Sensor-based Multi-Robot Coverage Control with Spatial Separation in Unstructured Environments
2403.01710
0
0

Abstract
Multi-robot systems have increasingly become instrumental in tackling search and coverage problems. However, the challenge of optimizing task efficiency without compromising task success still persists, particularly in expansive, unstructured environments with dense obstacles. This paper presents an innovative, decentralized Voronoi-based approach for search and coverage to reactively navigate these complexities while maintaining safety. This approach leverages the active sensing capabilities of multi-robot systems to supplement GIS (Geographic Information System), offering a more comprehensive and real-time understanding of the environment. Based on point cloud data, which is inherently non-convex and unstructured, this method efficiently generates collision-free Voronoi regions using only local sensing information through spatial decomposition and spherical mirroring techniques. Then, deadlock-aware guided map integrated with a gradient-optimized, centroid Voronoi-based coverage control policy, is constructed to improve efficiency by avoiding exhaustive searches and local sensing pitfalls. The effectiveness of our algorithm has been validated through extensive numerical simulations in high-fidelity environments, demonstrating significant improvements in both task success rate, coverage ratio, and task execution time compared with others.
Create account to get full access
Overview
- This paper presents a sensor-based multi-robot search and coverage algorithm for unstructured environments.
- The algorithm aims to efficiently explore and cover an area while maintaining spatial separation between the robots.
- The research explores techniques to enable multi-robot coordination and coverage in complex, unknown environments.
Plain English Explanation
The paper describes a system that allows multiple robots to work together to search and explore an unknown area efficiently. The key idea is to have the robots spread out and cover as much ground as possible, without getting too close to each other.
This is important because in many real-world scenarios, such as search and rescue operations or environmental monitoring, you want a team of robots to be able to thoroughly investigate an area without the robots interfering with each other's movements or sensors. By maintaining spatial separation, the robots can work together more effectively.
The system uses sensors on the robots to map the environment and track the locations of the other robots. This allows the robots to plan their movements and coverage strategies in a coordinated way, avoiding collisions and ensuring they cover the entire search area.
The researchers tested their algorithm in simulation and found that it was able to achieve efficient coverage and exploration of the environment while keeping the robots at a safe distance from each other. This suggests the approach could be useful for real-world applications where you need a team of robots to work together in complex, unknown surroundings.
Technical Explanation
The paper presents a sensor-based multi-robot search and coverage algorithm for unstructured environments. The key novelty is the incorporation of spatial separation constraints to ensure the robots maintain a safe distance from each other during exploration and coverage.
The algorithm uses a decentralized approach, where each robot makes local decisions based on its sensor data and information exchanged with its neighbors. The robots use aerial LIDAR maps to build a representation of the environment and track the locations of the other robots.
The coverage strategy involves model predictive trajectory generation to plan the robots' movements, while ensuring collision-free trajectories in cluttered environments. The spatial separation constraints are incorporated into the trajectory optimization process to maintain the desired distance between robots.
The researchers evaluated the algorithm in simulation, demonstrating its ability to efficiently explore and cover the environment while maintaining the specified spatial separation. The results suggest the approach could be useful for real-time distributed target searching in complex, unstructured scenarios.
Critical Analysis
The paper presents a well-designed algorithm and thorough evaluation, but there are a few potential limitations and areas for further research:
-
The simulations were conducted in relatively simple, 2D environments. Extending the approach to more complex, 3D environments with obstacles and uneven terrain would be an important next step.
-
The paper does not address how the algorithm would handle dynamic changes in the environment, such as moving obstacles or targets. Incorporating adaptability to environmental changes could enhance the practical applicability of the approach.
-
The spatial separation constraints were fixed in the current implementation. Allowing the robots to dynamically adjust the separation distance based on the task or environmental conditions could further improve the algorithm's efficiency and flexibility.
-
While the simulation results are promising, real-world validation with physical robots would be necessary to fully assess the algorithm's performance and identify any practical challenges.
Overall, the research presented in this paper contributes valuable insights into the challenges of coordinating multi-robot systems in unstructured environments. The proposed approach could have important applications in areas such as search and rescue, environmental monitoring, and infrastructure inspection.
Conclusion
This paper introduces a sensor-based multi-robot search and coverage algorithm that incorporates spatial separation constraints to enable efficient exploration and coverage in unstructured environments. The decentralized approach allows the robots to make local decisions based on their sensor data and communication with neighbors, while maintaining a safe distance from each other.
The simulation results demonstrate the algorithm's ability to effectively explore and cover the environment while satisfying the spatial separation requirements. This suggests the approach could be a valuable tool for real-world applications that require a team of robots to work together in complex, unknown settings.
Further research to address the identified limitations and validate the approach in physical deployments would be a promising next step in advancing the practical application of this multi-robot coordination and coverage system.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

An Active Search Strategy with Multiple Unmanned Aerial Systems for Multiple Targets
Chuanxiang Gao, Xinyi Wang, Xi Chen, Ben M. Chen
0
0
The challenge of efficient target searching in vast natural environments has driven the need for advanced multi-UAV active search strategies. This paper introduces a novel method in which global and local information is adeptly merged to avoid issues such as myopia and redundant back-and-forth movements. In addition, a trajectory generation method is used to ensure the search pattern within continuous space. To further optimize multi-agent cooperation, the Voronoi partition technique is employed, ensuring a reduction in repetitive flight patterns and making the control of multiple agents in a decentralized way. Through a series of experiments, the evaluation and comparison results demonstrate the efficiency of our approach in various environments. The primary application of this innovative approach is demonstrated in the search for horseshoe crabs within their wild habitats, showcasing its potential to revolutionize ecological survey and conservation efforts.
6/26/2024

Mobile Robot Sensory Coverage in 2-D Environments: An Optimization Approach with Efficiency Bounds
E. Fourney, J. W. Burdick, E. D. Rimon
0
0
This paper considers three related mobile robot multi-target sensory coverage and inspection planning problems in 2-D environments. In the first problem, a mobile robot must find the shortest path to observe multiple targets with a limited range sensor in an obstacle free environment. In the second problem, the mobile robot must efficiently observe multiple targets while taking advantage of multi-target views in an obstacle free environment. The third problem considers multi-target sensory coverage in the presence of obstacles that obstruct sensor views of the targets. We show how all three problems can be formulated in a MINLP optimization framework. Because exact solutions to these problems are NP-hard, we introduce polynomial time approximation algorithms for each problem. These algorithms combine polynomial-time methods to approximate the optimal target sensing order, combined with efficient convex optimization methods that incorporate the constraints posed by the robot sensor footprint and obstacles in the environment. Importantly, we develop bounds that limit the gap between the exact and approximate solutions. Algorithms for all problems are fully implemented and illustrated with examples. Beyond the utility of our algorithms, the bounds derived in the paper contribute to the theory of optimal coverage planning algorithms.
5/27/2024

Decentralized Multi-Robot Line-of-Sight Connectivity Maintenance under Uncertainty
Yupeng Yang, Yiwei Lyu, Yanze Zhang, Sha Yi, Wenhao Luo
0
0
In this paper, we propose a novel decentralized control method to maintain Line-of-Sight connectivity for multi-robot networks in the presence of Guassian-distributed localization uncertainty. In contrast to most existing work that assumes perfect positional information about robots or enforces overly restrictive rigid formation against uncertainty, our method enables robots to preserve Line-of-Sight connectivity with high probability under unbounded Gaussian-like positional noises while remaining minimally intrusive to the original robots' tasks. This is achieved by a motion coordination framework that jointly optimizes the set of existing Line-of-Sight edges to preserve and control revisions to the nominal task-related controllers, subject to the safety constraints and the corresponding composition of uncertainty-aware Line-of-Sight control constraints. Such compositional control constraints, expressed by our novel notion of probabilistic Line-of-Sight connectivity barrier certificates (PrLOS-CBC) for pairwise robots using control barrier functions, explicitly characterize the deterministic admissible control space for the two robots. The resulting motion ensures Line-of-Sight connectedness for the robot team with high probability. Furthermore, we propose a fully decentralized algorithm that decomposes the motion coordination framework by interleaving the composite constraint specification and solving for the resulting optimization-based controllers. The optimality of our approach is justified by the theoretical proofs. Simulation and real-world experiments results are given to demonstrate the effectiveness of our method.
6/19/2024
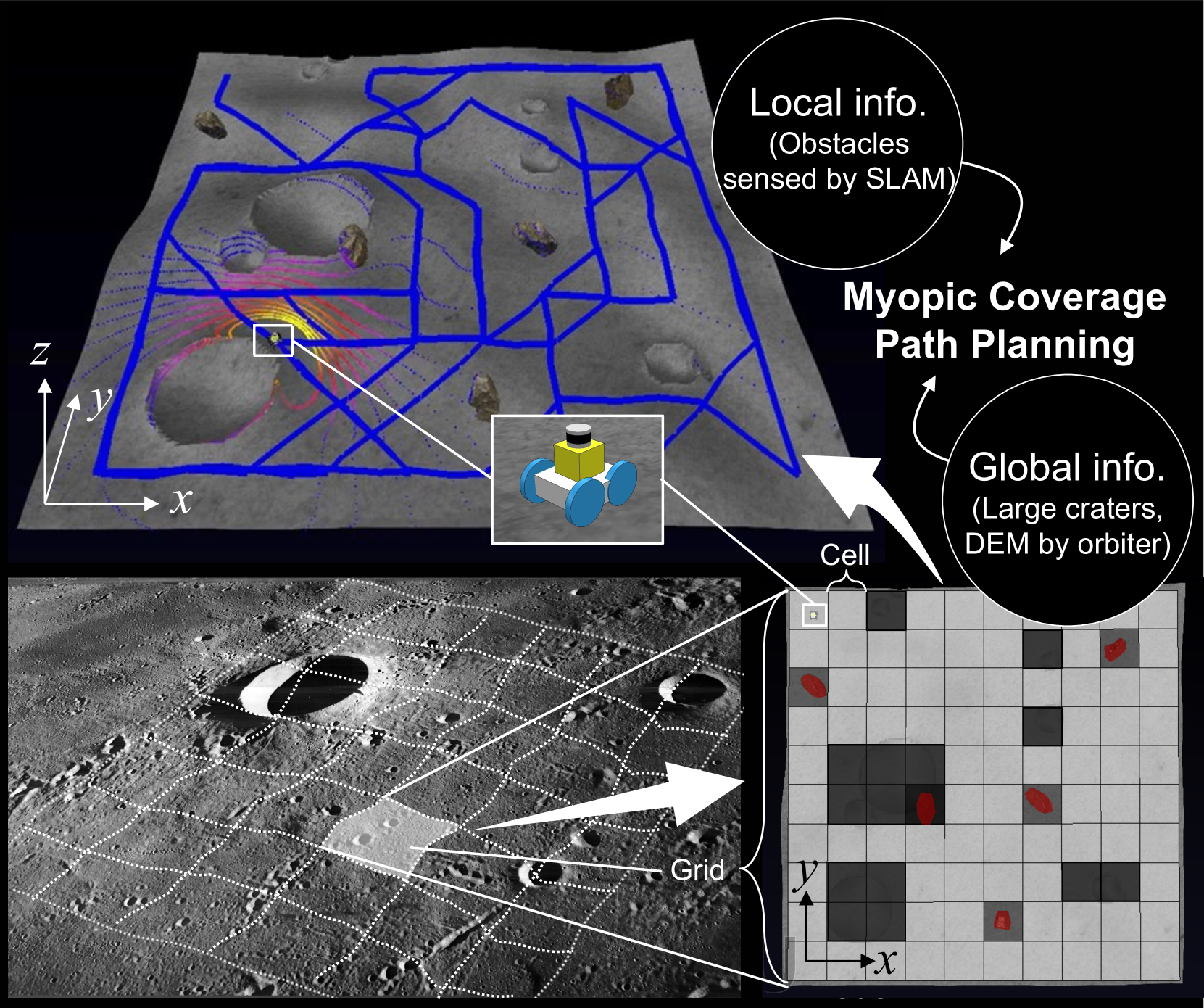
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Shreya Santra, Kentaro Uno, Gen Kudo, Kazuya Yoshida
0
0
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
4/30/2024