ASID: Active Exploration for System Identification in Robotic Manipulation
2404.12308
0
0

Abstract
Model-free control strategies such as reinforcement learning have shown the ability to learn control strategies without requiring an accurate model or simulator of the world. While this is appealing due to the lack of modeling requirements, such methods can be sample inefficient, making them impractical in many real-world domains. On the other hand, model-based control techniques leveraging accurate simulators can circumvent these challenges and use a large amount of cheap simulation data to learn controllers that can effectively transfer to the real world. The challenge with such model-based techniques is the requirement for an extremely accurate simulation, requiring both the specification of appropriate simulation assets and physical parameters. This requires considerable human effort to design for every environment being considered. In this work, we propose a learning system that can leverage a small amount of real-world data to autonomously refine a simulation model and then plan an accurate control strategy that can be deployed in the real world. Our approach critically relies on utilizing an initial (possibly inaccurate) simulator to design effective exploration policies that, when deployed in the real world, collect high-quality data. We demonstrate the efficacy of this paradigm in identifying articulation, mass, and other physical parameters in several challenging robotic manipulation tasks, and illustrate that only a small amount of real-world data can allow for effective sim-to-real transfer. Project website at https://weirdlabuw.github.io/asid
Create account to get full access
Overview
- This research paper presents a novel method called ASID (Active Exploration for System Identification in Robotic Manipulation) for efficiently learning the dynamics models of robotic manipulation tasks.
- ASID combines active exploration techniques with Bayesian optimization to enable robots to autonomously discover informative actions that help identify the underlying system dynamics.
- The proposed approach is evaluated on several simulated manipulation tasks, demonstrating its ability to learn accurate models with significantly fewer interactions compared to standard exploration methods.
Plain English Explanation
ASID: Active Exploration for System Identification in Robotic Manipulation is a research paper that introduces a new way for robots to learn about the physical world around them.
Robots often need to understand the dynamics, or how things move and interact, of the objects they're trying to manipulate. This is called "system identification." The challenge is that it can take a lot of trial-and-error for a robot to figure out these dynamics through experimentation alone.
The ASID method tries to solve this by having the robot actively explore its environment in a more strategic way. It uses a technique called Bayesian optimization to quickly identify the most informative actions the robot can take to learn the dynamics efficiently.
This allows the robot to build an accurate model of the system dynamics with far fewer interactions compared to traditional exploration methods. The researchers tested ASID on several simulated manipulation tasks, and found it outperformed standard approaches.
The key idea is to have the robot intelligently plan its exploration, rather than just randomly trying different actions. This "active learning" approach is an important step towards enabling robots to learn and adapt more autonomously in the real world.
Technical Explanation
ASID: Active Exploration for System Identification in Robotic Manipulation presents a novel method for efficiently learning models of the dynamics governing robotic manipulation tasks.
The core idea is to combine active exploration techniques with Bayesian optimization to enable a robot to autonomously discover informative actions that help identify the underlying system dynamics. Specifically, the robot maintains a probabilistic belief over the unknown dynamics, which it uses to select the most informative actions to perform.
By focusing exploration on the regions of the state-action space that are most uncertain, the robot can learn accurate dynamics models with significantly fewer interactions compared to standard exploration methods, such as random sampling or grid-based exploration.
The authors evaluate ASID on several simulated robotic manipulation tasks, including block pushing, door opening, and object grasping. The results demonstrate that ASID outperforms these baseline approaches, requiring up to an order of magnitude fewer interactions to achieve comparable model accuracy.
This work builds on prior research in active exploration for Bayesian model-based reinforcement learning and skill discovery and transfer from simulation to the real world. By enabling robots to learn dynamics models more efficiently, ASID represents an important step towards adaptive and self-learning robots that can rapidly acquire new skills and adapt to novel environments.
Critical Analysis
The ASID method presented in this paper is an innovative approach to system identification for robotic manipulation tasks. By incorporating active exploration and Bayesian optimization, the researchers have demonstrated a significant improvement in sample efficiency compared to standard exploration techniques.
However, the evaluation is limited to simulation-based experiments, and the authors acknowledge that further work is needed to apply ASID in real-world settings. Factors such as sensor noise, modeling errors, and the complexity of real-world dynamics may pose additional challenges that were not captured in the simulated environments.
Additionally, the paper does not provide a detailed analysis of ASID's sensitivity to hyperparameter tuning or the robustness of the method to changes in the task or environment. Exploring these aspects would be important for understanding the practical applicability and limitations of the approach.
Another potential area for further research is the integration of ASID with more advanced control and planning algorithms. By tightly coupling the system identification process with higher-level decision-making, robots may be able to explore their environments even more efficiently and adapt to novel situations more effectively.
Overall, this paper presents a promising step towards more autonomous and adaptable robotic systems. Further development and real-world validation of the ASID method could have significant implications for improving the data efficiency and versatility of robotic manipulation.
Conclusion
The ASID method introduced in this paper represents an important advancement in the field of robotic system identification. By combining active exploration and Bayesian optimization, the researchers have demonstrated a significant improvement in the sample efficiency of learning accurate dynamics models for robotic manipulation tasks.
This work has the potential to enable robots to acquire new skills and adapt to changing environments more rapidly, which is a crucial step towards more autonomous and capable robotic systems. Further development and real-world validation of the ASID method could have far-reaching implications for a wide range of robotic applications, from industrial automation to personal assistive devices.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
Active Learning for Control-Oriented Identification of Nonlinear Systems
Bruce D. Lee, Ingvar Ziemann, George J. Pappas, Nikolai Matni
0
0
Model-based reinforcement learning is an effective approach for controlling an unknown system. It is based on a longstanding pipeline familiar to the control community in which one performs experiments on the environment to collect a dataset, uses the resulting dataset to identify a model of the system, and finally performs control synthesis using the identified model. As interacting with the system may be costly and time consuming, targeted exploration is crucial for developing an effective control-oriented model with minimal experimentation. Motivated by this challenge, recent work has begun to study finite sample data requirements and sample efficient algorithms for the problem of optimal exploration in model-based reinforcement learning. However, existing theory and algorithms are limited to model classes which are linear in the parameters. Our work instead focuses on models with nonlinear parameter dependencies, and presents the first finite sample analysis of an active learning algorithm suitable for a general class of nonlinear dynamics. In certain settings, the excess control cost of our algorithm achieves the optimal rate, up to logarithmic factors. We validate our approach in simulation, showcasing the advantage of active, control-oriented exploration for controlling nonlinear systems.
4/16/2024
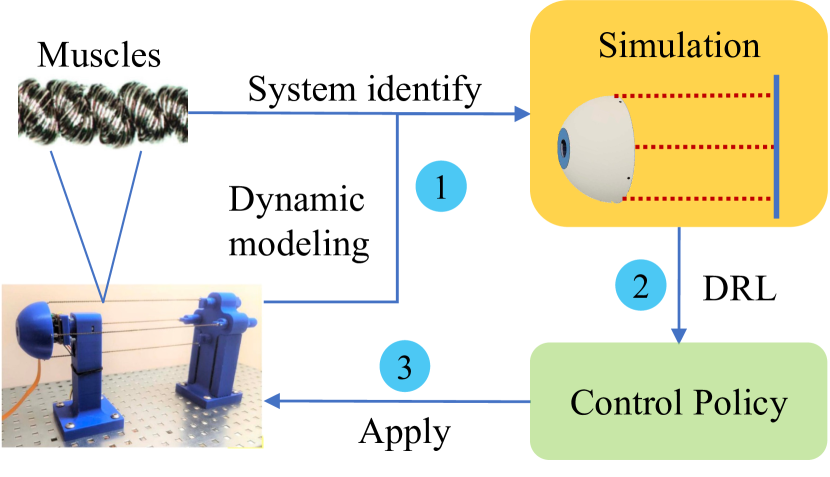
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
0
0
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
6/10/2024
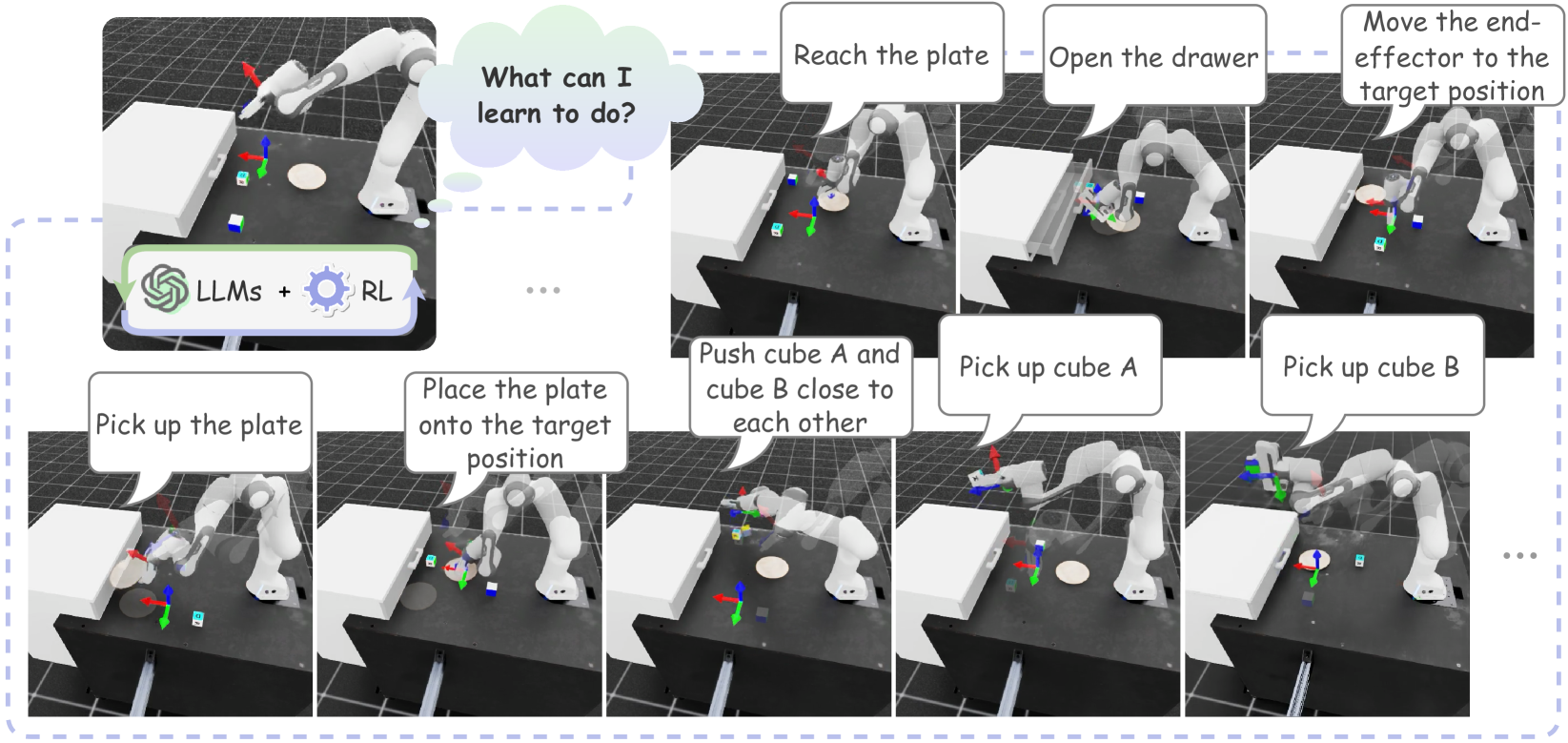
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
0
0
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
5/27/2024
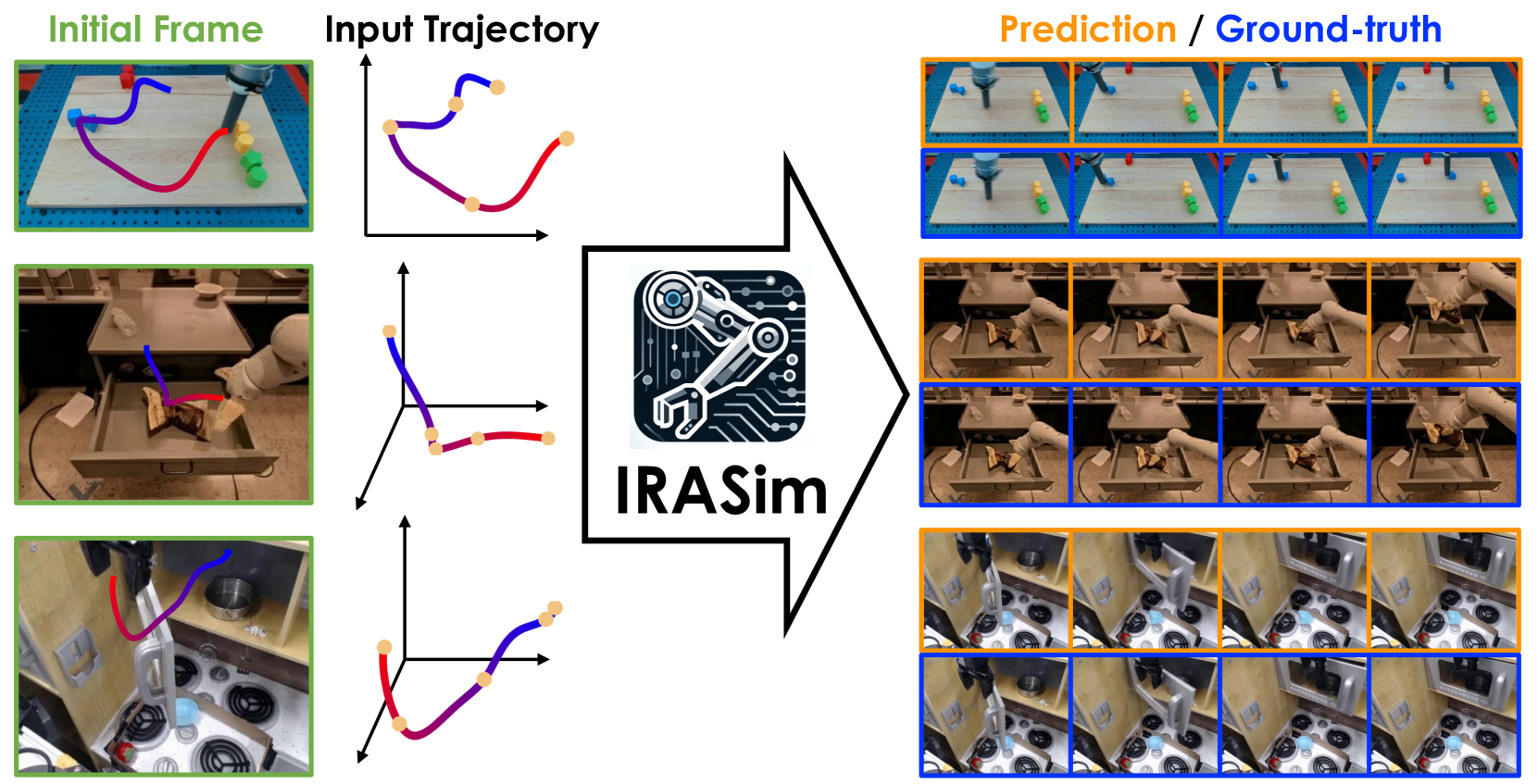
IRASim: Learning Interactive Real-Robot Action Simulators
Fangqi Zhu, Hongtao Wu, Song Guo, Yuxiao Liu, Chilam Cheang, Tao Kong
0
0
Scalable robot learning in the real world is limited by the cost and safety issues of real robots. In addition, rolling out robot trajectories in the real world can be time-consuming and labor-intensive. In this paper, we propose to learn an interactive real-robot action simulator as an alternative. We introduce a novel method, IRASim, which leverages the power of generative models to generate extremely realistic videos of a robot arm that executes a given action trajectory, starting from an initial given frame. To validate the effectiveness of our method, we create a new benchmark, IRASim Benchmark, based on three real-robot datasets and perform extensive experiments on the benchmark. Results show that IRASim outperforms all the baseline methods and is more preferable in human evaluations. We hope that IRASim can serve as an effective and scalable approach to enhance robot learning in the real world. To promote research for generative real-robot action simulators, we open-source code, benchmark, and checkpoints at https: //gen-irasim.github.io.
6/21/2024