Grounding Language Models in Autonomous Loco-manipulation Tasks

0

Sign in to get full access
Overview
- This paper explores how language models can be grounded in autonomous loco-manipulation tasks for humanoid robots.
- The authors propose a methodology for combining language models with robotic control to enable complex behaviors.
- The research aims to advance the state-of-the-art in language-enabled robotics and multi-modal AI systems.
Plain English Explanation
The paper discusses how language models, which are AI systems trained on vast amounts of text data, can be integrated with robotic control systems to enable humanoid robots to perform complex physical tasks through language-guided autonomy.
The key idea is to ground the language model in the robot's sensory inputs and motor capabilities, allowing the robot to understand and execute instructions conveyed through natural language. This could enable robots to follow high-level commands like "grab that object and place it on the table" rather than requiring detailed, low-level programming.
The authors propose a methodology for achieving this language-enabled autonomy, focusing on enabling robots to perform loco-manipulation tasks - the coordination of locomotion and object manipulation.
By combining language understanding with robotic control, the goal is to create more capable, versatile, and human-friendly AI systems that can assist and collaborate with people in a wide range of real-world applications.
Technical Explanation
The paper presents a framework for grounding language models in the context of autonomous loco-manipulation tasks for humanoid robots.
The key components of the methodology are:
- Language Model Integration: Incorporating a large language model, such as GPT, into the robot control architecture to enable understanding and generation of natural language.
- Multimodal Grounding: Aligning the language model's representations with the robot's sensory inputs (vision, proprioception) and action space through cross-modal learning.
- Hierarchical Planning: Decomposing high-level language instructions into a hierarchy of subtasks that can be executed by the robot's low-level control system.
- Uncertainty-Aware Execution: Incorporating uncertainty estimates from the language model and other components to enable robust and safe execution of language-guided behaviors.
The authors evaluate their approach through simulation experiments on a humanoid robot platform, demonstrating the robot's ability to follow natural language instructions to perform complex loco-manipulation tasks, such as navigating to a target location, picking up an object, and placing it on a designated surface.
Critical Analysis
The paper presents a promising approach for grounding language models in autonomous robotic systems, but it also acknowledges several limitations and areas for future work:
- The experiments are conducted in simulation, and the authors note that transferring the approach to real-world robot hardware introduces additional challenges that need to be addressed.
- The language model is pre-trained on general text data and not fine-tuned on robot-specific language, which may limit its performance on domain-specific instructions.
- The hierarchical planning approach relies on predefined task decompositions, which may not be scalable to more complex, open-ended scenarios.
- The uncertainty-aware execution module could be further improved to handle ambiguity and errors in language understanding more robustly.
Additionally, the paper does not discuss potential safety and ethical concerns associated with language-enabled robots, such as the risk of misunderstandings or the use of robots for harmful purposes. Addressing these issues will be crucial as the field of language-guided autonomy continues to advance.
Conclusion
The research presented in this paper represents an important step towards enabling humanoid robots to understand and execute complex instructions conveyed through natural language. By grounding language models in the robot's sensory and motor capabilities, the authors demonstrate the potential for more intuitive and versatile human-robot interaction.
While the current approach has limitations, the concepts and methodologies outlined in the paper lay the groundwork for further advancements in this field. As language-enabled robotics continues to evolve, it will be crucial to address safety, ethical, and scalability considerations to ensure these systems can be deployed responsibly and effectively in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Grounding Language Models in Autonomous Loco-manipulation Tasks
Jin Wang, Nikos Tsagarakis
Humanoid robots with behavioral autonomy have consistently been regarded as ideal collaborators in our daily lives and promising representations of embodied intelligence. Compared to fixed-based robotic arms, humanoid robots offer a larger operational space while significantly increasing the difficulty of control and planning. Despite the rapid progress towards general-purpose humanoid robots, most studies remain focused on locomotion ability with few investigations into whole-body coordination and tasks planning, thus limiting the potential to demonstrate long-horizon tasks involving both mobility and manipulation under open-ended verbal instructions. In this work, we propose a novel framework that learns, selects, and plans behaviors based on tasks in different scenarios. We combine reinforcement learning (RL) with whole-body optimization to generate robot motions and store them into a motion library. We further leverage the planning and reasoning features of the large language model (LLM), constructing a hierarchical task graph that comprises a series of motion primitives to bridge lower-level execution with higher-level planning. Experiments in simulation and real-world using the CENTAURO robot show that the language model based planner can efficiently adapt to new loco-manipulation tasks, demonstrating high autonomy from free-text commands in unstructured scenes.
Read more9/4/2024

0
Autonomous Behavior Planning For Humanoid Loco-manipulation Through Grounded Language Model
Jin Wang, Arturo Laurenzi, Nikos Tsagarakis
Enabling humanoid robots to perform autonomously loco-manipulation in unstructured environments is crucial and highly challenging for achieving embodied intelligence. This involves robots being able to plan their actions and behaviors in long-horizon tasks while using multi-modality to perceive deviations between task execution and high-level planning. Recently, large language models (LLMs) have demonstrated powerful planning and reasoning capabilities for comprehension and processing of semantic information through robot control tasks, as well as the usability of analytical judgment and decision-making for multi-modal inputs. To leverage the power of LLMs towards humanoid loco-manipulation, we propose a novel language-model based framework that enables robots to autonomously plan behaviors and low-level execution under given textual instructions, while observing and correcting failures that may occur during task execution. To systematically evaluate this framework in grounding LLMs, we created the robot 'action' and 'sensing' behavior library for task planning, and conducted mobile manipulation tasks and experiments in both simulated and real environments using the CENTAURO robot, and verified the effectiveness and application of this approach in robotic tasks with autonomous behavioral planning.
Read more8/16/2024

0
HYPERmotion: Learning Hybrid Behavior Planning for Autonomous Loco-manipulation
Jin Wang, Rui Dai, Weijie Wang, Luca Rossini, Francesco Ruscelli, Nikos Tsagarakis
Enabling robots to autonomously perform hybrid motions in diverse environments can be beneficial for long-horizon tasks such as material handling, household chores, and work assistance. This requires extensive exploitation of intrinsic motion capabilities, extraction of affordances from rich environmental information, and planning of physical interaction behaviors. Despite recent progress has demonstrated impressive humanoid whole-body control abilities, they struggle to achieve versatility and adaptability for new tasks. In this work, we propose HYPERmotion, a framework that learns, selects and plans behaviors based on tasks in different scenarios. We combine reinforcement learning with whole-body optimization to generate motion for 38 actuated joints and create a motion library to store the learned skills. We apply the planning and reasoning features of the large language models (LLMs) to complex loco-manipulation tasks, constructing a hierarchical task graph that comprises a series of primitive behaviors to bridge lower-level execution with higher-level planning. By leveraging the interaction of distilled spatial geometry and 2D observation with a visual language model (VLM) to ground knowledge into a robotic morphology selector to choose appropriate actions in single- or dual-arm, legged or wheeled locomotion. Experiments in simulation and real-world show that learned motions can efficiently adapt to new tasks, demonstrating high autonomy from free-text commands in unstructured scenes. Videos and website: hy-motion.github.io/
Read more6/24/2024
0
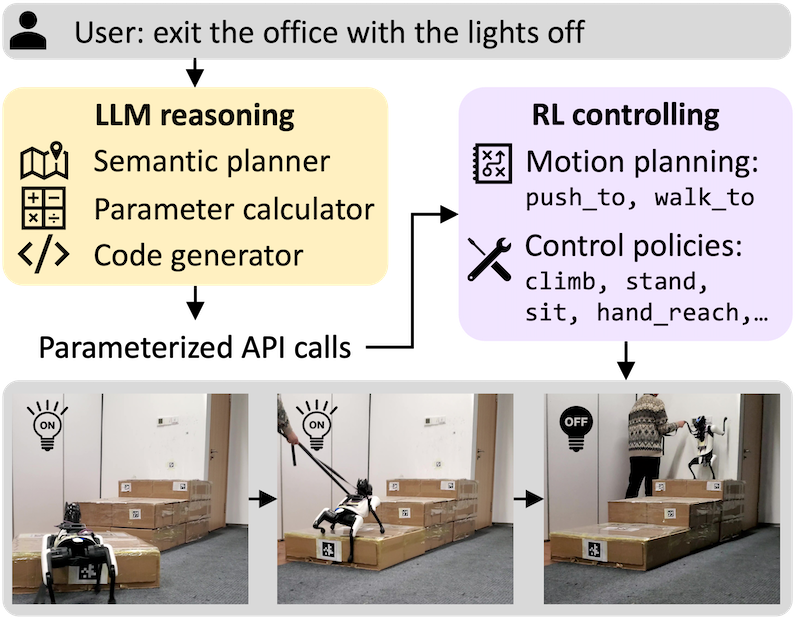
Long-horizon Locomotion and Manipulation on a Quadrupedal Robot with Large Language Models
Yutao Ouyang, Jinhan Li, Yunfei Li, Zhongyu Li, Chao Yu, Koushil Sreenath, Yi Wu
We present a large language model (LLM) based system to empower quadrupedal robots with problem-solving abilities for long-horizon tasks beyond short-term motions. Long-horizon tasks for quadrupeds are challenging since they require both a high-level understanding of the semantics of the problem for task planning and a broad range of locomotion and manipulation skills to interact with the environment. Our system builds a high-level reasoning layer with large language models, which generates hybrid discrete-continuous plans as robot code from task descriptions. It comprises multiple LLM agents: a semantic planner for sketching a plan, a parameter calculator for predicting arguments in the plan, and a code generator to convert the plan into executable robot code. At the low level, we adopt reinforcement learning to train a set of motion planning and control skills to unleash the flexibility of quadrupeds for rich environment interactions. Our system is tested on long-horizon tasks that are infeasible to complete with one single skill. Simulation and real-world experiments show that it successfully figures out multi-step strategies and demonstrates non-trivial behaviors, including building tools or notifying a human for help.
Read more4/9/2024