Bathymetric Surveying with Imaging Sonar Using Neural Volume Rendering

0
🧠
Sign in to get full access
Overview
- This paper addresses the challenge of estimating seafloor bathymetry (depth) from forward-looking sonar (FLS) data
- Current approaches rely on either supervised learning with ground-truth labels or surface rendering based on the Lambertian assumption
- The paper proposes a novel, self-supervised framework for reconstructing bathymetry using FLS data collected during standard surveys
Plain English Explanation
The paper discusses a new way to estimate the depth of the seafloor using sonar data. Sonar is a technology that uses sound waves to detect and locate objects underwater. Current methods for using sonar to map the seafloor either require a lot of labeled training data or make some simplified assumptions about how the sound waves behave.
The researchers in this paper developed a new self-supervised approach that doesn't need as much labeled data. They represent the seafloor as a neural heightmap - a 3D model of the depth encoded in a neural network. They then use a differentiable renderer to simulate how the sonar would perceive this seafloor model. By comparing the simulated sonar data to the real sonar measurements, they can adjust the seafloor model to better match the real-world data, without needing labeled examples.
The key innovation is the way they model the sonar's beam patterns - how the sound waves spread out as they travel. By estimating the beam patterns alongside the seafloor depth, they can get more accurate bathymetry maps, especially in areas with complex seafloor features.
Technical Explanation
The paper proposes a self-supervised framework for reconstructing seafloor bathymetry from forward-looking sonar (FLS) data. The approach represents the seafloor as a neural heightmap - a parametric multi-resolution hash encoding of the 3D depth surface.
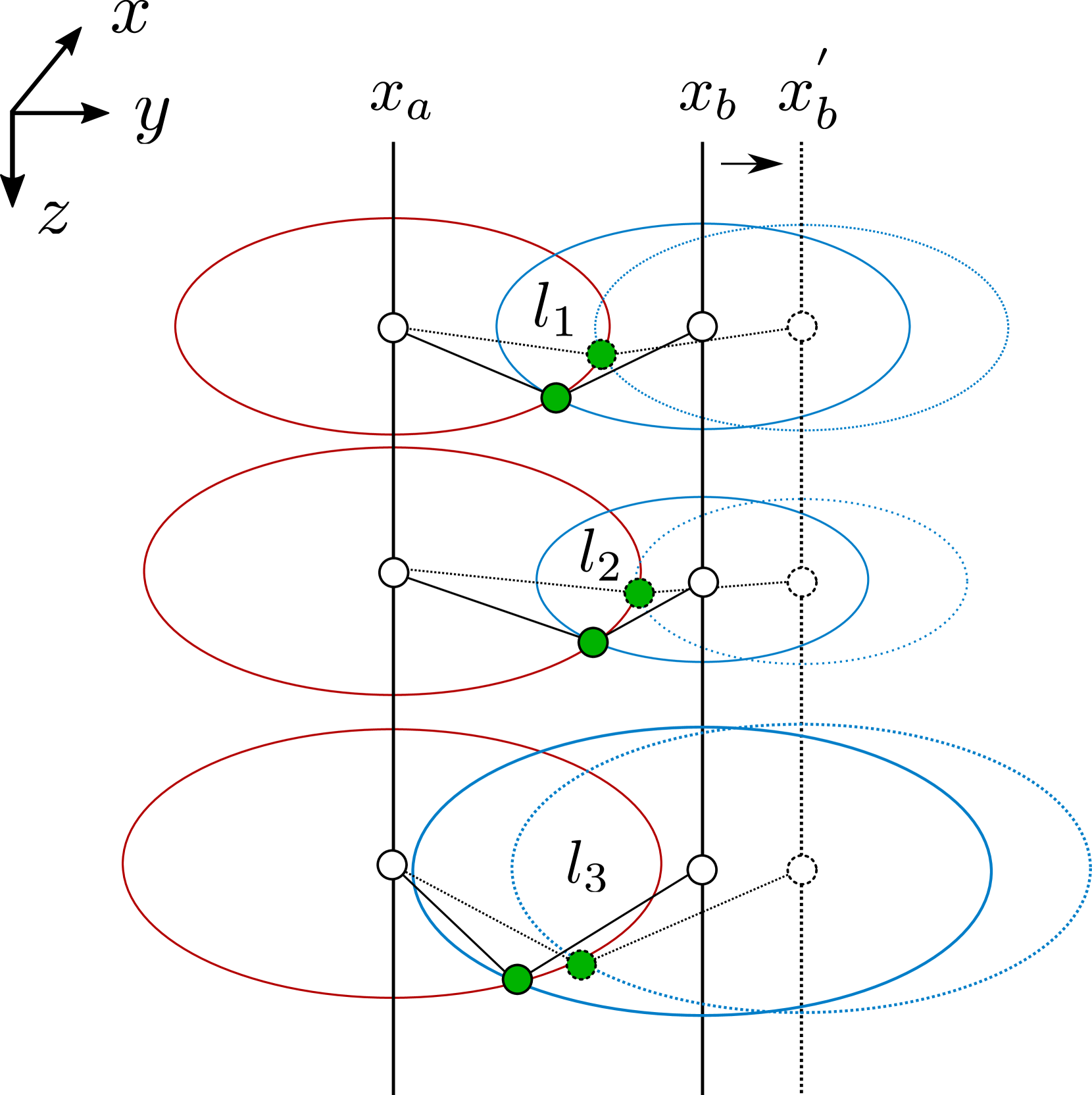
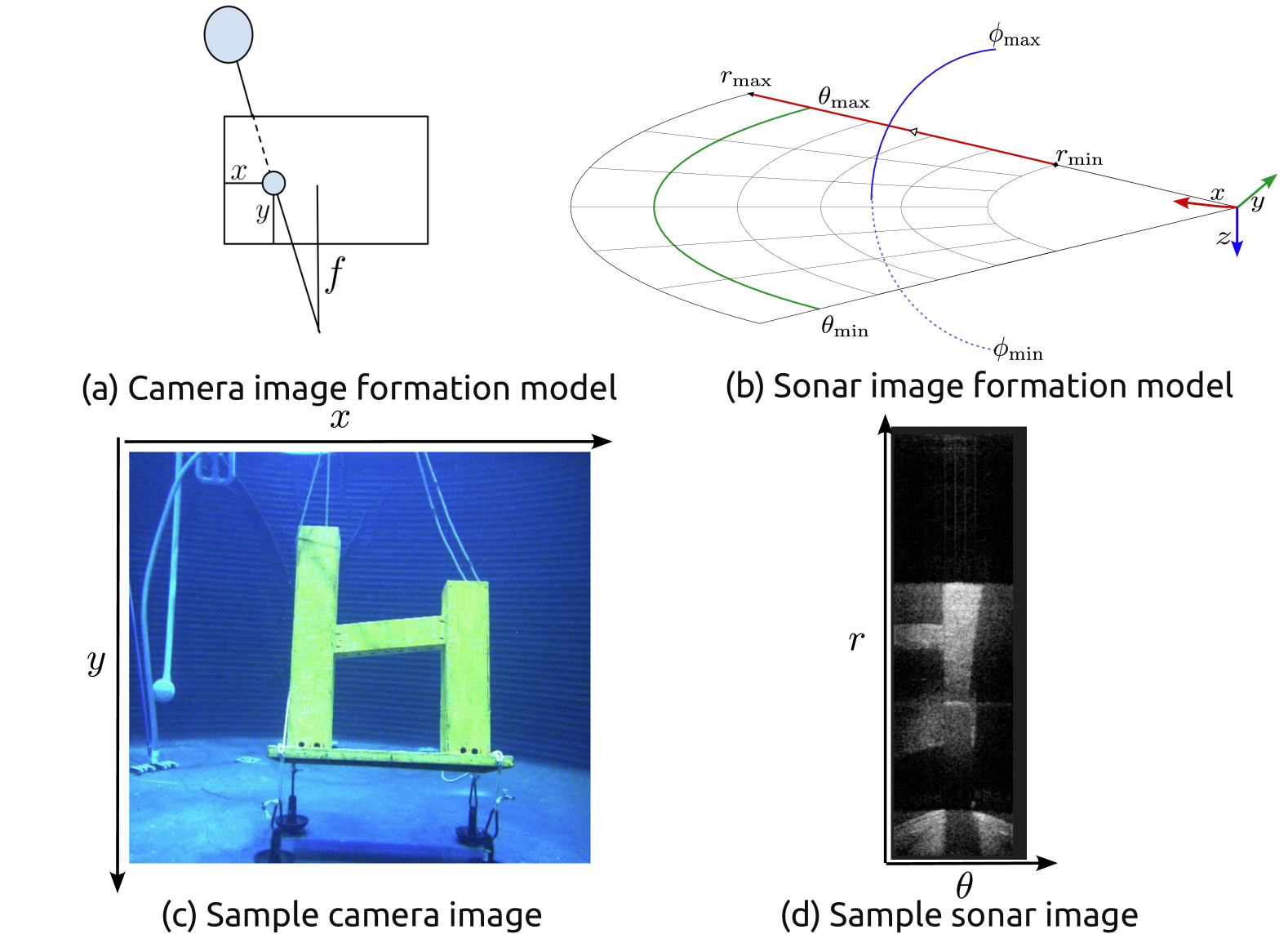
To model the sonar measurements, the researchers developed a differentiable renderer that simulates the sonar's volumetric rendering process, including hierarchical sampling techniques. This allows them to jointly estimate the seafloor heightmap and the horizontal and vertical beam patterns of the sonar.
The proposed method is evaluated on both simulated and real-world FLS data collected by remotely operated vehicles (ROVs) during low-altitude seafloor surveys. Results show that it outperforms current state-of-the-art approaches that use imaging sonars for seabed mapping. The researchers also demonstrate the potential to enhance low-resolution prior bathymetry maps using FLS data from low-altitude surveys.
Critical Analysis
The paper presents a promising self-supervised approach for reconstructing seafloor bathymetry from forward-looking sonar data. The key strengths are the use of a differentiable renderer to model the sonar measurements and the joint estimation of the seafloor heightmap and sonar beam patterns.
However, the paper does not address certain limitations and potential concerns. For example, the performance of the method may be sensitive to the quality and coverage of the input sonar data, which can be affected by factors like water turbidity, seafloor complexity, and vehicle maneuvering. Additionally, the computational cost and memory requirements of the neural heightmap representation and volumetric rendering process could be prohibitive for large-scale or real-time applications.
Further research could explore ways to address these limitations, such as incorporating uncertainty estimates, leveraging multi-modal sensor fusion, or developing more efficient neural representations and rendering algorithms. Validating the method's performance on a wider range of seafloor environments and real-world use cases would also help to assess its practical applicability.
Conclusion
This paper presents a novel self-supervised framework for reconstructing seafloor bathymetry from forward-looking sonar data. By jointly estimating the seafloor heightmap and sonar beam patterns using a differentiable volumetric renderer, the proposed method outperforms current state-of-the-art approaches for seabed mapping with imaging sonars.
The key innovation is the ability to leverage readily available sonar data from standard surveys, without requiring extensive ground-truth labels. This could potentially enable higher-resolution bathymetry maps to be generated more efficiently, with applications in areas like underwater navigation, marine habitat monitoring, and seafloor resource exploration.
While the paper demonstrates promising results, further research is needed to address potential limitations and expand the method's real-world applicability. Nonetheless, this work represents an important step forward in using self-supervised learning to improve seafloor mapping capabilities from imaging sonar data.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
0
Bathymetric Surveying with Imaging Sonar Using Neural Volume Rendering
Yiping Xie, Giancarlo Troni, Nils Bore, John Folkesson
This research addresses the challenge of estimating bathymetry from imaging sonars where the state-of-the-art works have primarily relied on either supervised learning with ground-truth labels or surface rendering based on the Lambertian assumption. In this letter, we propose a novel, self-supervised framework based on volume rendering for reconstructing bathymetry using forward-looking sonar (FLS) data collected during standard surveys. We represent the seafloor as a neural heightmap encapsulated with a parametric multi-resolution hash encoding scheme and model the sonar measurements with a differentiable renderer using sonar volumetric rendering employed with hierarchical sampling techniques. Additionally, we model the horizontal and vertical beam patterns and estimate them jointly with the bathymetry. We evaluate the proposed method quantitatively on simulation and field data collected by remotely operated vehicles (ROVs) during low-altitude surveys. Results show that the proposed method outperforms the current state-of-the-art approaches that use imaging sonars for seabed mapping. We also demonstrate that the proposed approach can potentially be used to increase the resolution of a low-resolution prior map with FLS data from low-altitude surveys.
Read more4/24/2024
0
NeuRSS: Enhancing AUV Localization and Bathymetric Mapping with Neural Rendering for Sidescan SLAM
Yiping Xie, Jun Zhang, Nils Bore, John Folkesson
Implicit neural representations and neural render- ing have gained increasing attention for bathymetry estimation from sidescan sonar (SSS). These methods incorporate multiple observations of the same place from SSS data to constrain the elevation estimate, converging to a globally-consistent bathymetric model. However, the quality and precision of the bathymetric estimate are limited by the positioning accuracy of the autonomous underwater vehicle (AUV) equipped with the sonar. The global positioning estimate of the AUV relying on dead reckoning (DR) has an unbounded error due to the absence of a geo-reference system like GPS underwater. To address this challenge, we propose in this letter a modern and scalable framework, NeuRSS, for SSS SLAM based on DR and loop closures (LCs) over large timescales, with an elevation prior provided by the bathymetric estimate using neural rendering from SSS. This framework is an iterative procedure that improves localization and bathymetric mapping. Initially, the bathymetry estimated from SSS using the DR estimate, though crude, can provide an important elevation prior in the nonlinear least-squares (NLS) optimization that estimates the relative pose between two loop-closure vertices in a pose graph. Subsequently, the global pose estimate from the SLAM component improves the positioning estimate of the vehicle, thus improving the bathymetry estimation. We validate our localization and mapping approach on two large surveys collected with a surface vessel and an AUV, respectively. We evaluate their localization results against the ground truth and compare the bathymetry estimation against data collected with multibeam echo sounders (MBES).
Read more5/10/2024
🖼️
0
SONIC: Sonar Image Correspondence using Pose Supervised Learning for Imaging Sonars
Samiran Gode, Akshay Hinduja, Michael Kaess
In this paper, we address the challenging problem of data association for underwater SLAM through a novel method for sonar image correspondence using learned features. We introduce SONIC (SONar Image Correspondence), a pose-supervised network designed to yield robust feature correspondence capable of withstanding viewpoint variations. The inherent complexity of the underwater environment stems from the dynamic and frequently limited visibility conditions, restricting vision to a few meters of often featureless expanses. This makes camera-based systems suboptimal in most open water application scenarios. Consequently, multibeam imaging sonars emerge as the preferred choice for perception sensors. However, they too are not without their limitations. While imaging sonars offer superior long-range visibility compared to cameras, their measurements can appear different from varying viewpoints. This inherent variability presents formidable challenges in data association, particularly for feature-based methods. Our method demonstrates significantly better performance in generating correspondences for sonar images which will pave the way for more accurate loop closure constraints and sonar-based place recognition. Code as well as simulated and real-world datasets will be made public to facilitate further development in the field.
Read more5/15/2024
0
AONeuS: A Neural Rendering Framework for Acoustic-Optical Sensor Fusion
Mohamad Qadri, Kevin Zhang, Akshay Hinduja, Michael Kaess, Adithya Pediredla, Christopher A. Metzler
Underwater perception and 3D surface reconstruction are challenging problems with broad applications in construction, security, marine archaeology, and environmental monitoring. Treacherous operating conditions, fragile surroundings, and limited navigation control often dictate that submersibles restrict their range of motion and, thus, the baseline over which they can capture measurements. In the context of 3D scene reconstruction, it is well-known that smaller baselines make reconstruction more challenging. Our work develops a physics-based multimodal acoustic-optical neural surface reconstruction framework (AONeuS) capable of effectively integrating high-resolution RGB measurements with low-resolution depth-resolved imaging sonar measurements. By fusing these complementary modalities, our framework can reconstruct accurate high-resolution 3D surfaces from measurements captured over heavily-restricted baselines. Through extensive simulations and in-lab experiments, we demonstrate that AONeuS dramatically outperforms recent RGB-only and sonar-only inverse-differentiable-rendering--based surface reconstruction methods. A website visualizing the results of our paper is located at this address: https://aoneus.github.io/
Read more5/22/2024