Application of Gated Recurrent Units for CT Trajectory Optimization

0
Sign in to get full access
Overview
- This paper explores the use of Gated Recurrent Units (GRUs) for optimizing the trajectory of a robotic Computed Tomography (CT) scanner.
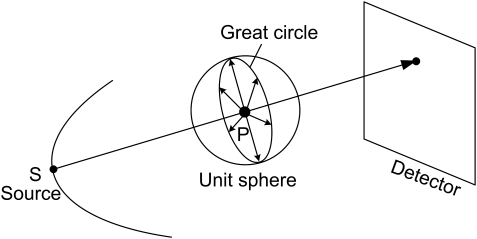
- The goal is to ensure the scanner collects complete and high-quality data that satisfies the Tuy condition, which is a key requirement for accurate 3D image reconstruction.
- The authors propose a GRU-based model to predict the optimal next position for the scanner based on its current position and previous trajectory.
Plain English Explanation
The researchers in this study were looking at how to improve the way a robotic CT scanner moves and collects data. CT scanners are used to take 3D images of the inside of the body, but to get a high-quality image, the scanner has to collect data from many different angles around the patient. The researchers wanted to find a way to automatically plan the best path for the scanner to follow to collect all the necessary data.
They used a type of artificial intelligence called a Gated Recurrent Unit (GRU) to predict the optimal next position for the scanner based on where it was currently and where it had been before. GRUs are a kind of neural network that can remember and use information from previous steps, which is helpful for planning a trajectory.
The key requirement for a good CT scan is that the data collected has to satisfy the "Tuy condition", which means the scanner has to move in a way that allows it to see the whole 3D structure from different angles. The researchers' GRU-based model was designed to plan a scanner trajectory that would meet this Tuy condition and result in a complete, high-quality 3D image.
Technical Explanation
The paper proposes a Gated Recurrent Unit (GRU)-based model for optimizing the trajectory of a robotic Computed Tomography (CT) scanner. The goal is to ensure the scanner collects complete and high-quality data that satisfies the Tuy condition, which is a key requirement for accurate 3D image reconstruction.
The authors formulate the problem as a sequential decision-making task, where the model predicts the optimal next position for the scanner based on its current position and previous trajectory. The GRU architecture is well-suited for this, as it can effectively capture long-range dependencies in the scanner's motion.
The model takes as input the current position and orientation of the scanner, as well as features extracted from the previous trajectory. It then outputs the predicted optimal next position for the scanner. The model is trained end-to-end using a dataset of simulated scanner trajectories.
Experiments demonstrate that the GRU-based model outperforms baseline methods in terms of meeting the Tuy condition and achieving high-quality 3D reconstruction. The authors also analyze the model's ability to generalize to unseen scenarios and discuss potential extensions, such as incorporating additional sensor modalities.
Critical Analysis
The paper presents a promising approach for optimizing the trajectory of a robotic CT scanner, but there are a few potential limitations and areas for further research:
- The experiments were conducted on simulated data, so it will be important to validate the model's performance on real-world CT scanning setups. [link to efficient data-driven scene simulation paper]
- The authors only consider the Tuy condition as the objective, but other factors like scan time and radiation dose may also be important considerations in practice.
- The GRU-based model is a black-box approach, so it may be difficult to interpret the reasoning behind its trajectory predictions. Incorporating more explainable AI techniques could enhance the model's transparency. [link to GRANP paper]
Additionally, the paper does not address potential safety and ethical concerns related to the use of autonomous robotic CT scanners, such as issues around data privacy and the responsibility for any errors or malfunctions during the scanning process. These are important considerations that should be explored in future research.
Conclusion
This paper demonstrates the promising application of Gated Recurrent Units for optimizing the trajectory of a robotic CT scanner to collect complete and high-quality data. By learning to predict the optimal next position for the scanner, the GRU-based model can help ensure that the Tuy condition is satisfied, leading to accurate 3D image reconstruction.
While further validation on real-world data and consideration of additional practical factors are needed, this work represents an important step towards more efficient and autonomous CT scanning systems. As the field of medical robotics continues to advance, research like this could have significant implications for improving patient care and streamlining clinical workflows.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Application of Gated Recurrent Units for CT Trajectory Optimization
Yuedong Yuan, Linda-Sophie Schneider, Andreas Maier
Recent advances in computed tomography (CT) imaging, especially with dual-robot systems, have introduced new challenges for scan trajectory optimization. This paper presents a novel approach using Gated Recurrent Units (GRUs) to optimize CT scan trajectories. Our approach exploits the flexibility of robotic CT systems to select projections that enhance image quality by improving resolution and contrast while reducing scan time. We focus on cone-beam CT and employ several projection-based metrics, including absorption, pixel intensities, contrast-to-noise ratio, and data completeness. The GRU network aims to minimize data redundancy and maximize completeness with a limited number of projections. We validate our method using simulated data of a test specimen, focusing on a specific voxel of interest. The results show that the GRU-optimized scan trajectories can outperform traditional circular CT trajectories in terms of image quality metrics. For the used specimen, SSIM improves from 0.38 to 0.49 and CNR increases from 6.97 to 9.08. This finding suggests that the application of GRU in CT scan trajectory optimization can lead to more efficient, cost-effective, and high-quality imaging solutions.
Read more5/16/2024

0
SGRU: A High-Performance Structured Gated Recurrent Unit for Traffic Flow Prediction
Wenfeng Zhang, Xin Li, Anqi Li, Xiaoting Huang, Ti Wang, Honglei Gao
Traffic flow prediction is an essential task in constructing smart cities and is a typical Multivariate Time Series (MTS) Problem. Recent research has abandoned Gated Recurrent Units (GRU) and utilized dilated convolutions or temporal slicing for feature extraction, and they have the following drawbacks: (1) Dilated convolutions fail to capture the features of adjacent time steps, resulting in the loss of crucial transitional data. (2) The connections within the same temporal slice are strong, while the connections between different temporal slices are too loose. In light of these limitations, we emphasize the importance of analyzing a complete time series repeatedly and the crucial role of GRU in MTS. Therefore, we propose SGRU: Structured Gated Recurrent Units, which involve structured GRU layers and non-linear units, along with multiple layers of time embedding to enhance the model's fitting performance. We evaluate our approach on four publicly available California traffic datasets: PeMS03, PeMS04, PeMS07, and PeMS08 for regression prediction. Experimental results demonstrate that our model outperforms baseline models with average improvements of 11.7%, 18.6%, 18.5%, and 12.0% respectively.
Read more4/19/2024

0
Synthetic Trajectory Generation Through Convolutional Neural Networks
Jesse Merhi, Erik Buchholz, Salil S. Kanhere
Location trajectories provide valuable insights for applications from urban planning to pandemic control. However, mobility data can also reveal sensitive information about individuals, such as political opinions, religious beliefs, or sexual orientations. Existing privacy-preserving approaches for publishing this data face a significant utility-privacy trade-off. Releasing synthetic trajectory data generated through deep learning offers a promising solution. Due to the trajectories' sequential nature, most existing models are based on recurrent neural networks (RNNs). However, research in generative adversarial networks (GANs) largely employs convolutional neural networks (CNNs) for image generation. This discrepancy raises the question of whether advances in computer vision can be applied to trajectory generation. In this work, we introduce a Reversible Trajectory-to-CNN Transformation (RTCT) that adapts trajectories into a format suitable for CNN-based models. We integrated this transformation with the well-known DCGAN in a proof-of-concept (PoC) and evaluated its performance against an RNN-based trajectory GAN using four metrics across two datasets. The PoC was superior in capturing spatial distributions compared to the RNN model but had difficulty replicating sequential and temporal properties. Although the PoC's utility is not sufficient for practical applications, the results demonstrate the transformation's potential to facilitate the use of CNNs for trajectory generation, opening up avenues for future research. To support continued research, all source code has been made available under an open-source license.
Read more7/25/2024

0
Rethinking Iterative Stereo Matching from Diffusion Bridge Model Perspective
Yuguang Shi
Recently, iteration-based stereo matching has shown great potential. However, these models optimize the disparity map using RNN variants. The discrete optimization process poses a challenge of information loss, which restricts the level of detail that can be expressed in the generated disparity map. In order to address these issues, we propose a novel training approach that incorporates diffusion models into the iterative optimization process. We designed a Time-based Gated Recurrent Unit (T-GRU) to correlate temporal and disparity outputs. Unlike standard recurrent units, we employ Agent Attention to generate more expressive features. We also designed an attention-based context network to capture a large amount of contextual information. Experiments on several public benchmarks show that we have achieved competitive stereo matching performance. Our model ranks first in the Scene Flow dataset, achieving over a 7% improvement compared to competing methods, and requires only 8 iterations to achieve state-of-the-art results.
Read more4/16/2024