Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment
2404.14157
0
0
Abstract
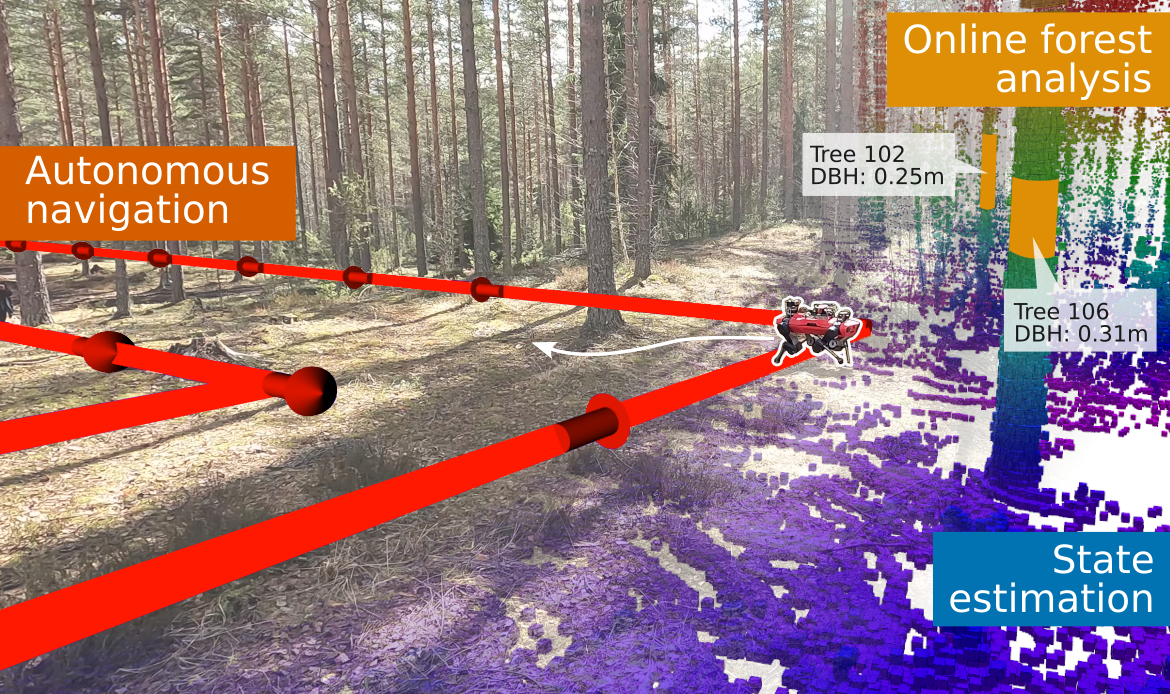
We present a solution for autonomous forest inventory with a legged robotic platform. Compared to their wheeled and aerial counterparts, legged platforms offer an attractive balance of endurance and low soil impact for forest applications. In this paper, we present the complete system architecture of our forest inventory solution which includes state estimation, navigation, mission planning, and real-time tree segmentation and trait estimation. We present preliminary results for three campaigns in forests in Finland and the UK and summarize the main outcomes, lessons, and challenges. Our UK experiment at the Forest of Dean with the ANYmal D legged platform, achieved an autonomous survey of a 0.96 hectare plot in 20 min, identifying over 100 trees with typical DBH accuracy of 2 cm.
Create account to get full access
Overview
- This paper presents the design and field deployment of an autonomous forest inventory system using legged robots.
- The system combines several key technologies, including ground-mobile robot autonomous terrestrial laser scanning, adaptive force-based control for dynamic legged locomotion, and under-canopy navigation using aerial LiDAR maps.
- The goal is to enable efficient, large-scale forest monitoring and inventory collection while minimizing human involvement.
Plain English Explanation
The paper describes a system that uses legged robots to automatically survey and measure forests. These robots can navigate through dense forest environments without human control, using a combination of technologies. They can scan the forest with lasers to create 3D maps, move around using force-based control of their legs, and find their way under the forest canopy using aerial maps. The aim is to make it faster and easier to collect detailed data about the trees and other features in large forest areas, without needing people to physically go out and collect the information. This could be useful for forest management, monitoring changes over time, and other applications that require comprehensive forest inventories.
Technical Explanation
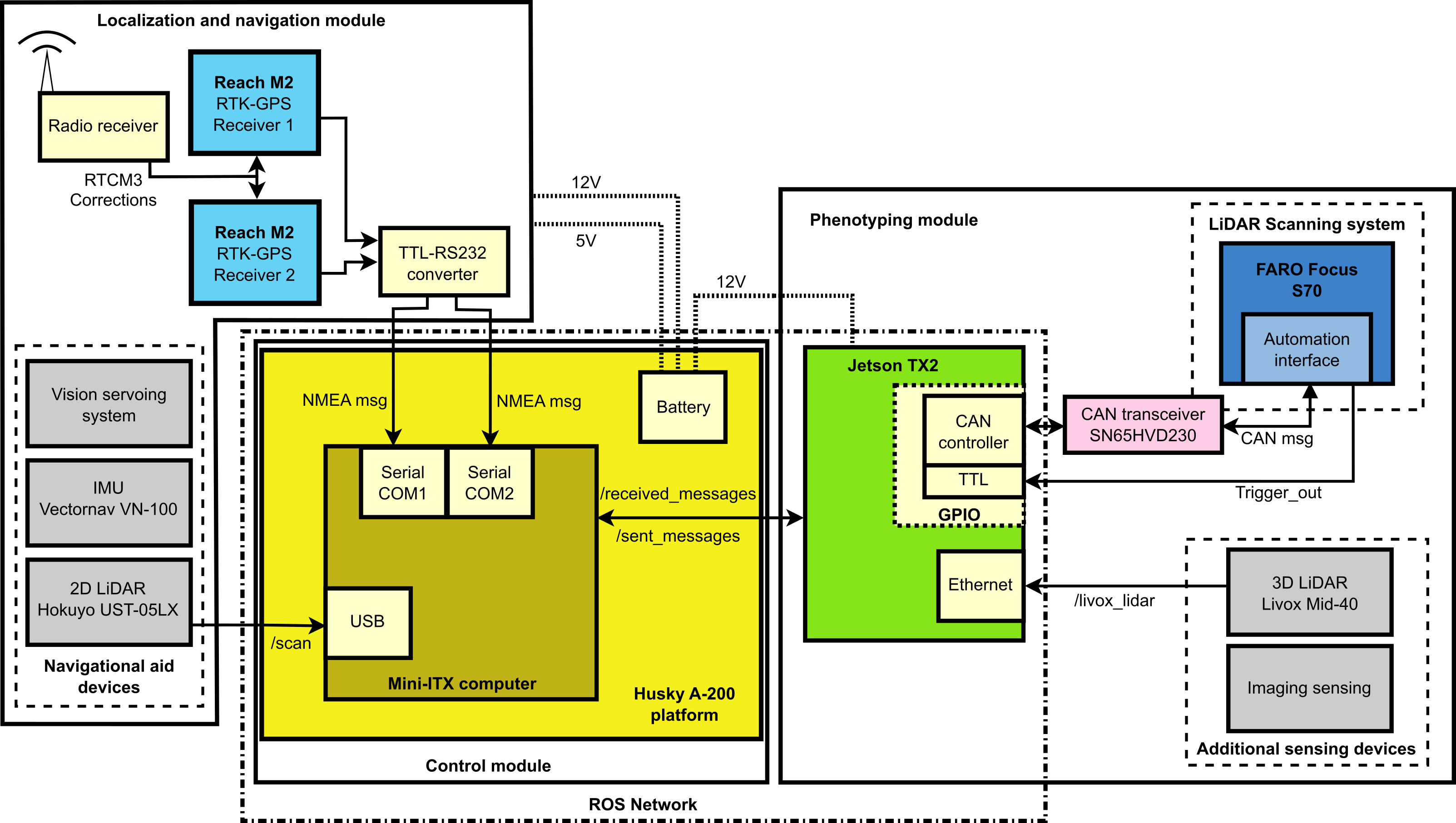
The key components of the system include:
- Ground-mobile robot autonomous terrestrial laser scanning: The legged robots are equipped with LiDAR sensors that can create high-resolution 3D point cloud models of the forest environment as the robots move through it.
- Adaptive force-based control for dynamic legged locomotion: The robots use a force-based control system to navigate the rough, uneven terrain of the forest floor, allowing them to move efficiently and stably without getting stuck.
- Under-canopy navigation using aerial LiDAR maps: In addition to the onboard sensors, the robots utilize pre-existing aerial LiDAR maps of the forest to localize themselves and plan navigation paths that avoid obstacles under the dense tree canopy.
- Tree detection and geometric traits estimation: The 3D point cloud data collected by the robots is processed to automatically detect individual trees and measure their size, shape, and other attributes.
The researchers conducted field deployments of the system in several forested areas to assess its performance in real-world conditions. The results demonstrate the feasibility of using legged robots for large-scale, autonomous forest inventory data collection.
Critical Analysis
The paper acknowledges some limitations of the current system, such as the need for prior aerial LiDAR data, which may not be available in all forest environments. Additionally, the accuracy of the tree detection and measurement algorithms could be further improved.
One potential concern is the potential impact on forest ecosystems from the presence of autonomous robots traversing the environment. While the paper states that the robots are designed to minimize disturbance, the long-term effects of this technology on sensitive forest habitats and wildlife should be carefully considered.
Further research could explore ways to make the system more self-sufficient, perhaps by incorporating long-term visual navigation capabilities to reduce reliance on external data sources. Expanding the types of measurements and observations the robots can collect could also enhance the utility of the system for various forest management applications.
Conclusion
This paper presents a promising approach to automating the tedious and labor-intensive task of forest inventory data collection. By leveraging legged robot technology and advanced sensing and navigation capabilities, the system has the potential to enable more comprehensive, frequent, and cost-effective monitoring of forest resources. As the technology continues to evolve, it could become a valuable tool for supporting sustainable forest management, tracking environmental changes, and informing conservation efforts.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers

Learning Robust Autonomous Navigation and Locomotion for Wheeled-Legged Robots
Joonho Lee, Marko Bjelonic, Alexander Reske, Lorenz Wellhausen, Takahiro Miki, Marco Hutter
0
0
Autonomous wheeled-legged robots have the potential to transform logistics systems, improving operational efficiency and adaptability in urban environments. Navigating urban environments, however, poses unique challenges for robots, necessitating innovative solutions for locomotion and navigation. These challenges include the need for adaptive locomotion across varied terrains and the ability to navigate efficiently around complex dynamic obstacles. This work introduces a fully integrated system comprising adaptive locomotion control, mobility-aware local navigation planning, and large-scale path planning within the city. Using model-free reinforcement learning (RL) techniques and privileged learning, we develop a versatile locomotion controller. This controller achieves efficient and robust locomotion over various rough terrains, facilitated by smooth transitions between walking and driving modes. It is tightly integrated with a learned navigation controller through a hierarchical RL framework, enabling effective navigation through challenging terrain and various obstacles at high speed. Our controllers are integrated into a large-scale urban navigation system and validated by autonomous, kilometer-scale navigation missions conducted in Zurich, Switzerland, and Seville, Spain. These missions demonstrate the system's robustness and adaptability, underscoring the importance of integrated control systems in achieving seamless navigation in complex environments. Our findings support the feasibility of wheeled-legged robots and hierarchical RL for autonomous navigation, with implications for last-mile delivery and beyond.
5/6/2024
A Ground Mobile Robot for Autonomous Terrestrial Laser Scanning-Based Field Phenotyping
Javier Rodriguez-Sanchez, Kyle Johnsen, Changying Li
0
0
Traditional field phenotyping methods are often manual, time-consuming, and destructive, posing a challenge for breeding progress. To address this bottleneck, robotics and automation technologies offer efficient sensing tools to monitor field evolution and crop development throughout the season. This study aimed to develop an autonomous ground robotic system for LiDAR-based field phenotyping in plant breeding trials. A Husky platform was equipped with a high-resolution three-dimensional (3D) laser scanner to collect in-field terrestrial laser scanning (TLS) data without human intervention. To automate the TLS process, a 3D ray casting analysis was implemented for optimal TLS site planning, and a route optimization algorithm was utilized to minimize travel distance during data collection. The platform was deployed in two cotton breeding fields for evaluation, where it autonomously collected TLS data. The system provided accurate pose information through RTK-GNSS positioning and sensor fusion techniques, with average errors of less than 0.6 cm for location and 0.38$^{circ}$ for heading. The achieved localization accuracy allowed point cloud registration with mean point errors of approximately 2 cm, comparable to traditional TLS methods that rely on artificial targets and manual sensor deployment. This work presents an autonomous phenotyping platform that facilitates the quantitative assessment of plant traits under field conditions of both large agricultural fields and small breeding trials to contribute to the advancement of plant phenomics and breeding programs.
4/9/2024

Adaptive Force-Based Control of Dynamic Legged Locomotion over Uneven Terrain
Mohsen Sombolestan, Quan Nguyen
0
0
Agile-legged robots have proven to be highly effective in navigating and performing tasks in complex and challenging environments, including disaster zones and industrial settings. However, these applications normally require the capability of carrying heavy loads while maintaining dynamic motion. Therefore, this paper presents a novel methodology for incorporating adaptive control into a force-based control system. Recent advancements in the control of quadruped robots show that force control can effectively realize dynamic locomotion over rough terrain. By integrating adaptive control into the force-based controller, our proposed approach can maintain the advantages of the baseline framework while adapting to significant model uncertainties and unknown terrain impact models. Experimental validation was successfully conducted on the Unitree A1 robot. With our approach, the robot can carry heavy loads (up to 50% of its weight) while performing dynamic gaits such as fast trotting and bounding across uneven terrains.
4/9/2024

Crash Landing onto you: Untethered Soft Aerial Robots for Safe Environmental Interaction, Sensing, and Perching
Pham Huy Nguyen
0
0
There are various desired capabilities to create aerial forest-traversing robots capable of monitoring both biological and abiotic data. The features range from multi-functionality, robustness, and adaptability. These robots have to weather turbulent winds and various obstacles such as forest flora and wildlife thus amplifying the complexity of operating in such uncertain environments. The key for successful data collection is the flexibility to intermittently move from tree-to-tree, in order to perch at vantage locations for elongated time. This effort to perch not only reduces the disturbance caused by multi-rotor systems during data collection, but also allows the system to rest and recharge for longer outdoor missions. Current systems feature the addition of perching modules that increase the aerial robots' weight and reduce the drone's overall endurance. Thus in our work, the key questions currently studied are: How do we develop a single robot capable of metamorphosing its body for multi-modal flight and dynamic perching?, How do we detect and land on perchable objects robustly and dynamically?, and What important spatial-temporal data is important for us to collect?
5/27/2024