Automated discovery of symbolic laws governing skill acquisition from naturally occurring data
2404.05689
0
0
Abstract
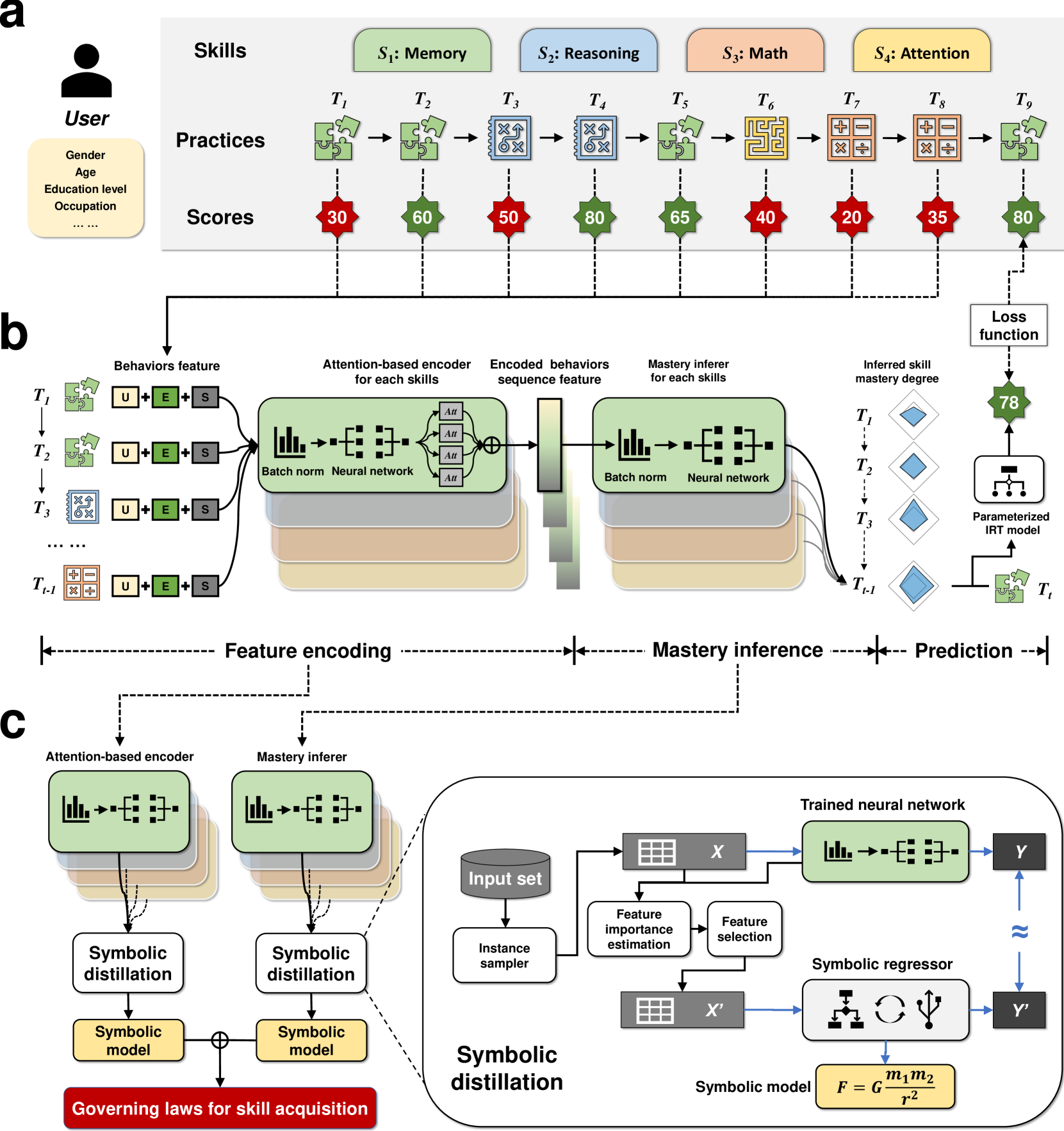
Skill acquisition is a key area of research in cognitive psychology as it encompasses multiple psychological processes. The laws discovered under experimental paradigms are controversial and lack generalizability. This paper aims to unearth the laws of skill learning from large-scale training log data. A two-stage algorithm was developed to tackle the issues of unobservable cognitive states and algorithmic explosion in searching. Initially a deep learning model is employed to determine the learner's cognitive state and assess the feature importance. Subsequently, symbolic regression algorithms are utilized to parse the neural network model into algebraic equations. Experimental results show the algorithm can accurately restore preset laws within a noise range in continuous feedback settings. When applied to Lumosity training data, the method outperforms traditional and recent models in fitness terms. The study reveals two new forms of skill acquisition laws and reaffirms some previous findings.
Create account to get full access
Overview
- This paper proposes a method for automatically discovering symbolic laws that govern skill acquisition from naturally occurring data.
- The authors demonstrate this approach on several datasets, including [linking to relevant papers] skill transfer from simulation to the real world, development of compositional and generalizable skills through interactive language learning, learning collective behaviors from observation, and training social skills in large language models.
- The key idea is to use a symbolic optimization approach to identify mathematical expressions that best capture the underlying patterns in the data.
Plain English Explanation
The researchers in this study wanted to find mathematical rules or "laws" that could explain how people learn new skills over time. Instead of relying on human-designed models, they used a computer algorithm to automatically discover these laws by looking at real-world data on skill acquisition.
[Linking to relevant papers] For example, they looked at data on how people learn to control simulated robots, develop language skills through interactive games, coordinate group behaviors, and pick up social skills. The algorithm tried to find mathematical formulas that could accurately describe the patterns in these various skill learning datasets.
The main advantage of this approach is that it can uncover hidden relationships in the data that aren't obvious to human researchers. By discovering these symbolic laws automatically, the researchers hope to gain deeper insights into the fundamental principles that govern how we acquire new skills and abilities.
Technical Explanation
The core of this paper is a symbolic optimization framework that can automatically discover mathematical expressions that best fit observed skill acquisition data. The authors formulate this as an optimization problem, where the goal is to find an expression involving a set of predictor variables (e.g. practice time, feedback, task difficulty) that minimizes the error between the predicted and observed skill levels over time.
To solve this problem, the authors use a symbolic regression technique that iteratively generates and evaluates candidate expressions, gradually refining them to converge on an optimal solution. This allows the algorithm to explore a wide space of potential mathematical models without relying on human-designed equations.
The authors demonstrate this approach on several datasets related to skill learning, including [linking to relevant papers] transferring skills from simulation to the real world, developing compositional and generalizable skills through interactive language learning, learning collective behaviors from observation, and training social skills in large language models. In each case, the discovered symbolic laws provide insights into the underlying dynamics of skill acquisition.
Critical Analysis
One key strength of this work is the generality of the symbolic optimization approach, which allows it to be applied to a diverse range of skill learning domains. The authors show how this method can uncover meaningful patterns in several different datasets, suggesting it has broad applicability.
However, a potential limitation is that the discovered expressions, while mathematically optimal, may not always align with intuitive human understanding of the skill acquisition process. The symbolic laws could represent complex nonlinear relationships that are difficult to interpret.
Additionally, the paper does not extensively explore the robustness of the discovered laws to variations in the data or the training process. Further research would be needed to understand how sensitive the results are to factors like data quality, noise, or hyperparameter choices in the optimization algorithm.
Overall, this work represents a promising step towards automated discovery of the underlying principles governing skill learning. By shifting the focus from human-designed models to data-driven symbolic optimization, the authors open up new avenues for gaining fundamental insights into this important cognitive process.
Conclusion
This paper presents a novel approach for automatically discovering symbolic laws that describe the dynamics of skill acquisition from real-world data. By formulating this as an optimization problem and using symbolic regression techniques, the authors are able to uncover mathematical expressions that capture the essential patterns in diverse skill learning datasets.
The discovered laws provide valuable insights into the fundamental principles underlying how we develop new abilities over time, with potential applications in areas like [linking to relevant papers] simulation-to-real-world skill transfer, compositional skill learning, collective behavior modeling, and social skill training in language models. While further research is needed to fully understand the limitations and robustness of this approach, this work represents an important step towards a more data-driven, automated understanding of skill acquisition.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
0
0
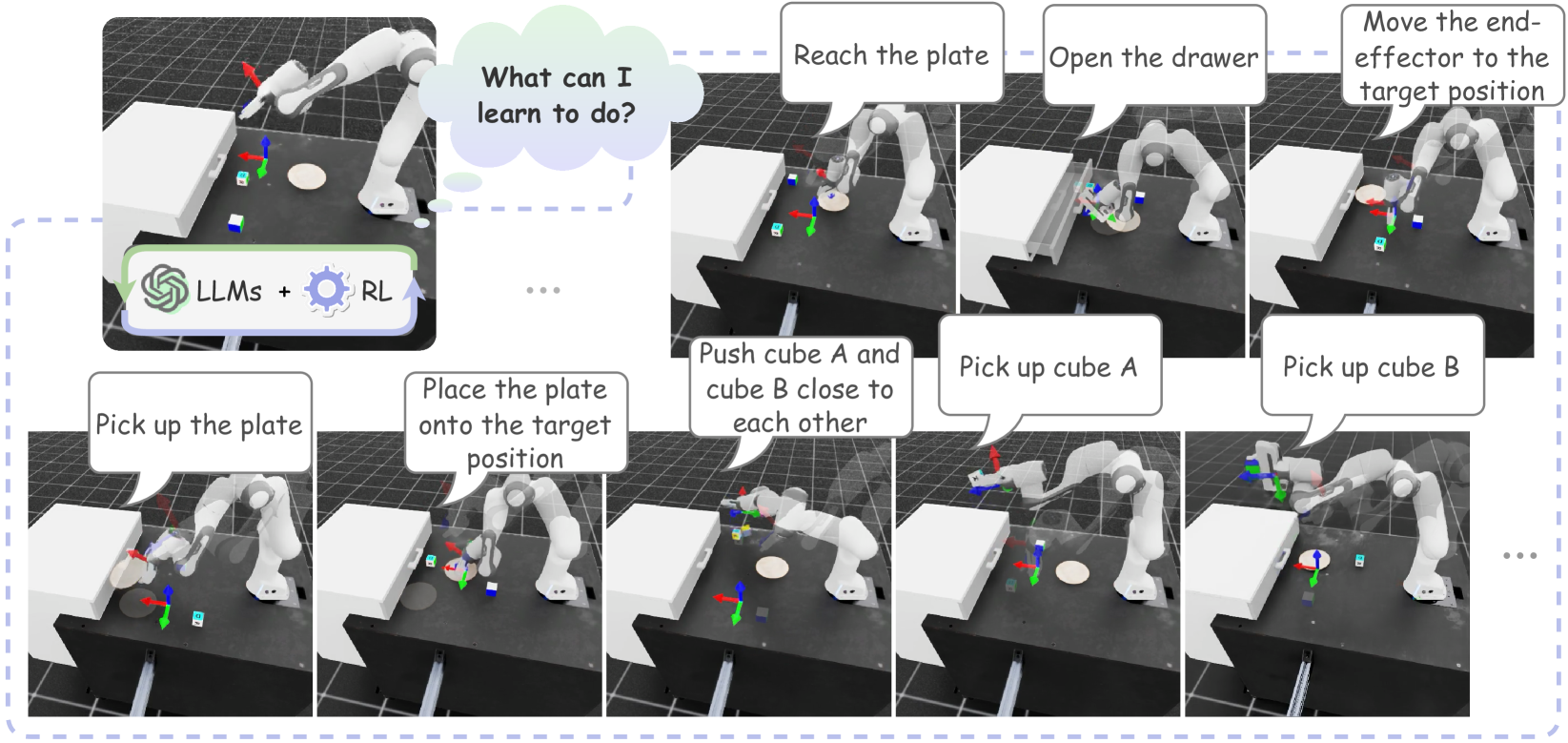
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a grasping capability can never emerge from a skill library containing only diverse pushing skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the ASD skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. The project page can be found at: https://agentic-skill-discovery.github.io.
5/27/2024
A Mathematical Theory for Learning Semantic Languages by Abstract Learners
Kuo-Yu Liao, Cheng-Shang Chang, Y. -W. Peter Hong
0
0
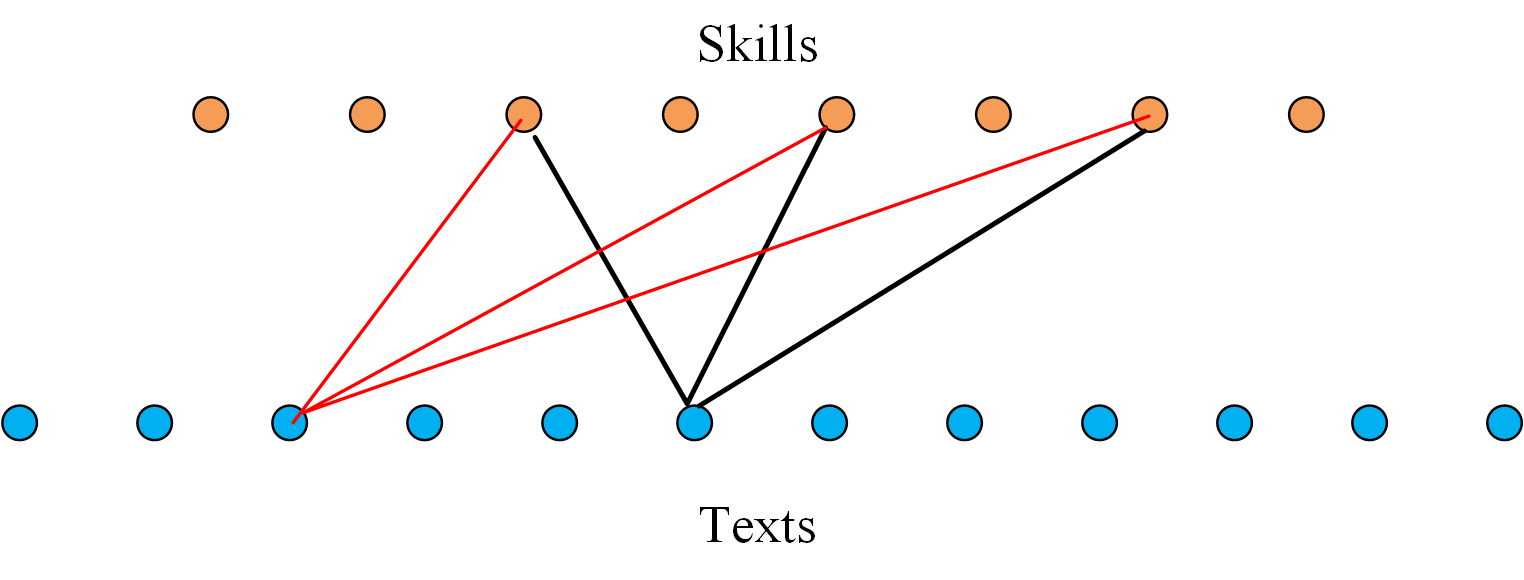
Recent advances in Large Language Models (LLMs) have demonstrated the emergence of capabilities (learned skills) when the number of system parameters and the size of training data surpass certain thresholds. The exact mechanisms behind such phenomena are not fully understood and remain a topic of active research. Inspired by the skill-text bipartite graph model proposed by Arora and Goyal for modeling semantic languages, we develop a mathematical theory to explain the emergence of learned skills, taking the learning (or training) process into account. Our approach models the learning process for skills in the skill-text bipartite graph as an iterative decoding process in Low-Density Parity Check (LDPC) codes and Irregular Repetition Slotted ALOHA (IRSA). Using density evolution analysis, we demonstrate the emergence of learned skills when the ratio of the number of training texts to the number of skills exceeds a certain threshold. Our analysis also yields a scaling law for testing errors relative to this ratio. Upon completion of the training, the association of learned skills can also be acquired to form a skill association graph. We use site percolation analysis to derive the conditions for the existence of a giant component in the skill association graph. Our analysis can also be extended to the setting with a hierarchy of skills, where a fine-tuned model is built upon a foundation model. It is also applicable to the setting with multiple classes of skills and texts. As an important application, we propose a method for semantic compression and discuss its connections to semantic communication.
5/17/2024
Language-guided Skill Learning with Temporal Variational Inference
Haotian Fu, Pratyusha Sharma, Elias Stengel-Eskin, George Konidaris, Nicolas Le Roux, Marc-Alexandre C^ot'e, Xingdi Yuan
0
0
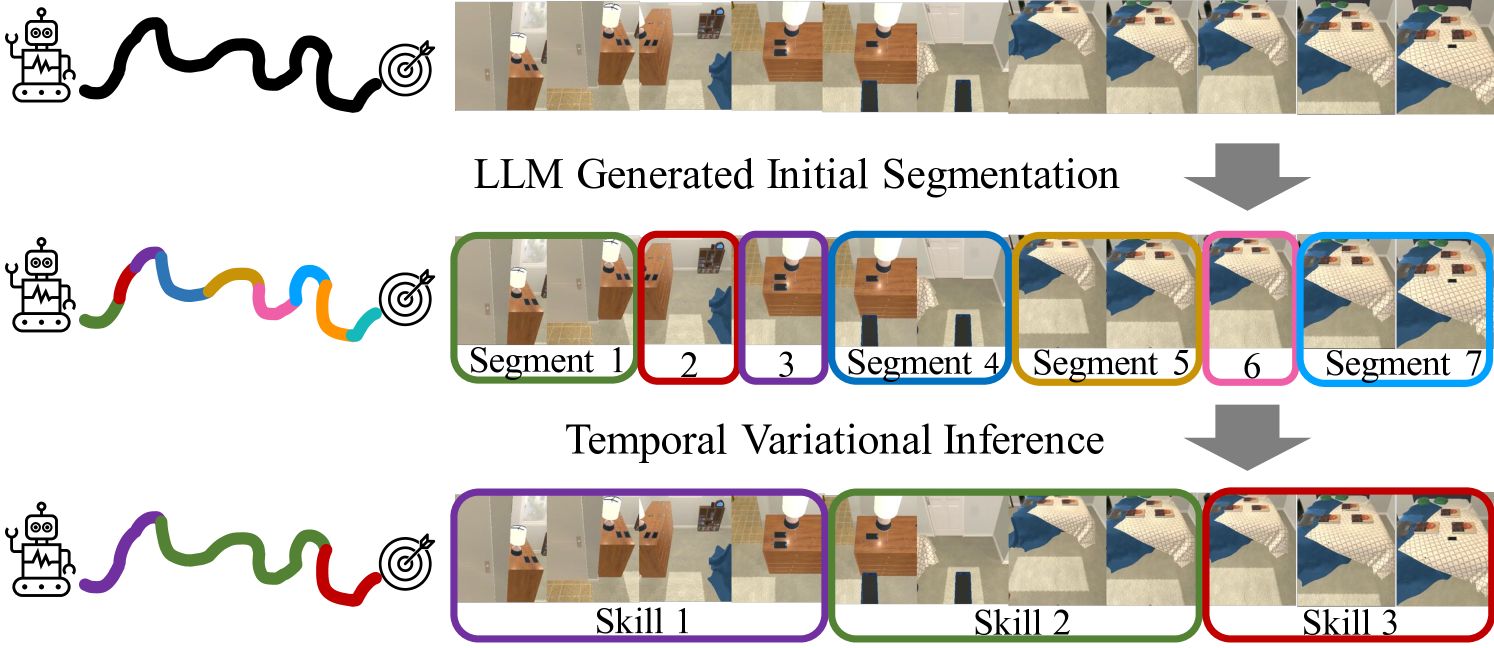
We present an algorithm for skill discovery from expert demonstrations. The algorithm first utilizes Large Language Models (LLMs) to propose an initial segmentation of the trajectories. Following that, a hierarchical variational inference framework incorporates the LLM-generated segmentation information to discover reusable skills by merging trajectory segments. To further control the trade-off between compression and reusability, we introduce a novel auxiliary objective based on the Minimum Description Length principle that helps guide this skill discovery process. Our results demonstrate that agents equipped with our method are able to discover skills that help accelerate learning and outperform baseline skill learning approaches on new long-horizon tasks in BabyAI, a grid world navigation environment, as well as ALFRED, a household simulation environment.
5/28/2024
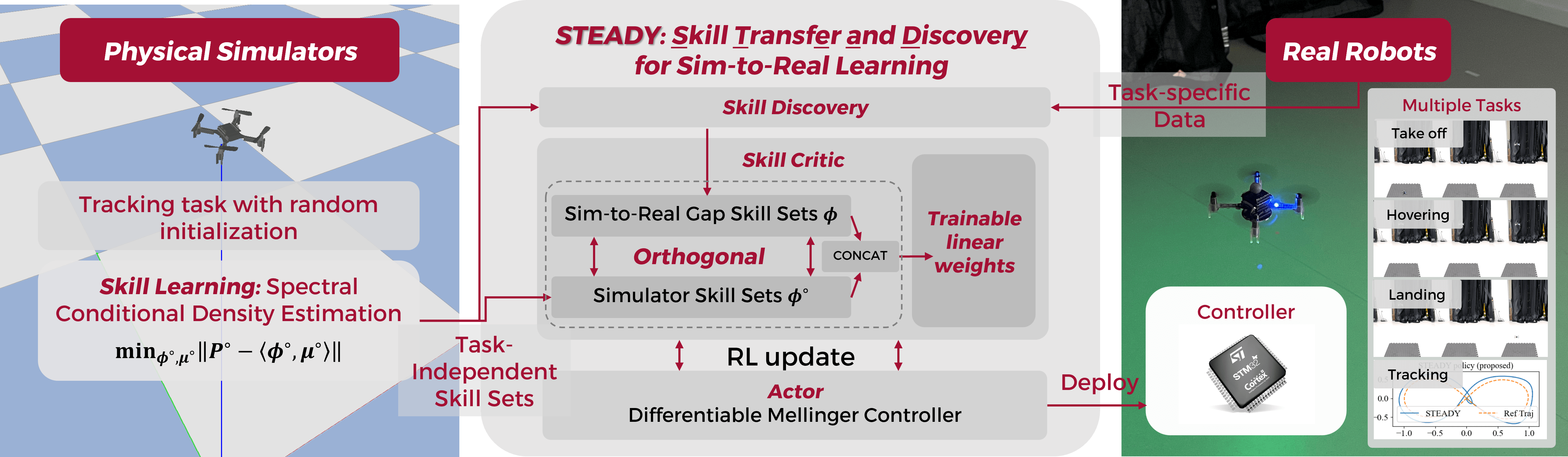
Skill Transfer and Discovery for Sim-to-Real Learning: A Representation-Based Viewpoint
Haitong Ma, Zhaolin Ren, Bo Dai, Na Li
0
0
We study sim-to-real skill transfer and discovery in the context of robotics control using representation learning. We draw inspiration from spectral decomposition of Markov decision processes. The spectral decomposition brings about representation that can linearly represent the state-action value function induced by any policies, thus can be regarded as skills. The skill representations are transferable across arbitrary tasks with the same transition dynamics. Moreover, to handle the sim-to-real gap in the dynamics, we propose a skill discovery algorithm that learns new skills caused by the sim-to-real gap from real-world data. We promote the discovery of new skills by enforcing orthogonal constraints between the skills to learn and the skills from simulators, and then synthesize the policy using the enlarged skill sets. We demonstrate our methodology by transferring quadrotor controllers from simulators to Crazyflie 2.1 quadrotors. We show that we can learn the skill representations from a single simulator task and transfer these to multiple different real-world tasks including hovering, taking off, landing and trajectory tracking. Our skill discovery approach helps narrow the sim-to-real gap and improve the real-world controller performance by up to 30.2%.
4/9/2024