IRASim: Learning Interactive Real-Robot Action Simulators

0
Sign in to get full access
Overview
- The paper presents IRASim, a learning-based approach for creating interactive, real-robot action simulators.
- The goal is to enable faster and more effective training of robotic manipulation skills in simulation.
- The key idea is to learn a differentiable, interactive simulation model from a small number of real-world robot interactions.
Plain English Explanation
The paper introduces a new system called IRASim that aims to make it easier to train robots using computer simulation. When training robots, it's often useful to first test their skills in a simulated environment before trying things out in the real world. However, creating accurate simulations that realistically mimic the physical world can be very challenging.
The researchers behind IRASim developed a way to automatically learn a simulation model from just a small number of real-world robot interactions. This learned simulation model is interactive, meaning it can be used to try out different robot actions and see the results, just like a real robot. It's also differentiable, which allows the simulation to be optimized and improved over time as the robot learns.
The key benefit of this approach is that it enables faster and more effective training of robotic manipulation skills in simulation. Instead of having to painstakingly create a detailed simulation model, the robot can learn one on its own through interaction with the real world. This could lead to more capable and versatile robots that are better prepared for real-world tasks.
Technical Explanation
The core of IRASim is a differentiable, interactive simulation model that is learned from a small number of real-world robot interactions. The model takes in the current state of the robot (e.g. joint positions) and a proposed action, and outputs the predicted next state of the robot.
To train this model, the researchers use a physics-informed neural network architecture. This allows the simulation to capture the underlying physical dynamics of the robot and its environment, while still being differentiable end-to-end. The network is trained using supervised learning, where the inputs are the real-world robot states and actions, and the targets are the corresponding next states.
Once trained, the IRASim simulator can be used for rapid exploration and optimization of robotic manipulation skills. The differentiable nature of the model enables the use of gradient-based optimization techniques, allowing the robot to efficiently discover effective sequences of actions.
The researchers demonstrate the effectiveness of their approach through a series of experiments, showing that IRASim can accurately model a real robot's dynamics and enable more efficient training of manipulation tasks compared to traditional approaches.
Critical Analysis
The IRASim approach represents an interesting and potentially valuable contribution to the field of robotic simulation. By learning a differentiable, interactive simulation model from real-world data, the researchers have addressed a key challenge in enabling more effective training of robotic skills in simulation.
However, the paper does acknowledge some limitations of the current approach. For example, the learned simulation model may not generalize well to novel situations or tasks that differ significantly from the training data. Additionally, the paper does not explore the scalability of the approach to more complex robotic systems or broader classes of manipulation tasks.
Further research could investigate ways to address these limitations, such as by incorporating additional physical and environmental information into the simulation model or exploring meta-learning techniques to improve generalization. Investigating the robustness and safety of the IRASim approach in the face of noisy or uncertain real-world data would also be valuable.
Conclusion
The IRASim paper presents a promising approach for creating interactive, real-robot action simulators through learning. By leveraging a differentiable simulation model trained on real-world data, the system enables more efficient and effective training of robotic manipulation skills in simulation. While the approach has some limitations, it represents an important step towards bridging the gap between simulation and the physical world, which could lead to more capable and versatile robots in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
IRASim: Learning Interactive Real-Robot Action Simulators
Fangqi Zhu, Hongtao Wu, Song Guo, Yuxiao Liu, Chilam Cheang, Tao Kong
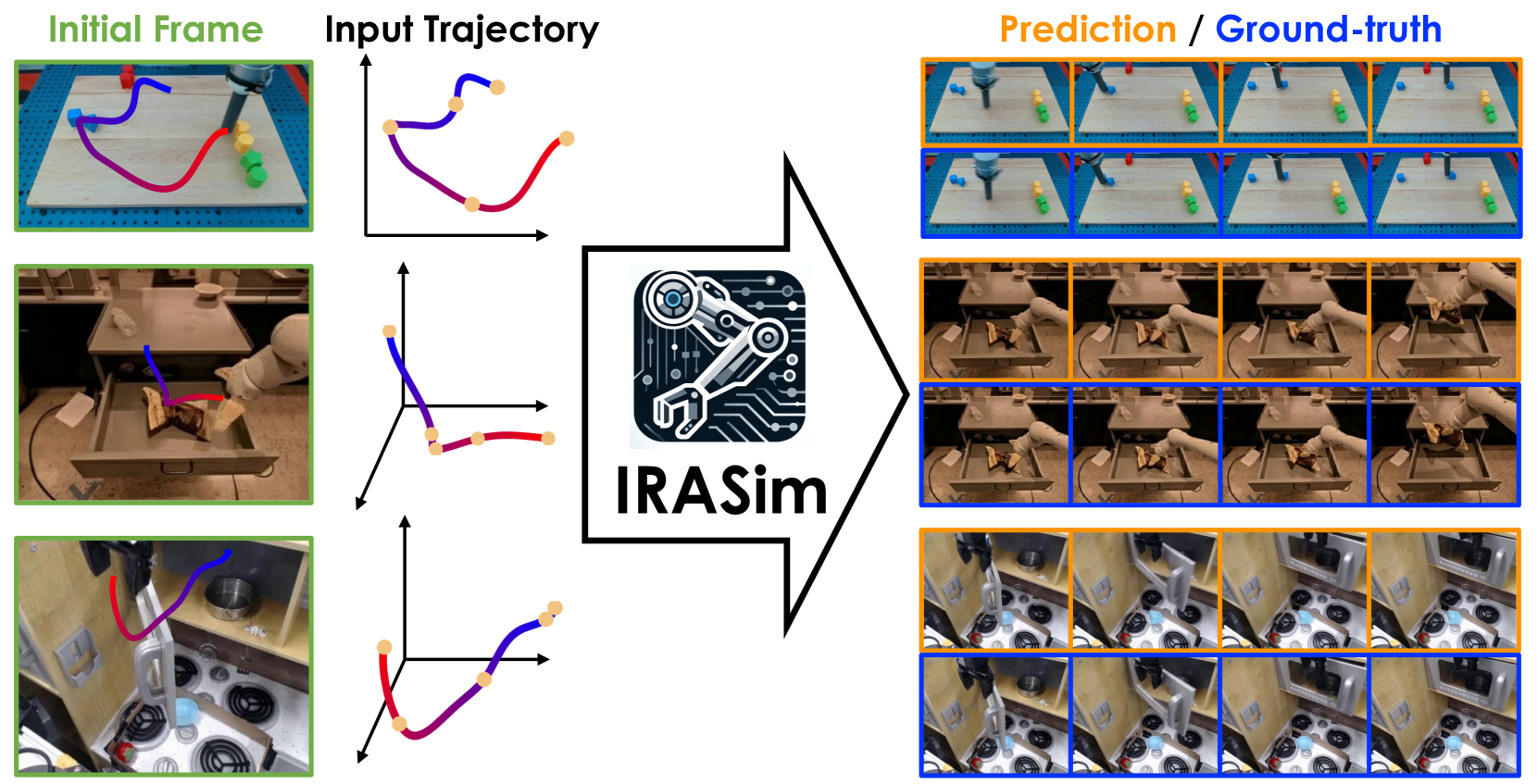
Scalable robot learning in the real world is limited by the cost and safety issues of real robots. In addition, rolling out robot trajectories in the real world can be time-consuming and labor-intensive. In this paper, we propose to learn an interactive real-robot action simulator as an alternative. We introduce a novel method, IRASim, which leverages the power of generative models to generate extremely realistic videos of a robot arm that executes a given action trajectory, starting from an initial given frame. To validate the effectiveness of our method, we create a new benchmark, IRASim Benchmark, based on three real-robot datasets and perform extensive experiments on the benchmark. Results show that IRASim outperforms all the baseline methods and is more preferable in human evaluations. We hope that IRASim can serve as an effective and scalable approach to enhance robot learning in the real world. To promote research for generative real-robot action simulators, we open-source code, benchmark, and checkpoints at https: //gen-irasim.github.io.
Read more6/21/2024
📉
0
Learning Interactive Real-World Simulators
Sherry Yang, Yilun Du, Kamyar Ghasemipour, Jonathan Tompson, Leslie Kaelbling, Dale Schuurmans, Pieter Abbeel
Generative models trained on internet data have revolutionized how text, image, and video content can be created. Perhaps the next milestone for generative models is to simulate realistic experience in response to actions taken by humans, robots, and other interactive agents. Applications of a real-world simulator range from controllable content creation in games and movies, to training embodied agents purely in simulation that can be directly deployed in the real world. We explore the possibility of learning a universal simulator (UniSim) of real-world interaction through generative modeling. We first make the important observation that natural datasets available for learning a real-world simulator are often rich along different dimensions (e.g., abundant objects in image data, densely sampled actions in robotics data, and diverse movements in navigation data). With careful orchestration of diverse datasets, each providing a different aspect of the overall experience, we can simulate the visual outcome of both high-level instructions such as open the drawer and low-level controls from otherwise static scenes and objects. We use the simulator to train both high-level vision-language policies and low-level reinforcement learning policies, each of which can be deployed in the real world in zero shot after training purely in simulation. We also show that other types of intelligence such as video captioning models can benefit from training with simulated experience, opening up even wider applications. Video demos can be found at https://universal-simulator.github.io.
Read more9/27/2024
0
Generalized Robot Learning Framework
Jiahuan Yan, Zhouyang Hong, Yu Zhao, Yu Tian, Yunxin Liu, Travis Davies, Luhui Hu
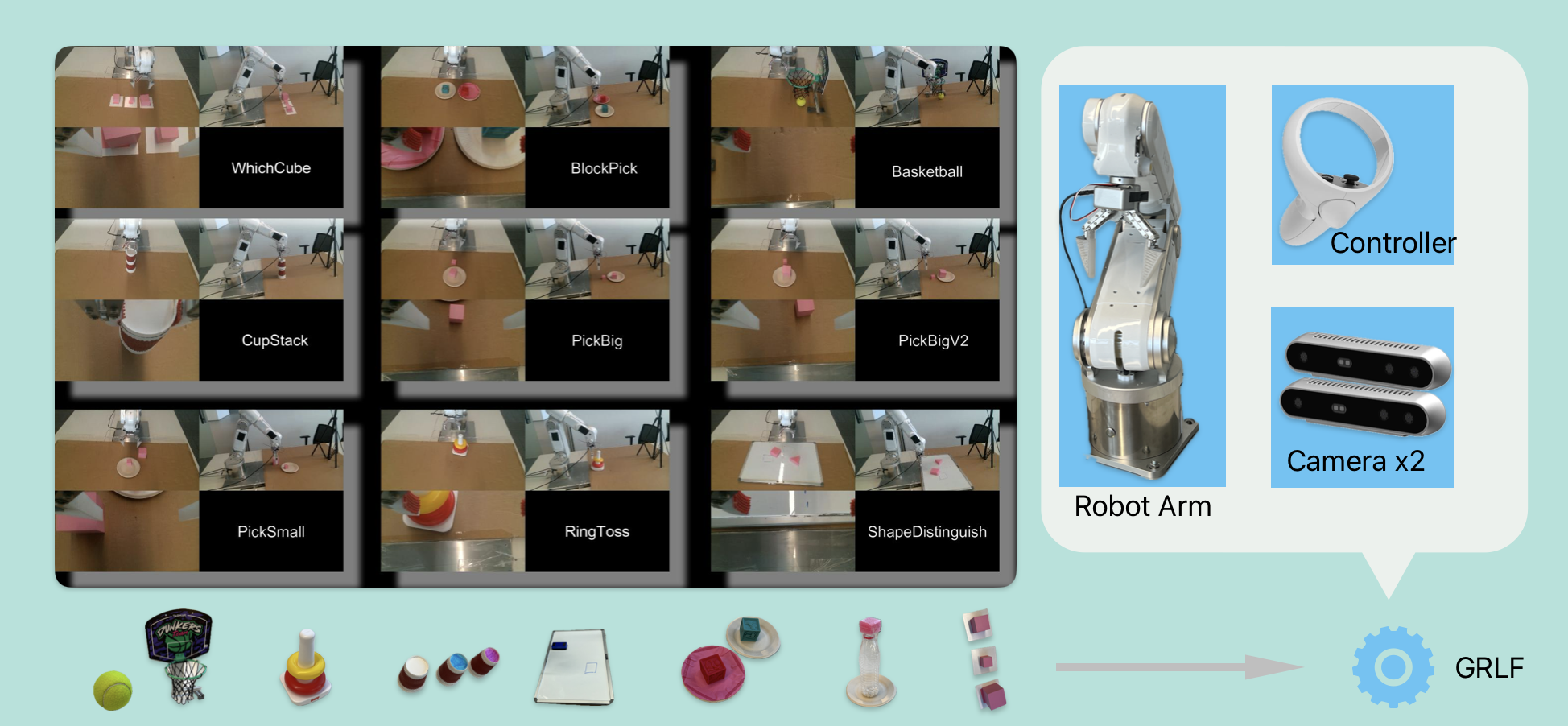
Imitation based robot learning has recently gained significant attention in the robotics field due to its theoretical potential for transferability and generalizability. However, it remains notoriously costly, both in terms of hardware and data collection, and deploying it in real-world environments demands meticulous setup of robots and precise experimental conditions. In this paper, we present a low-cost robot learning framework that is both easily reproducible and transferable to various robots and environments. We demonstrate that deployable imitation learning can be successfully applied even to industrial-grade robots, not just expensive collaborative robotic arms. Furthermore, our results show that multi-task robot learning is achievable with simple network architectures and fewer demonstrations than previously thought necessary. As the current evaluating method is almost subjective when it comes to real-world manipulation tasks, we propose Voting Positive Rate (VPR) - a novel evaluation strategy that provides a more objective assessment of performance. We conduct an extensive comparison of success rates across various self-designed tasks to validate our approach. To foster collaboration and support the robot learning community, we have open-sourced all relevant datasets and model checkpoints, available at huggingface.co/ZhiChengAI.
Read more9/19/2024

0
ASID: Active Exploration for System Identification in Robotic Manipulation
Marius Memmel, Andrew Wagenmaker, Chuning Zhu, Patrick Yin, Dieter Fox, Abhishek Gupta
Model-free control strategies such as reinforcement learning have shown the ability to learn control strategies without requiring an accurate model or simulator of the world. While this is appealing due to the lack of modeling requirements, such methods can be sample inefficient, making them impractical in many real-world domains. On the other hand, model-based control techniques leveraging accurate simulators can circumvent these challenges and use a large amount of cheap simulation data to learn controllers that can effectively transfer to the real world. The challenge with such model-based techniques is the requirement for an extremely accurate simulation, requiring both the specification of appropriate simulation assets and physical parameters. This requires considerable human effort to design for every environment being considered. In this work, we propose a learning system that can leverage a small amount of real-world data to autonomously refine a simulation model and then plan an accurate control strategy that can be deployed in the real world. Our approach critically relies on utilizing an initial (possibly inaccurate) simulator to design effective exploration policies that, when deployed in the real world, collect high-quality data. We demonstrate the efficacy of this paradigm in identifying articulation, mass, and other physical parameters in several challenging robotic manipulation tasks, and illustrate that only a small amount of real-world data can allow for effective sim-to-real transfer. Project website at https://weirdlabuw.github.io/asid
Read more6/28/2024