AutoMate: Specialist and Generalist Assembly Policies over Diverse Geometries

0

Sign in to get full access
Overview
- This paper presents a novel framework called AutoMate for robotic assembly of diverse geometrical objects.
- AutoMate develops specialist and generalist assembly policies that can handle a wide range of object shapes and sizes.
- The system uses a modular approach to combine different sub-policies for robust and versatile assembly.
- Experiments show AutoMate outperforms existing methods on challenging assembly tasks across various object geometries.
Plain English Explanation
The paper explores a new framework called AutoMate that aims to enable robots to assemble a diverse range of objects. Many existing robotic assembly systems are limited in the types of objects they can handle, as they are often specialized for certain shapes and sizes.
AutoMate takes a different approach by developing both specialist and generalist assembly policies. The specialist policies are tailored to specific object geometries, while the generalist policies can handle a wider variety of shapes and sizes. AutoMate combines these different sub-policies in a modular way, allowing the robot to adapt its approach to the task at hand.
Through experiments, the researchers show that AutoMate outperforms previous methods on challenging assembly problems involving objects with diverse geometries. This suggests the framework can make robotic assembly more robust and versatile, potentially expanding the range of products that can be automatically assembled by machines.
Technical Explanation
The paper presents the AutoMate framework, which develops specialist and generalist assembly policies for robotic manipulation tasks over diverse object geometries. AutoMate uses a modular approach to combine different sub-policies, similar to the POCO framework.
The system first learns specialist policies for specific object shapes and sizes, drawing on techniques like imitation learning to capture expert assembly strategies. It then trains a generalist policy using neural network architectures that can handle diverse geometries.
Through experiments on a range of assembly tasks, the authors demonstrate that AutoMate outperforms prior methods in autonomous robotic assembly across different object shapes and sizes. This suggests the modular, multi-policy approach of AutoMate can enhance the versatility and robustness of robotic assembly systems.
Critical Analysis
The paper provides a comprehensive evaluation of AutoMate's performance, testing it on a wide variety of object geometries. However, the authors acknowledge that their experiments were conducted in simulation, and further validation on real-world hardware would be necessary to fully assess the system's capabilities.
Additionally, while AutoMate demonstrates strong generalization abilities, the paper does not deeply explore the model's scaling behavior as the diversity of objects increases. It would be valuable to understand how the system's performance and complexity scales with the breadth of the object distribution.
The authors also note that their current implementation relies on access to ground truth object pose information, which may not always be available in practical settings. Exploring alternative sensing modalities and state estimation techniques could enhance the system's real-world applicability.
Overall, the AutoMate framework represents an exciting advance in robotic assembly, providing a promising approach to handling diverse object geometries. Further research to address the identified limitations could lead to even more robust and versatile assembly systems.
Conclusion
The AutoMate framework presented in this paper offers a novel solution to the challenge of robotic assembly over diverse object geometries. By developing both specialist and generalist policies, and combining them in a modular fashion, the system demonstrates strong performance across a range of assembly tasks.
The results suggest AutoMate could significantly expand the range of products that can be automatically assembled by machines, potentially improving manufacturing efficiency and flexibility. While further validation and refinement are needed, the paper's insights contribute valuable progress towards more versatile and capable robotic assembly systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
AutoMate: Specialist and Generalist Assembly Policies over Diverse Geometries
Bingjie Tang, Iretiayo Akinola, Jie Xu, Bowen Wen, Ankur Handa, Karl Van Wyk, Dieter Fox, Gaurav S. Sukhatme, Fabio Ramos, Yashraj Narang
Robotic assembly for high-mixture settings requires adaptivity to diverse parts and poses, which is an open challenge. Meanwhile, in other areas of robotics, large models and sim-to-real have led to tremendous progress. Inspired by such work, we present AutoMate, a learning framework and system that consists of 4 parts: 1) a dataset of 100 assemblies compatible with simulation and the real world, along with parallelized simulation environments for policy learning, 2) a novel simulation-based approach for learning specialist (i.e., part-specific) policies and generalist (i.e., unified) assembly policies, 3) demonstrations of specialist policies that individually solve 80 assemblies with 80% or higher success rates in simulation, as well as a generalist policy that jointly solves 20 assemblies with an 80%+ success rate, and 4) zero-shot sim-to-real transfer that achieves similar (or better) performance than simulation, including on perception-initialized assembly. The key methodological takeaway is that a union of diverse algorithms from manufacturing engineering, character animation, and time-series analysis provides a generic and robust solution for a diverse range of robotic assembly problems. To our knowledge, AutoMate provides the first simulation-based framework for learning specialist and generalist policies over a wide range of assemblies, as well as the first system demonstrating zero-shot sim-to-real transfer over such a range. For videos and additional details, please see our project website: https://bingjietang718.github.io/automate/
Read more8/2/2024
0
Towards Natural Language-Driven Assembly Using Foundation Models
Omkar Joglekar, Tal Lancewicki, Shir Kozlovsky, Vladimir Tchuiev, Zohar Feldman, Dotan Di Castro
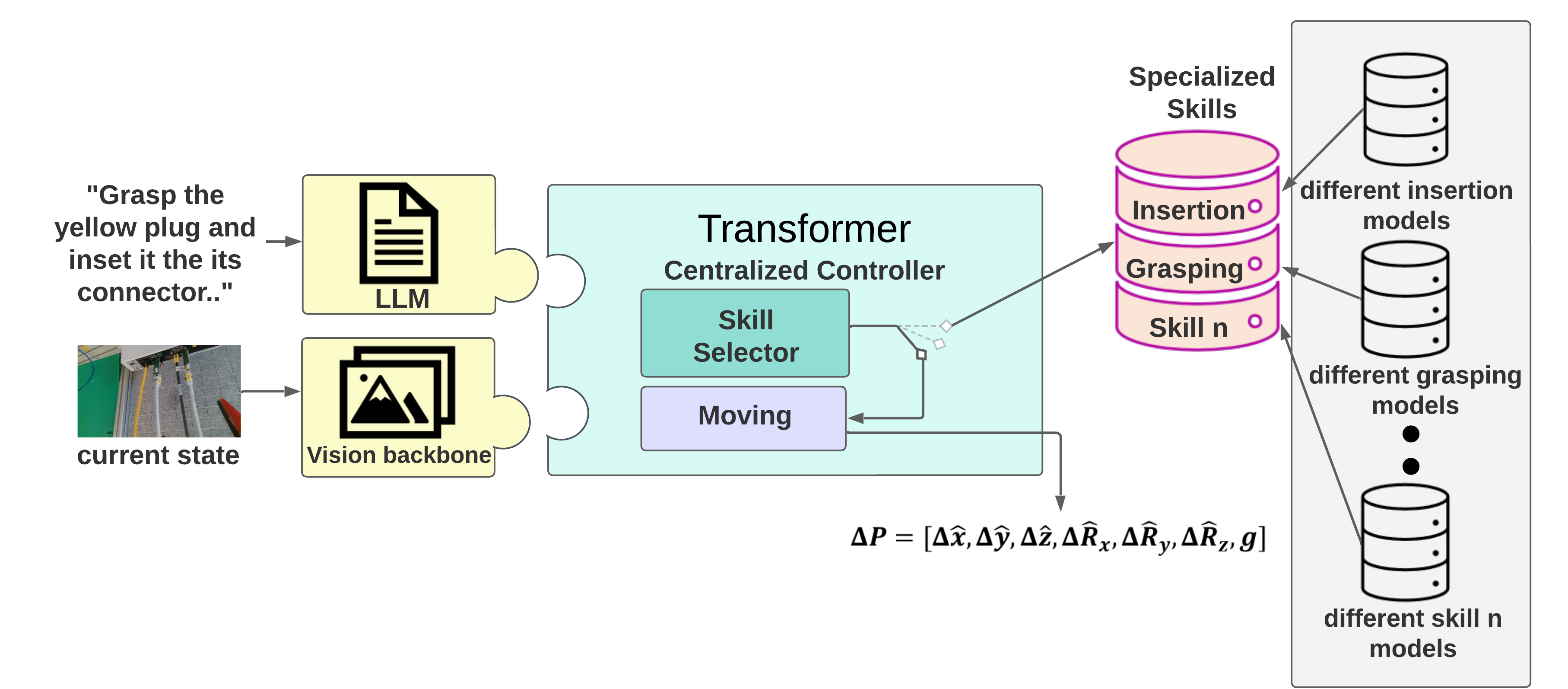
Large Language Models (LLMs) and strong vision models have enabled rapid research and development in the field of Vision-Language-Action models that enable robotic control. The main objective of these methods is to develop a generalist policy that can control robots with various embodiments. However, in industrial robotic applications such as automated assembly and disassembly, some tasks, such as insertion, demand greater accuracy and involve intricate factors like contact engagement, friction handling, and refined motor skills. Implementing these skills using a generalist policy is challenging because these policies might integrate further sensory data, including force or torque measurements, for enhanced precision. In our method, we present a global control policy based on LLMs that can transfer the control policy to a finite set of skills that are specifically trained to perform high-precision tasks through dynamic context switching. The integration of LLMs into this framework underscores their significance in not only interpreting and processing language inputs but also in enriching the control mechanisms for diverse and intricate robotic operations.
Read more6/26/2024

0
Autonomous Robotic Assembly: From Part Singulation to Precise Assembly
Kei Ota, Devesh K. Jha, Siddarth Jain, Bill Yerazunis, Radu Corcodel, Yash Shukla, Antonia Bronars, Diego Romeres
Imagine a robot that can assemble a functional product from the individual parts presented in any configuration to the robot. Designing such a robotic system is a complex problem which presents several open challenges. To bypass these challenges, the current generation of assembly systems is built with a lot of system integration effort to provide the structure and precision necessary for assembly. These systems are mostly responsible for part singulation, part kitting, and part detection, which is accomplished by intelligent system design. In this paper, we present autonomous assembly of a gear box with minimum requirements on structure. The assembly parts are randomly placed in a two-dimensional work environment for the robot. The proposed system makes use of several different manipulation skills such as sliding for grasping, in-hand manipulation, and insertion to assemble the gear box. All these tasks are run in a closed-loop fashion using vision, tactile, and Force-Torque (F/T) sensors. We perform extensive hardware experiments to show the robustness of the proposed methods as well as the overall system. See supplementary video at https://www.youtube.com/watch?v=cZ9M1DQ23OI.
Read more6/12/2024
🎲
0
PoCo: Policy Composition from and for Heterogeneous Robot Learning
Lirui Wang, Jialiang Zhao, Yilun Du, Edward H. Adelson, Russ Tedrake
Training general robotic policies from heterogeneous data for different tasks is a significant challenge. Existing robotic datasets vary in different modalities such as color, depth, tactile, and proprioceptive information, and collected in different domains such as simulation, real robots, and human videos. Current methods usually collect and pool all data from one domain to train a single policy to handle such heterogeneity in tasks and domains, which is prohibitively expensive and difficult. In this work, we present a flexible approach, dubbed Policy Composition, to combine information across such diverse modalities and domains for learning scene-level and task-level generalized manipulation skills, by composing different data distributions represented with diffusion models. Our method can use task-level composition for multi-task manipulation and be composed with analytic cost functions to adapt policy behaviors at inference time. We train our method on simulation, human, and real robot data and evaluate in tool-use tasks. The composed policy achieves robust and dexterous performance under varying scenes and tasks and outperforms baselines from a single data source in both simulation and real-world experiments. See https://liruiw.github.io/policycomp for more details .
Read more5/28/2024