalability and show that our method efficiently finds paths for robot teams up to an order of magnitude larger than existing state-of-the-art methods in congested settings with narrow passages in the environment.
Read more7/2/2024
0
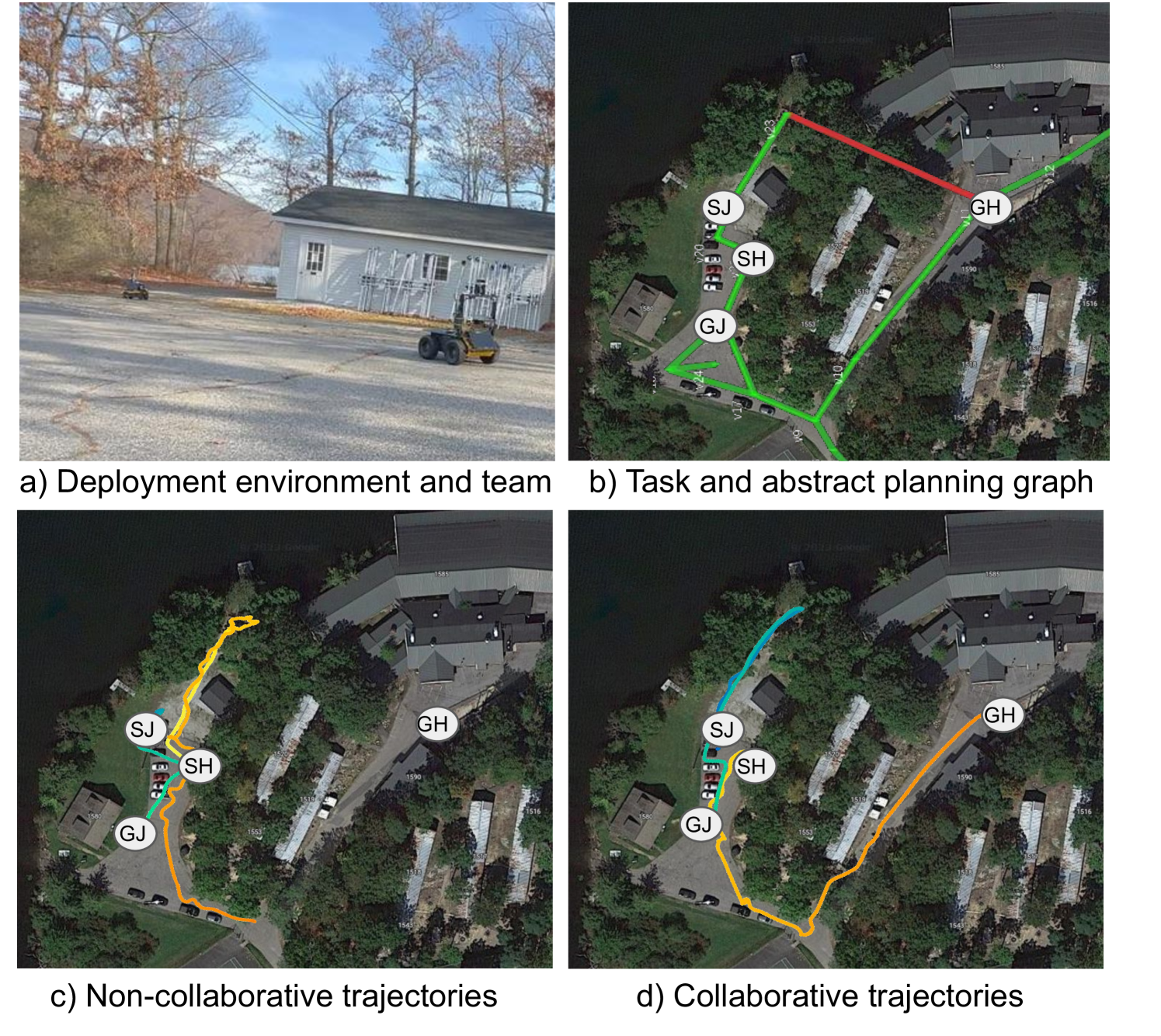
Real-World Deployment of a Hierarchical Uncertainty-Aware Collaborative Multiagent Planning System
Martina Stadler Kurtz, Samuel Prentice, Yasmin Veys, Long Quang, Carlos Nieto-Granda, Michael Novitzky, Ethan Stump, Nicholas Roy
We would like to enable a collaborative multiagent team to navigate at long length scales and under uncertainty in real-world environments. In practice, planning complexity scales with the number of agents in the team, with the length scale of the environment, and with environmental uncertainty. Enabling tractable planning requires developing abstract models that can represent complex, high-quality plans. However, such models often abstract away information needed to generate directly-executable plans for real-world agents in real-world environments, as planning in such detail, especially in the presence of real-world uncertainty, would be computationally intractable. In this paper, we describe the deployment of a planning system that used a hierarchy of planners to execute collaborative multiagent navigation tasks in real-world, unknown environments. By developing a planning system that was robust to failures at every level of the planning hierarchy, we enabled the team to complete collaborative navigation tasks, even in the presence of imperfect planning abstractions and real-world uncertainty. We deployed our approach on a Clearpath Husky-Jackal team navigating in a structured outdoor environment, and demonstrated that the system enabled the agents to successfully execute collaborative plans.
Read more4/29/2024