Autonomous Behavior Planning For Humanoid Loco-manipulation Through Grounded Language Model

0

Sign in to get full access
Overview
- This paper presents a method for enabling autonomous behavior planning in humanoid robots through the use of a grounded language model.
- The proposed approach allows robots to understand and execute natural language instructions for performing complex loco-manipulation tasks.
- The researchers developed a framework that combines language understanding, task planning, and motion control to enable robots to carry out multi-step behaviors.
Plain English Explanation
The paper describes a way to help robots understand and follow natural language instructions, allowing them to perform complex physical tasks involving both movement (locomotion) and manipulation of objects. The researchers created a system that combines several key capabilities:
-
Language Understanding: The system can interpret human language commands and extract the relevant information needed to plan and execute the requested task.
-
Task Planning: Based on the language input, the system can break down the overall task into a sequence of specific actions the robot needs to take to accomplish the goal.
-
Motion Control: The system can then control the robot's movements and object manipulation to carry out each step of the planned task.
This allows the robot to accept instructions phrased in everyday language, like "Pick up the red ball and place it on the shelf," and then autonomously figure out how to do that, rather than requiring detailed, step-by-step programming. The researchers tested their approach on a humanoid robot platform and found it could successfully execute a variety of loco-manipulation tasks based on natural language commands.
Technical Explanation
The paper presents a framework for Autonomous Behavior Planning For Humanoid Loco-manipulation Through Grounded Language Model. The key components of the system include:
-
Language Grounding: The researchers developed a language model that can map natural language instructions to a semantic representation of the task. This allows the robot to understand the meaning and intent behind the commands.
-
Task Planning: Based on the semantic task representation, the system plans a sequence of actions the robot needs to take to accomplish the goal, including both locomotion and manipulation steps.
-
Motion Control: The planned task is then translated into low-level control commands that govern the robot's movements and object interactions to carry out each step.
The system was evaluated on a humanoid robot platform performing various loco-manipulation tasks, such as picking up objects and placing them in different locations. The results demonstrated the robot's ability to execute complex behaviors directly from natural language instructions.
Critical Analysis
The paper presents a promising approach for enabling more natural and intuitive control of robots through language-based interfaces. However, the authors acknowledge several limitations and areas for potential improvement:
-
Scalability: The current language model was trained on a relatively small dataset, which could limit its ability to handle a wide range of natural language expressions. Expanding the training data and improving the language understanding capabilities could enhance the system's robustness.
-
Task Generalization: While the system could execute the tested loco-manipulation tasks, the authors note the need to further explore its ability to generalize to novel, unseen tasks based on language input.
-
Safety and Robustness: Ensuring the safe and reliable execution of language-directed behaviors in real-world environments will be an important consideration for future development.
-
Human-Robot Interaction: The paper focuses primarily on the technical aspects of the system, but the user experience and natural interaction between humans and robots is also a crucial area for further research.
Overall, the proposed approach represents an important step towards more intuitive and accessible robot control, but continued research and development will be necessary to realize the full potential of language-based autonomous behavior planning.
Conclusion
This paper presents a novel framework for enabling humanoid robots to understand and execute complex loco-manipulation tasks through the use of a grounded language model. By combining language understanding, task planning, and motion control, the system allows robots to accept and carry out natural language instructions, potentially making robotic systems more accessible and user-friendly.
The researchers demonstrated the viability of their approach through experiments on a humanoid robot platform, showing the system's ability to interpret language commands and autonomously perform various object manipulation and locomotion tasks. While the current system has some limitations, the work represents an important step towards more natural and intuitive human-robot interaction, with potential applications in areas such as assistive robotics, household automation, and collaborative industrial settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Autonomous Behavior Planning For Humanoid Loco-manipulation Through Grounded Language Model
Jin Wang, Arturo Laurenzi, Nikos Tsagarakis
Enabling humanoid robots to perform autonomously loco-manipulation in unstructured environments is crucial and highly challenging for achieving embodied intelligence. This involves robots being able to plan their actions and behaviors in long-horizon tasks while using multi-modality to perceive deviations between task execution and high-level planning. Recently, large language models (LLMs) have demonstrated powerful planning and reasoning capabilities for comprehension and processing of semantic information through robot control tasks, as well as the usability of analytical judgment and decision-making for multi-modal inputs. To leverage the power of LLMs towards humanoid loco-manipulation, we propose a novel language-model based framework that enables robots to autonomously plan behaviors and low-level execution under given textual instructions, while observing and correcting failures that may occur during task execution. To systematically evaluate this framework in grounding LLMs, we created the robot 'action' and 'sensing' behavior library for task planning, and conducted mobile manipulation tasks and experiments in both simulated and real environments using the CENTAURO robot, and verified the effectiveness and application of this approach in robotic tasks with autonomous behavioral planning.
Read more8/16/2024

0
Grounding Language Models in Autonomous Loco-manipulation Tasks
Jin Wang, Nikos Tsagarakis
Humanoid robots with behavioral autonomy have consistently been regarded as ideal collaborators in our daily lives and promising representations of embodied intelligence. Compared to fixed-based robotic arms, humanoid robots offer a larger operational space while significantly increasing the difficulty of control and planning. Despite the rapid progress towards general-purpose humanoid robots, most studies remain focused on locomotion ability with few investigations into whole-body coordination and tasks planning, thus limiting the potential to demonstrate long-horizon tasks involving both mobility and manipulation under open-ended verbal instructions. In this work, we propose a novel framework that learns, selects, and plans behaviors based on tasks in different scenarios. We combine reinforcement learning (RL) with whole-body optimization to generate robot motions and store them into a motion library. We further leverage the planning and reasoning features of the large language model (LLM), constructing a hierarchical task graph that comprises a series of motion primitives to bridge lower-level execution with higher-level planning. Experiments in simulation and real-world using the CENTAURO robot show that the language model based planner can efficiently adapt to new loco-manipulation tasks, demonstrating high autonomy from free-text commands in unstructured scenes.
Read more9/4/2024
0
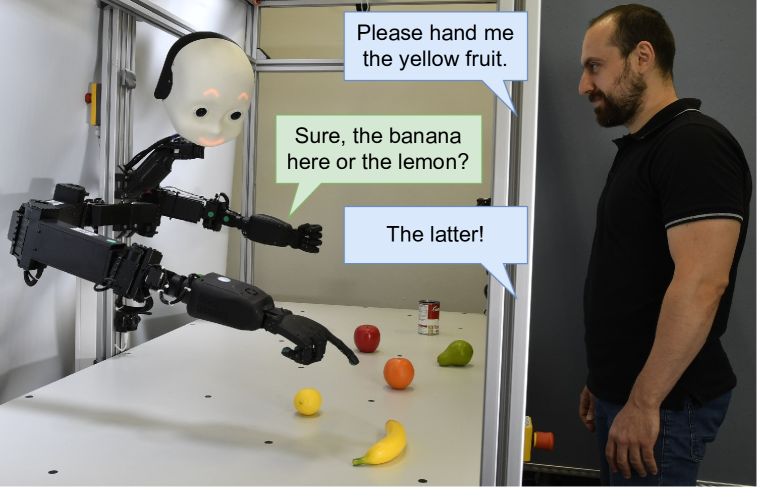
When Robots Get Chatty: Grounding Multimodal Human-Robot Conversation and Collaboration
Philipp Allgeuer, Hassan Ali, Stefan Wermter
We investigate the use of Large Language Models (LLMs) to equip neural robotic agents with human-like social and cognitive competencies, for the purpose of open-ended human-robot conversation and collaboration. We introduce a modular and extensible methodology for grounding an LLM with the sensory perceptions and capabilities of a physical robot, and integrate multiple deep learning models throughout the architecture in a form of system integration. The integrated models encompass various functions such as speech recognition, speech generation, open-vocabulary object detection, human pose estimation, and gesture detection, with the LLM serving as the central text-based coordinating unit. The qualitative and quantitative results demonstrate the huge potential of LLMs in providing emergent cognition and interactive language-oriented control of robots in a natural and social manner.
Read more7/2/2024

0
HYPERmotion: Learning Hybrid Behavior Planning for Autonomous Loco-manipulation
Jin Wang, Rui Dai, Weijie Wang, Luca Rossini, Francesco Ruscelli, Nikos Tsagarakis
Enabling robots to autonomously perform hybrid motions in diverse environments can be beneficial for long-horizon tasks such as material handling, household chores, and work assistance. This requires extensive exploitation of intrinsic motion capabilities, extraction of affordances from rich environmental information, and planning of physical interaction behaviors. Despite recent progress has demonstrated impressive humanoid whole-body control abilities, they struggle to achieve versatility and adaptability for new tasks. In this work, we propose HYPERmotion, a framework that learns, selects and plans behaviors based on tasks in different scenarios. We combine reinforcement learning with whole-body optimization to generate motion for 38 actuated joints and create a motion library to store the learned skills. We apply the planning and reasoning features of the large language models (LLMs) to complex loco-manipulation tasks, constructing a hierarchical task graph that comprises a series of primitive behaviors to bridge lower-level execution with higher-level planning. By leveraging the interaction of distilled spatial geometry and 2D observation with a visual language model (VLM) to ground knowledge into a robotic morphology selector to choose appropriate actions in single- or dual-arm, legged or wheeled locomotion. Experiments in simulation and real-world show that learned motions can efficiently adapt to new tasks, demonstrating high autonomy from free-text commands in unstructured scenes. Videos and website: hy-motion.github.io/
Read more6/24/2024