A Ground Mobile Robot for Autonomous Terrestrial Laser Scanning-Based Field Phenotyping
2404.04404
0
0
Abstract
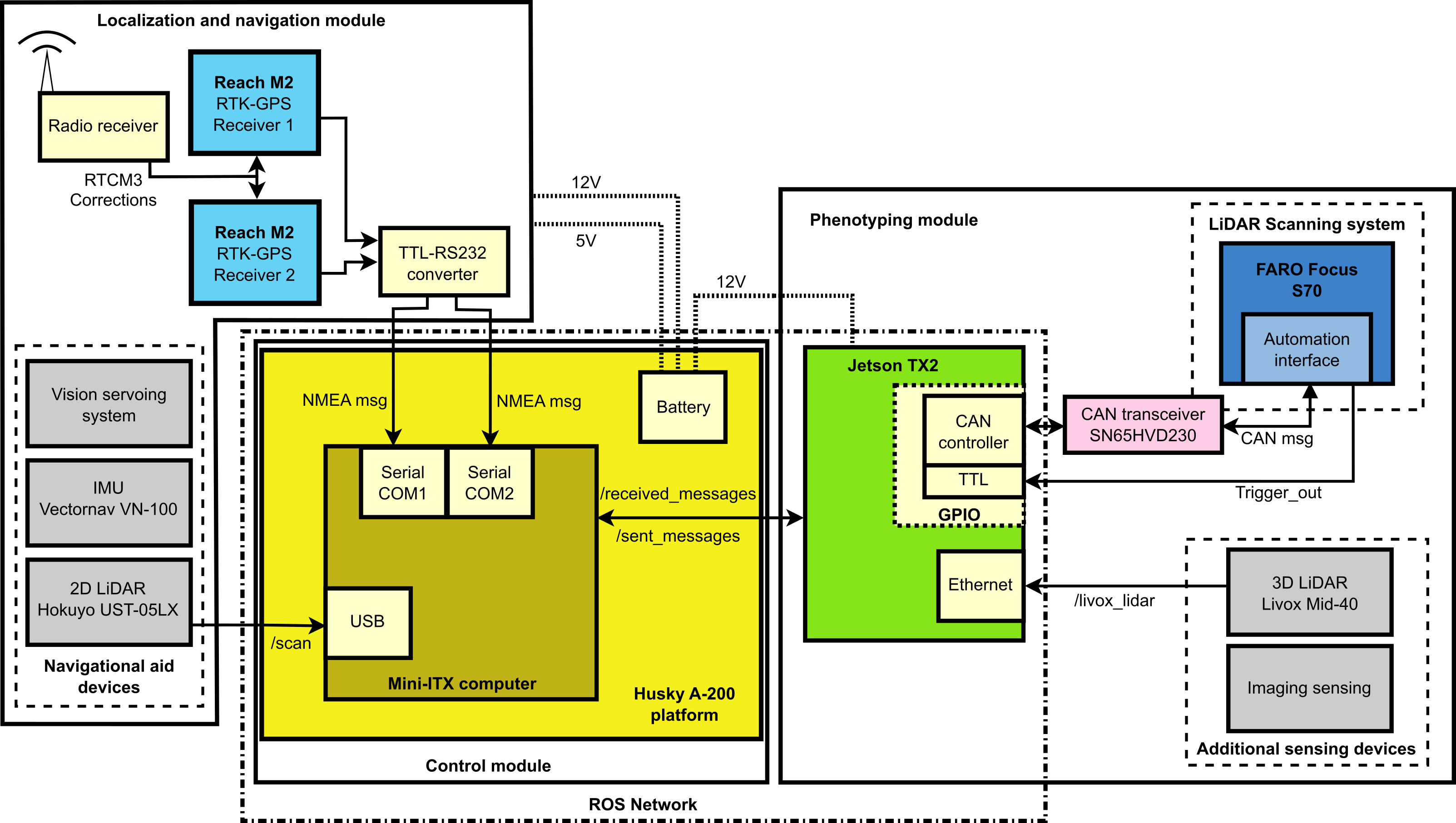
Traditional field phenotyping methods are often manual, time-consuming, and destructive, posing a challenge for breeding progress. To address this bottleneck, robotics and automation technologies offer efficient sensing tools to monitor field evolution and crop development throughout the season. This study aimed to develop an autonomous ground robotic system for LiDAR-based field phenotyping in plant breeding trials. A Husky platform was equipped with a high-resolution three-dimensional (3D) laser scanner to collect in-field terrestrial laser scanning (TLS) data without human intervention. To automate the TLS process, a 3D ray casting analysis was implemented for optimal TLS site planning, and a route optimization algorithm was utilized to minimize travel distance during data collection. The platform was deployed in two cotton breeding fields for evaluation, where it autonomously collected TLS data. The system provided accurate pose information through RTK-GNSS positioning and sensor fusion techniques, with average errors of less than 0.6 cm for location and 0.38$^{circ}$ for heading. The achieved localization accuracy allowed point cloud registration with mean point errors of approximately 2 cm, comparable to traditional TLS methods that rely on artificial targets and manual sensor deployment. This work presents an autonomous phenotyping platform that facilitates the quantitative assessment of plant traits under field conditions of both large agricultural fields and small breeding trials to contribute to the advancement of plant phenomics and breeding programs.
Create account to get full access
Overview
- This paper presents a ground mobile robot for autonomous terrestrial laser scanning-based field phenotyping.
- The robot is designed to capture high-resolution 3D data of plants in an agricultural field, enabling detailed analysis of plant traits and growth.
- The system integrates a LiDAR sensor, GPS, and other sensors to navigate the field and collect data without human intervention.
Plain English Explanation
The researchers have developed a robot that can autonomously navigate through agricultural fields and capture detailed 3D scans of the plants. This allows for a more thorough and objective analysis of plant traits, such as height, leaf structure, and growth patterns, which is important for plant breeding and crop optimization.
The robot uses a LiDAR sensor, which is similar to radar but uses light instead of radio waves, to build a 3D map of the environment. It also has a GPS system to know its location in the field. This allows the robot to navigate through the field on its own, scanning the plants without the need for human intervention.
The high-resolution 3D data collected by the robot can provide valuable insights into plant growth and development that would be difficult to obtain through manual observation or traditional measurement techniques. This information can then be used by researchers and farmers to breed better crop varieties, optimize planting and management practices, and ultimately improve agricultural productivity.
Technical Explanation
The paper describes the design and implementation of a ground mobile robot for autonomous terrestrial laser scanning-based field phenotyping. The robot is equipped with a LiDAR sensor, GPS, and other sensors to navigate through the field and collect high-resolution 3D data of the plants.
The robot's navigation system uses the LiDAR data to build a 3D map of the environment, which it then uses to plan and execute a path through the field. The GPS provides the robot's location, allowing it to cover the entire field and avoid missing any areas.
The LiDAR sensor is used to capture detailed 3D scans of the plants, which can be analyzed to extract a wide range of phenotypic traits, such as plant height, leaf area, and stem diameter. This information can be used by plant breeders and agronomists to evaluate and improve crop varieties.
The researchers conducted field trials to evaluate the robot's performance and the quality of the data it collected. The results showed that the robot was able to navigate the field autonomously and capture high-quality 3D data of the plants, demonstrating the potential of this technology for large-scale, high-throughput field phenotyping.
Critical Analysis
The paper presents a promising approach to automating the process of field phenotyping, which is a crucial component of plant breeding and precision agriculture. The use of a ground mobile robot equipped with LiDAR and other sensors allows for the collection of detailed 3D data on plant traits in a scalable and efficient manner.
However, the paper does not address some potential limitations of the system. For example, the authors do not discuss the robot's ability to navigate in complex or unstructured environments, such as fields with dense vegetation or uneven terrain. Additionally, the paper does not provide information on the robustness of the system to environmental factors, such as changes in lighting or weather conditions, which could impact the quality of the data collected.
Further research may be needed to explore these potential limitations and to investigate ways to improve the reliability and versatility of the robot platform. Additionally, the integration of this technology with other data sources, such as drone-based imaging or satellite data, could provide a more comprehensive picture of plant growth and development in the field.
Conclusion
The ground mobile robot presented in this paper represents an important step forward in the automation of field phenotyping, a critical task for plant breeding and precision agriculture. By using LiDAR and other sensors, the robot can capture high-resolution 3D data on plant traits without the need for human intervention, potentially enabling more scalable and objective evaluation of crop varieties.
While the paper highlights the technical capabilities of the robot, further research is needed to address potential limitations and explore ways to integrate this technology with other data sources. Nevertheless, the development of autonomous field phenotyping platforms like the one described in this paper holds great promise for advancing our understanding of plant biology and improving agricultural productivity.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
On-the-Go Tree Detection and Geometric Traits Estimation with Ground Mobile Robots in Fruit Tree Groves
Dimitrios Chatziparaschis, Hanzhe Teng, Yipeng Wang, Pamodya Peiris, Elia Scudiero, Konstantinos Karydis
0
0
By-tree information gathering is an essential task in precision agriculture achieved by ground mobile sensors, but it can be time- and labor-intensive. In this paper we present an algorithmic framework to perform real-time and on-the-go detection of trees and key geometric characteristics (namely, width and height) with wheeled mobile robots in the field. Our method is based on the fusion of 2D domain-specific data (normalized difference vegetation index [NDVI] acquired via a red-green-near-infrared [RGN] camera) and 3D LiDAR point clouds, via a customized tree landmark association and parameter estimation algorithm. The proposed system features a multi-modal and entropy-based landmark correspondences approach, integrated into an underlying Kalman filter system to recognize the surrounding trees and jointly estimate their spatial and vegetation-based characteristics. Realistic simulated tests are used to evaluate our proposed algorithm's behavior in a variety of settings. Physical experiments in agricultural fields help validate our method's efficacy in acquiring accurate by-tree information on-the-go and in real-time by employing only onboard computational and sensing resources.
4/4/2024

LiDAR-Based Crop Row Detection Algorithm for Over-Canopy Autonomous Navigation in Agriculture Fields
Ruiji Liu, Francisco Yandun, George Kantor
0
0
Autonomous navigation is crucial for various robotics applications in agriculture. However, many existing methods depend on RTK-GPS systems, which are expensive and susceptible to poor signal coverage. This paper introduces a state-of-the-art LiDAR-based navigation system that can achieve over-canopy autonomous navigation in row-crop fields, even when the canopy fully blocks the interrow spacing. Our crop row detection algorithm can detect crop rows across diverse scenarios, encompassing various crop types, growth stages, weeds presence, and discontinuities within the crop rows. Without utilizing the global localization of the robot, our navigation system can perform autonomous navigation in these challenging scenarios, detect the end of the crop rows, and navigate to the next crop row autonomously, providing a crop-agnostic approach to navigate the whole row-crop field. This navigation system has undergone tests in various simulated agricultural fields, achieving an average of 2.98cm autonomous driving accuracy without human intervention on the custom Amiga robot. In addition, the qualitative results of our crop row detection algorithm from the actual soybean fields validate our LiDAR-based crop row detection algorithm's potential for practical agricultural applications.
5/9/2024
🛸
AHPPEBot: Autonomous Robot for Tomato Harvesting based on Phenotyping and Pose Estimation
Xingxu Li, Nan Ma, Yiheng Han, Shun Yang, Siyi Zheng
0
0
To address the limitations inherent to conventional automated harvesting robots specifically their suboptimal success rates and risk of crop damage, we design a novel bot named AHPPEBot which is capable of autonomous harvesting based on crop phenotyping and pose estimation. Specifically, In phenotyping, the detection, association, and maturity estimation of tomato trusses and individual fruits are accomplished through a multi-task YOLOv5 model coupled with a detection-based adaptive DBScan clustering algorithm. In pose estimation, we employ a deep learning model to predict seven semantic keypoints on the pedicel. These keypoints assist in the robot's path planning, minimize target contact, and facilitate the use of our specialized end effector for harvesting. In autonomous tomato harvesting experiments conducted in commercial greenhouses, our proposed robot achieved a harvesting success rate of 86.67%, with an average successful harvest time of 32.46 s, showcasing its continuous and robust harvesting capabilities. The result underscores the potential of harvesting robots to bridge the labor gap in agriculture.
5/14/2024
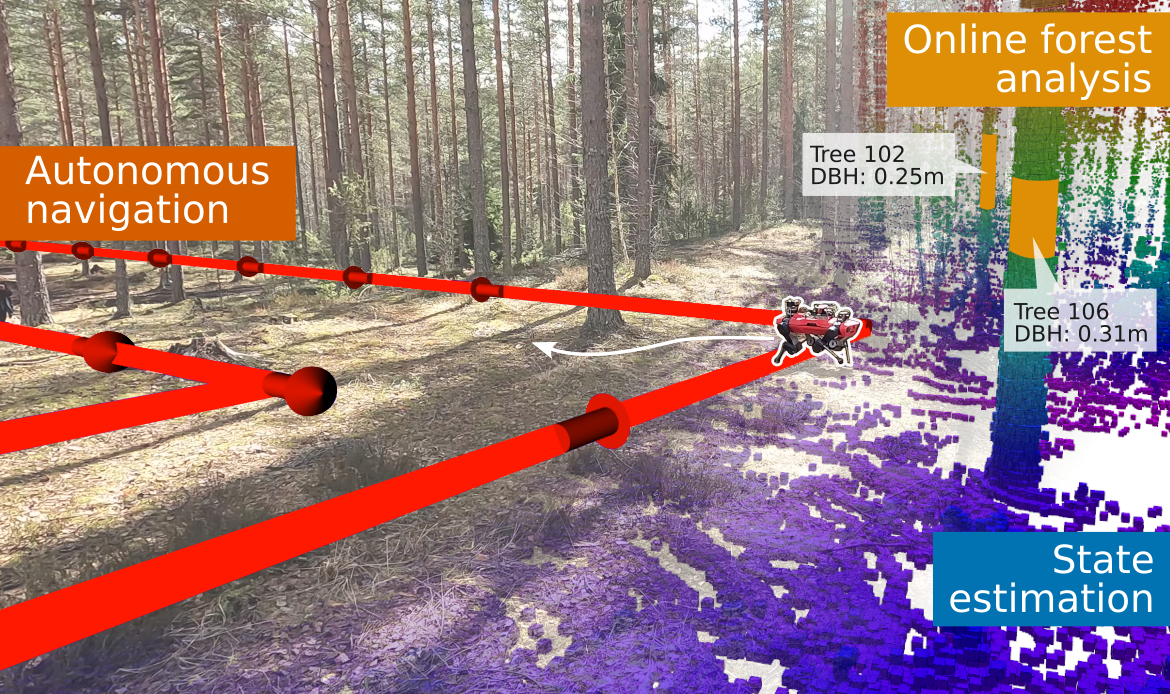
Autonomous Forest Inventory with Legged Robots: System Design and Field Deployment
Mat'ias Mattamala, Nived Chebrolu, Benoit Casseau, Leonard Frei{ss}muth, Jonas Frey, Turcan Tuna, Marco Hutter, Maurice Fallon
0
0
We present a solution for autonomous forest inventory with a legged robotic platform. Compared to their wheeled and aerial counterparts, legged platforms offer an attractive balance of endurance and low soil impact for forest applications. In this paper, we present the complete system architecture of our forest inventory solution which includes state estimation, navigation, mission planning, and real-time tree segmentation and trait estimation. We present preliminary results for three campaigns in forests in Finland and the UK and summarize the main outcomes, lessons, and challenges. Our UK experiment at the Forest of Dean with the ANYmal D legged platform, achieved an autonomous survey of a 0.96 hectare plot in 20 min, identifying over 100 trees with typical DBH accuracy of 2 cm.
4/23/2024