AONeuS: A Neural Rendering Framework for Acoustic-Optical Sensor Fusion

0
Sign in to get full access
Overview
• This paper presents AONeuS, a neural rendering framework for fusing acoustic and optical sensor data to improve underwater mapping and localization.
• The framework combines sonar data, which provides detailed bathymetric information, with camera imagery to generate photorealistic 3D reconstructions of the seafloor.
• The key innovations include neural network architectures for aligning and blending the sensor modalities, as well as specialized loss functions to preserve important geometric and visual details.
Plain English Explanation
Exploring the underwater world is challenging, as traditional imaging techniques like cameras struggle with the murky, low-visibility conditions. However, sonar-based bathymetric mapping can provide highly accurate depth information about the seafloor.
The researchers behind AONeuS wanted to combine the strengths of sonar and cameras to create a more complete and visually engaging picture of the underwater environment. Their framework takes sonar data, which gives a detailed 3D map of the seafloor, and fuses it with camera imagery to generate photorealistic 3D reconstructions.
This is achieved through specialized neural network models that can align the different sensor modalities and blend them seamlessly. The researchers also developed custom loss functions to ensure that important geometric details from the sonar data and visual textures from the cameras are preserved in the final output.
The result is a system that can provide underwater explorers and researchers with highly accurate and visually striking 3D maps of the seafloor, which could be valuable for tasks like AUV localization and bathymetric mapping, photorealistic 3D mapping, and high-fidelity image synthesis.
Technical Explanation
The AONeuS framework combines two key components: a Neural Alignment Module (NAM) and a Neural Blending Module (NBM).
The NAM is responsible for aligning the sonar and camera data by learning a spatial transform to map the sonar depth maps onto the camera image plane. This ensures that the two sensor modalities are properly registered and can be fused seamlessly.
The NBM then takes the aligned sonar and camera data and blends them together using a convolutional neural network. The network learns to preserve important geometric details from the sonar data, such as seafloor structures and slopes, while also incorporating the visual textures and colors from the camera imagery.
The researchers developed custom loss functions to guide the training of these neural network components. For example, they included terms to encourage the NAM to preserve the overall depth structure and minimize distortions, while the NBM loss functions emphasized maintaining sharp edges and fine details from the sonar data.
Experiments on real-world underwater datasets demonstrated the effectiveness of the AONeuS framework, with the fused outputs showing significant improvements in both geometric accuracy and photorealistic appearance compared to using sonar or camera data alone.
Critical Analysis
The AONeuS framework represents a promising step towards combining acoustic and optical sensors for high-fidelity underwater mapping and visualization. By addressing the challenges of aligning and blending these disparate data sources, the researchers have opened up new possibilities for applications like AUV positioning and endoscopic image synthesis.
However, the paper does not extensively address some potential limitations and areas for future work. For example, the reliance on precise sensor calibration and registration could be a practical challenge in real-world deployments. Additionally, the performance of the framework in complex, dynamic underwater environments with changing lighting conditions and turbidity levels is not thoroughly explored.
Further research could also investigate extending the framework to handle a wider range of sensor modalities, such as incorporating additional sonar data types or leveraging simultaneous localization and mapping (SLAM) techniques to enable fully autonomous underwater exploration.
Conclusion
The AONeuS framework represents an important step forward in the field of underwater perception, combining the complementary strengths of acoustic and optical sensors to create high-fidelity 3D reconstructions of the seafloor. By addressing the challenges of aligning and blending these diverse data sources, the researchers have laid the groundwork for more immersive and informative underwater mapping and exploration.
While the current implementation has some limitations, the core ideas and techniques introduced in this paper hold significant promise for advancing the state of the art in areas like autonomous underwater vehicle (AUV) navigation, marine biology research, and underwater infrastructure inspection. As the field of underwater sensing and imaging continues to evolve, frameworks like AONeuS will likely play an increasingly important role in unlocking the full potential of this vital domain.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AONeuS: A Neural Rendering Framework for Acoustic-Optical Sensor Fusion
Mohamad Qadri, Kevin Zhang, Akshay Hinduja, Michael Kaess, Adithya Pediredla, Christopher A. Metzler
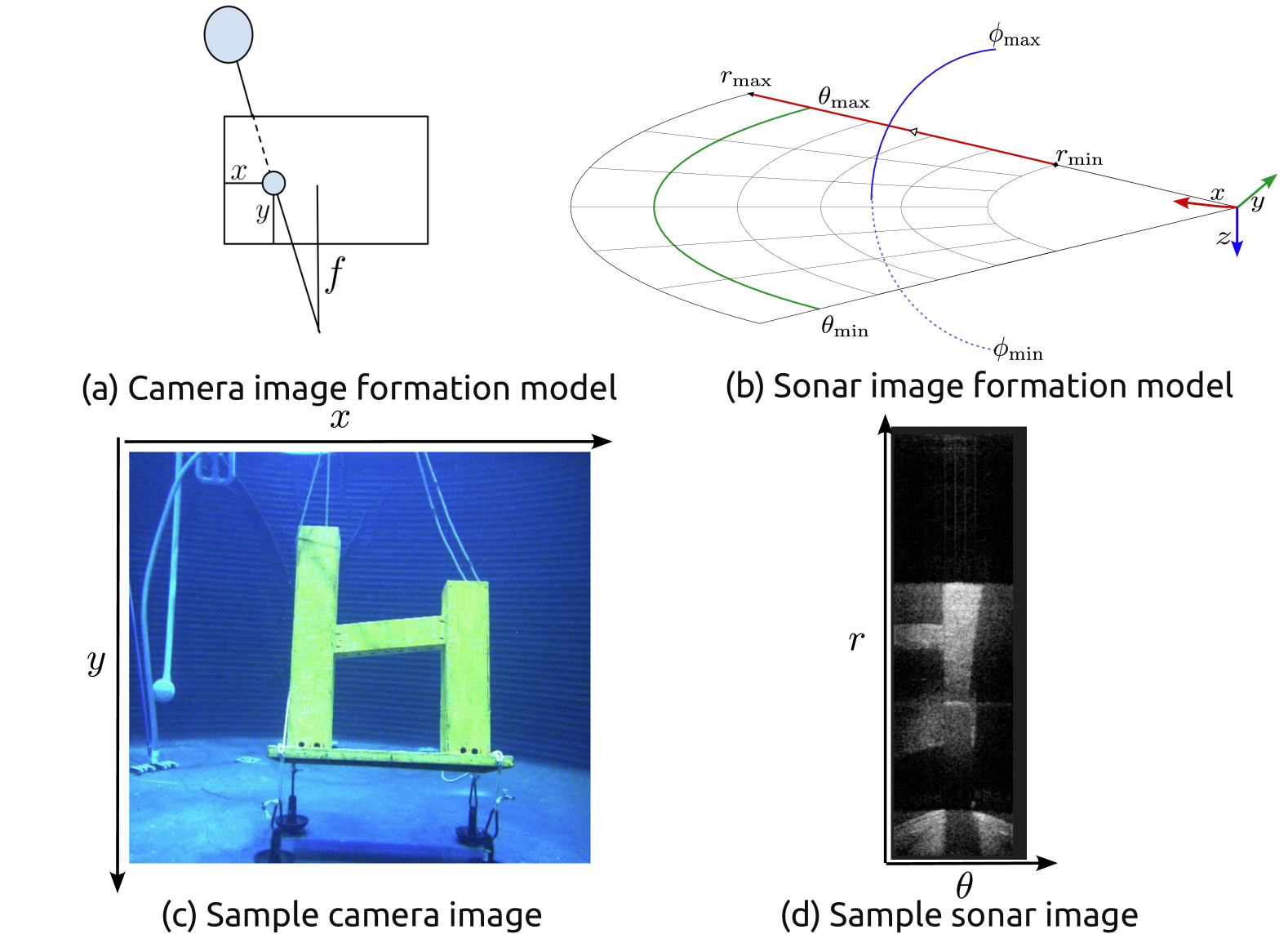
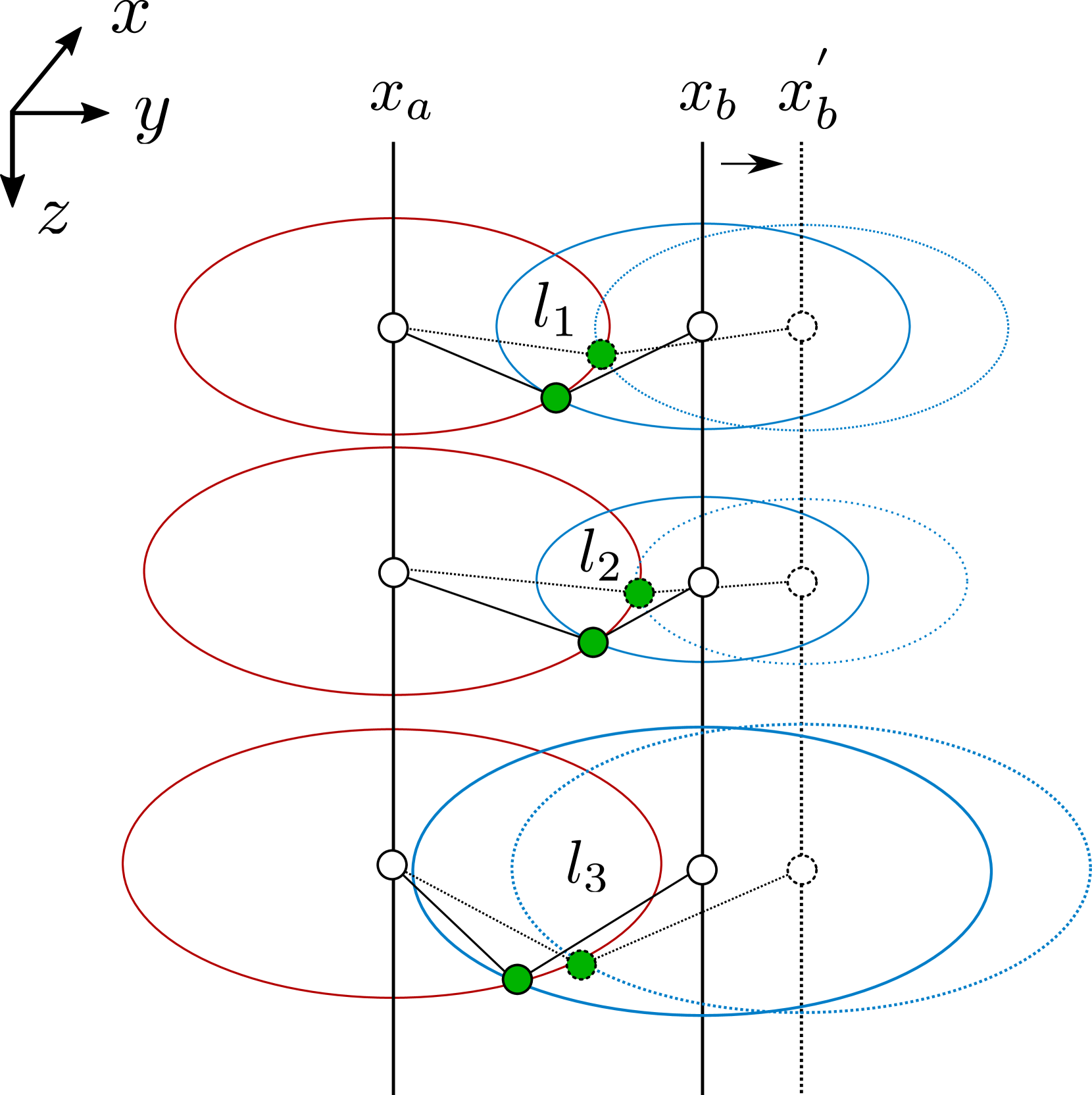
Underwater perception and 3D surface reconstruction are challenging problems with broad applications in construction, security, marine archaeology, and environmental monitoring. Treacherous operating conditions, fragile surroundings, and limited navigation control often dictate that submersibles restrict their range of motion and, thus, the baseline over which they can capture measurements. In the context of 3D scene reconstruction, it is well-known that smaller baselines make reconstruction more challenging. Our work develops a physics-based multimodal acoustic-optical neural surface reconstruction framework (AONeuS) capable of effectively integrating high-resolution RGB measurements with low-resolution depth-resolved imaging sonar measurements. By fusing these complementary modalities, our framework can reconstruct accurate high-resolution 3D surfaces from measurements captured over heavily-restricted baselines. Through extensive simulations and in-lab experiments, we demonstrate that AONeuS dramatically outperforms recent RGB-only and sonar-only inverse-differentiable-rendering--based surface reconstruction methods. A website visualizing the results of our paper is located at this address: https://aoneus.github.io/
Read more5/22/2024
0
NeuRSS: Enhancing AUV Localization and Bathymetric Mapping with Neural Rendering for Sidescan SLAM
Yiping Xie, Jun Zhang, Nils Bore, John Folkesson
Implicit neural representations and neural render- ing have gained increasing attention for bathymetry estimation from sidescan sonar (SSS). These methods incorporate multiple observations of the same place from SSS data to constrain the elevation estimate, converging to a globally-consistent bathymetric model. However, the quality and precision of the bathymetric estimate are limited by the positioning accuracy of the autonomous underwater vehicle (AUV) equipped with the sonar. The global positioning estimate of the AUV relying on dead reckoning (DR) has an unbounded error due to the absence of a geo-reference system like GPS underwater. To address this challenge, we propose in this letter a modern and scalable framework, NeuRSS, for SSS SLAM based on DR and loop closures (LCs) over large timescales, with an elevation prior provided by the bathymetric estimate using neural rendering from SSS. This framework is an iterative procedure that improves localization and bathymetric mapping. Initially, the bathymetry estimated from SSS using the DR estimate, though crude, can provide an important elevation prior in the nonlinear least-squares (NLS) optimization that estimates the relative pose between two loop-closure vertices in a pose graph. Subsequently, the global pose estimate from the SLAM component improves the positioning estimate of the vehicle, thus improving the bathymetry estimation. We validate our localization and mapping approach on two large surveys collected with a surface vessel and an AUV, respectively. We evaluate their localization results against the ground truth and compare the bathymetry estimation against data collected with multibeam echo sounders (MBES).
Read more5/10/2024

0
Framework for Robust Localization of UUVs and Mapping of Net Pens
David Botta, Luca Ebner, Andrej Studer, Victor Reijgwart, Roland Siegwart, Eleni Kelasidi
This paper presents a general framework integrating vision and acoustic sensor data to enhance localization and mapping in highly dynamic and complex underwater environments, with a particular focus on fish farming. The proposed pipeline is suited to obtain both the net-relative pose estimates of an Unmanned Underwater Vehicle (UUV) and the depth map of the net pen purely based on vision data. Furthermore, this paper presents a method to estimate the global pose of an UUV fusing the net-relative pose estimates with acoustic data. The pipeline proposed in this paper showcases results on datasets obtained from industrial-scale fish farms and successfully demonstrates that the vision-based TRU-Depth model, when provided with sparse depth priors from the FFT method and combined with the Wavemap method, can estimate both net-relative and global position of the UUV in real time and generate detailed 3D maps suitable for autonomous navigation and inspection purposes.
Read more9/25/2024
0
Mesh-based Photorealistic and Real-time 3D Mapping for Robust Visual Perception of Autonomous Underwater Vehicle
Jungwoo Lee, Younggun Cho
This paper proposes a photorealistic real-time dense 3D mapping system that utilizes a learning-based image enhancement method and mesh-based map representation. Due to the characteristics of the underwater environment, where problems such as hazing and low contrast occur, it is hard to apply conventional simultaneous localization and mapping (SLAM) methods. Furthermore, for sensitive tasks like inspecting cracks, photorealistic mapping is very important. However, the behavior of Autonomous Underwater Vehicle (AUV) is computationally constrained. In this paper, we utilize a neural network-based image enhancement method to improve pose estimation and mapping quality and apply a sliding window-based mesh expansion method to enable lightweight, fast, and photorealistic mapping. To validate our results, we utilize real-world and indoor synthetic datasets. We performed qualitative validation with the real-world dataset and quantitative validation by modeling images from the indoor synthetic dataset as underwater scenes.
Read more4/30/2024