Synthetic Trajectory Generation Through Convolutional Neural Networks

0

Sign in to get full access
Overview
- This paper presents a method for generating synthetic trajectories using convolutional neural networks (CNNs).
- The goal is to create realistic-looking trajectory data that preserves privacy while maintaining utility for tasks like urban planning and traffic management.
- The authors develop a CNN-based architecture that can generate synthetic trajectories with similar statistical properties to real-world data.
Plain English Explanation
The paper tackles the challenge of Trajectory Privacy, which is the issue of how to share location data from people's movements without compromising their privacy. The researchers propose using Deep Learning techniques, specifically Convolutional Neural Networks, to generate synthetic trajectory data that has the same statistical properties as real data, but without revealing the actual locations of individual people.
The key idea is to train the neural network on real trajectory data, then use it to create new, fake trajectories that look realistic but don't correspond to any real people's movements. This allows the data to be shared and used for applications like urban planning and traffic management, without breaching people's Location Privacy.
The authors demonstrate that their Generative Adversarial Network-based approach can generate synthetic trajectories that are statistically similar to real data, while providing strong privacy guarantees.
Technical Explanation
The paper presents a deep learning framework for generating synthetic trajectories that preserve the statistical properties of real-world data. The core of the approach is a Convolutional Neural Network (CNN) architecture that takes in raw trajectory data and learns to generate new, realistic-looking trajectories.
The key components of the framework include:
- Preprocessing: The authors preprocess the raw trajectory data by encoding it as fixed-size grid-based representations that capture both spatial and temporal information.
- Generator Network: The core of the system is a CNN-based generator network that takes the preprocessed data as input and outputs new synthetic trajectories. The generator is trained in an adversarial fashion against a discriminator network.
- Discriminator Network: The discriminator network tries to distinguish between real and synthetic trajectories, providing feedback to the generator to improve its output.
The authors evaluate their approach on real-world trajectory datasets, demonstrating that the generated synthetic data closely matches the statistical properties of the original data, including metrics like trajectory length distribution, speed distribution, and spatial density. Crucially, the synthetic data provides strong Differential Privacy guarantees, ensuring that individual identities are protected.
Critical Analysis
The paper presents a well-designed and thorough approach to the important problem of generating privacy-preserving synthetic trajectory data. The authors make several key contributions:
- Developing a CNN-based architecture that can effectively capture the spatial and temporal patterns in real-world trajectory data.
- Employing a GAN-based training approach to ensure the generated trajectories are statistically indistinguishable from real data.
- Providing a rigorous privacy analysis and demonstrating strong differential privacy guarantees for the synthetic data.
However, the paper also acknowledges some limitations and areas for future work:
- The experiments are conducted on relatively small-scale datasets, and the authors suggest scaling up to larger, more diverse datasets.
- The current framework assumes trajectories are independent and does not model social interactions or group dynamics, which could be an interesting future extension.
- The privacy guarantees are provided at the dataset level, and the authors suggest exploring trajectory-level privacy protections as future work.
Overall, this paper makes a valuable contribution to the field of Trajectory Privacy and Synthetic Data Generation, providing a principled approach to balancing privacy and utility in location-based applications.
Conclusion
This paper presents a novel deep learning framework for generating synthetic trajectories that preserve the statistical properties of real-world data while providing strong privacy guarantees. By leveraging Convolutional Neural Networks and Generative Adversarial Networks, the authors demonstrate the ability to create realistic-looking synthetic trajectories that can be used for a variety of applications, such as urban planning and traffic management, without compromising individual privacy.
The technical contributions and rigorous evaluation make this a significant advancement in the field of Trajectory Privacy and Synthetic Data Generation. The insights and methods presented in this paper could have far-reaching implications for how location-based data is managed and shared in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Synthetic Trajectory Generation Through Convolutional Neural Networks
Jesse Merhi, Erik Buchholz, Salil S. Kanhere
Location trajectories provide valuable insights for applications from urban planning to pandemic control. However, mobility data can also reveal sensitive information about individuals, such as political opinions, religious beliefs, or sexual orientations. Existing privacy-preserving approaches for publishing this data face a significant utility-privacy trade-off. Releasing synthetic trajectory data generated through deep learning offers a promising solution. Due to the trajectories' sequential nature, most existing models are based on recurrent neural networks (RNNs). However, research in generative adversarial networks (GANs) largely employs convolutional neural networks (CNNs) for image generation. This discrepancy raises the question of whether advances in computer vision can be applied to trajectory generation. In this work, we introduce a Reversible Trajectory-to-CNN Transformation (RTCT) that adapts trajectories into a format suitable for CNN-based models. We integrated this transformation with the well-known DCGAN in a proof-of-concept (PoC) and evaluated its performance against an RNN-based trajectory GAN using four metrics across two datasets. The PoC was superior in capturing spatial distributions compared to the RNN model but had difficulty replicating sequential and temporal properties. Although the PoC's utility is not sufficient for practical applications, the results demonstrate the transformation's potential to facilitate the use of CNNs for trajectory generation, opening up avenues for future research. To support continued research, all source code has been made available under an open-source license.
Read more7/25/2024

0
SoK: Can Trajectory Generation Combine Privacy and Utility?
Erik Buchholz, Alsharif Abuadbba, Shuo Wang, Surya Nepal, Salil S. Kanhere
While location trajectories represent a valuable data source for analyses and location-based services, they can reveal sensitive information, such as political and religious preferences. Differentially private publication mechanisms have been proposed to allow for analyses under rigorous privacy guarantees. However, the traditional protection schemes suffer from a limiting privacy-utility trade-off and are vulnerable to correlation and reconstruction attacks. Synthetic trajectory data generation and release represent a promising alternative to protection algorithms. While initial proposals achieve remarkable utility, they fail to provide rigorous privacy guarantees. This paper proposes a framework for designing a privacy-preserving trajectory publication approach by defining five design goals, particularly stressing the importance of choosing an appropriate Unit of Privacy. Based on this framework, we briefly discuss the existing trajectory protection approaches, emphasising their shortcomings. This work focuses on the systematisation of the state-of-the-art generative models for trajectories in the context of the proposed framework. We find that no existing solution satisfies all requirements. Thus, we perform an experimental study evaluating the applicability of six sequential generative models to the trajectory domain. Finally, we conclude that a generative trajectory model providing semantic guarantees remains an open research question and propose concrete next steps for future research.
Read more6/28/2024
0
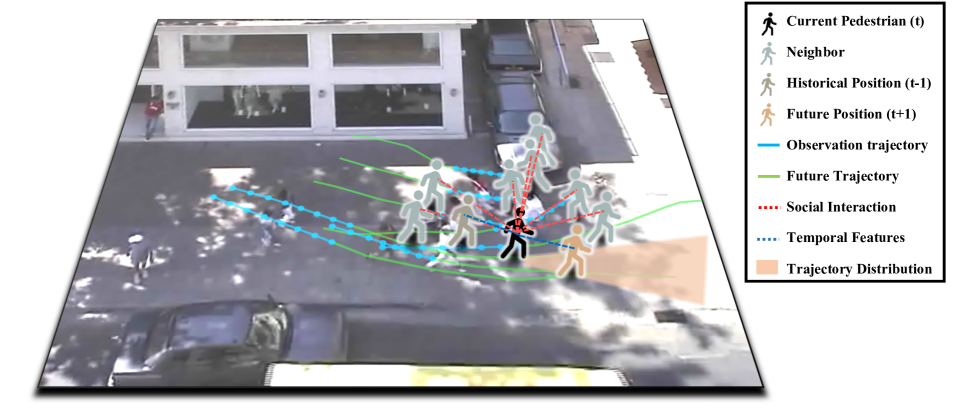
Attention-aware Social Graph Transformer Networks for Stochastic Trajectory Prediction
Yao Liu, Binghao Li, Xianzhi Wang, Claude Sammut, Lina Yao
Trajectory prediction is fundamental to various intelligent technologies, such as autonomous driving and robotics. The motion prediction of pedestrians and vehicles helps emergency braking, reduces collisions, and improves traffic safety. Current trajectory prediction research faces problems of complex social interactions, high dynamics and multi-modality. Especially, it still has limitations in long-time prediction. We propose Attention-aware Social Graph Transformer Networks for multi-modal trajectory prediction. We combine Graph Convolutional Networks and Transformer Networks by generating stable resolution pseudo-images from Spatio-temporal graphs through a designed stacking and interception method. Furthermore, we design the attention-aware module to handle social interaction information in scenarios involving mixed pedestrian-vehicle traffic. Thus, we maintain the advantages of the Graph and Transformer, i.e., the ability to aggregate information over an arbitrary number of neighbors and the ability to perform complex time-dependent data processing. We conduct experiments on datasets involving pedestrian, vehicle, and mixed trajectories, respectively. Our results demonstrate that our model minimizes displacement errors across various metrics and significantly reduces the likelihood of collisions. It is worth noting that our model effectively reduces the final displacement error, illustrating the ability of our model to predict for a long time.
Read more5/14/2024

0
Revisiting CNNs for Trajectory Similarity Learning
Zhihao Chang, Linzhu Yu, Huan Li, Sai Wu, Gang Chen, Dongxiang Zhang
Similarity search is a fundamental but expensive operator in querying trajectory data, due to its quadratic complexity of distance computation. To mitigate the computational burden for long trajectories, neural networks have been widely employed for similarity learning and each trajectory is encoded as a high-dimensional vector for similarity search with linear complexity. Given the sequential nature of trajectory data, previous efforts have been primarily devoted to the utilization of RNNs or Transformers. In this paper, we argue that the common practice of treating trajectory as sequential data results in excessive attention to capturing long-term global dependency between two sequences. Instead, our investigation reveals the pivotal role of local similarity, prompting a revisit of simple CNNs for trajectory similarity learning. We introduce ConvTraj, incorporating both 1D and 2D convolutions to capture sequential and geo-distribution features of trajectories, respectively. In addition, we conduct a series of theoretical analyses to justify the effectiveness of ConvTraj. Experimental results on three real-world large-scale datasets demonstrate that ConvTraj achieves state-of-the-art accuracy in trajectory similarity search. Owing to the simple network structure of ConvTraj, the training and inference speed on the Porto dataset with 1.6 million trajectories are increased by at least $240$x and $2.16$x, respectively. The source code and dataset can be found at textit{url{https://github.com/Proudc/ConvTraj}}.
Read more5/31/2024