An Autonomous Vision-Based Algorithm for Interplanetary Navigation
2309.09590
0
0
🔍
Abstract
The surge of deep-space probes makes it unsustainable to navigate them with standard radiometric tracking. Self-driving interplanetary satellites represent a solution to this problem. In this work, a full vision-based navigation algorithm is built by combining an orbit determination method with an image processing pipeline suitable for interplanetary transfers of autonomous platforms. To increase the computational efficiency of the algorithm, a non-dimensional extended Kalman filter is selected as state estimator, fed by the positions of the planets extracted from deep-space images. An enhancement of the estimation accuracy is performed by applying an optimal strategy to select the best pair of planets to track. Moreover, a novel analytical measurement model for deep-space navigation is developed providing a first-order approximation of the light-aberration and light-time effects. Algorithm performance is tested on a high-fidelity, Earth--Mars interplanetary transfer, showing the algorithm applicability for deep-space navigation.
Create account to get full access
Overview
- Deep-space probes are becoming more common, making it challenging to track them using standard radiometric techniques.
- Autonomous, vision-based navigation could be a solution to this problem.
- This paper presents a vision-based navigation algorithm that combines orbit determination and image processing for self-driving interplanetary satellites.
- The algorithm aims to improve computational efficiency and estimation accuracy for deep-space navigation.
Plain English Explanation
As more and more spacecraft are sent to explore the far reaches of our solar system, the traditional way of tracking them using radio signals is becoming increasingly difficult to manage. This paper proposes a new approach that relies on visual information rather than radio signals to help these autonomous spacecraft navigate on their own.
The key idea is to use images of the planets and stars captured by the spacecraft's cameras to figure out where the spacecraft is and where it's going. By processing these images, the algorithm can estimate the spacecraft's position and orientation without needing to constantly communicate with ground control.
To make this approach more efficient, the researchers chose a special type of mathematical model called a "non-dimensional extended Kalman filter" to process the image data. This helps the algorithm run quickly and accurately. They also developed a way to select the best pair of planets to focus on in the images, which further improves the navigation accuracy.
Finally, the paper describes a new mathematical model that accounts for the effects of light travel time and the apparent motion of celestial bodies, which are important factors for deep-space navigation. The researchers tested the algorithm on a simulated journey from Earth to Mars and showed that it could effectively guide the spacecraft without needing constant communication with Earth.
Technical Explanation
The paper presents a full vision-based navigation algorithm for autonomous interplanetary satellites, combining an orbit determination method with an image processing pipeline. To improve computational efficiency, a non-dimensional extended Kalman filter [1] is used as the state estimator, fed by the positions of planets extracted from deep-space images.
An enhancement of the estimation accuracy is achieved by applying an optimal strategy to select the best pair of planets to track. This approach leverages the relative positions of the planets to improve the navigation solution.
Additionally, the authors develop a novel analytical measurement model for deep-space navigation, providing a first-order approximation of the light-aberration and light-time effects. These effects are crucial for accurate deep-space navigation, as the apparent positions of celestial bodies can shift due to the finite speed of light.
The algorithm's performance is evaluated on a high-fidelity simulation of an Earth-Mars interplanetary transfer. The results demonstrate the applicability of the vision-based navigation approach for autonomous deep-space missions, reducing the need for constant communication with ground control.
Critical Analysis
The proposed vision-based navigation algorithm represents a promising solution to the challenges posed by the growing number of deep-space probes. By leveraging on-board image processing and optimal planet selection, the algorithm can potentially reduce the computational and communication burden on ground control.
However, the paper does not fully address the impact of various factors that could affect the algorithm's performance in real-world scenarios. For example, the effects of sensor noise, image quality, and environmental conditions (such as solar radiation or dust) on the algorithm's accuracy and reliability are not thoroughly discussed.
Additionally, the authors acknowledge that the light-aberration and light-time effects modeled in the measurement model may not fully capture the complexities of deep-space navigation. Further research may be needed to refine the analytical model or explore more sophisticated approaches, such as those used in PathFinder: Attention-Driven Dynamic Non-Line-of-Sight Navigation.
While the simulation results are promising, it would be valuable to see the algorithm tested on more diverse and challenging deep-space scenarios, including longer-duration missions or more complex interplanetary trajectories. This could help identify additional limitations or areas for improvement.
Conclusion
The vision-based navigation algorithm presented in this paper offers a potential solution to the growing challenges of tracking and guiding deep-space probes using traditional radiometric methods. By leveraging on-board image processing and optimized planet selection, the algorithm can improve the computational efficiency and accuracy of autonomous interplanetary navigation.
The development of such vision-based techniques is an important step towards enabling more self-reliant and cost-effective deep-space exploration missions, reducing the need for constant communication with ground control. As the number of deep-space probes continues to increase, this research represents a valuable contribution to the field of autonomous spacecraft navigation.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
A Novel Methodology for Autonomous Planetary Exploration Using Multi-Robot Teams
Sarah Swinton, Jan-Hendrik Ewers, Euan McGookin, David Anderson, Douglas Thomson
0
0
One of the fundamental limiting factors in planetary exploration is the autonomous capabilities of planetary exploration rovers. This study proposes a novel methodology for trustworthy autonomous multi-robot teams which incorporates data from multiple sources (HiRISE orbiter imaging, probability distribution maps, and on-board rover sensors) to find efficient exploration routes in Jezero crater. A map is generated, consisting of a 3D terrain model, traversability analysis, and probability distribution map of points of scientific interest. A three-stage mission planner generates an efficient route, which maximises the accumulated probability of identifying points of interest. A 4D RRT* algorithm is used to determine smooth, flat paths, and prioritised planning is used to coordinate a safe set of paths. The above methodology is shown to coordinate safe and efficient rover paths, which ensure the rovers remain within their nominal pitch and roll limits throughout operation.
5/22/2024

ShadowNav: Autonomous Global Localization for Lunar Navigation in Darkness
Deegan Atha, R. Michael Swan, Abhishek Cauligi, Anne Bettens, Edwin Goh, Dima Kogan, Larry Matthies, Masahiro Ono
0
0
The ability to determine the pose of a rover in an inertial frame autonomously is a crucial capability necessary for the next generation of surface rover missions on other planetary bodies. Currently, most on-going rover missions utilize ground-in-the-loop interventions to manually correct for drift in the pose estimate and this human supervision bottlenecks the distance over which rovers can operate autonomously and carry out scientific measurements. In this paper, we present ShadowNav, an autonomous approach for global localization on the Moon with an emphasis on driving in darkness and at nighttime. Our approach uses the leading edge of Lunar craters as landmarks and a particle filtering approach is used to associate detected craters with known ones on an offboard map. We discuss the key design decisions in developing the ShadowNav framework for use with a Lunar rover concept equipped with a stereo camera and an external illumination source. Finally, we demonstrate the efficacy of our proposed approach in both a Lunar simulation environment and on data collected during a field test at Cinder Lakes, Arizona.
5/7/2024

Under-Canopy Navigation using Aerial Lidar Maps
Lucas Carvalho de Lima, Nicholas Lawrance, Kasra Khosoussi, Paulo Borges, Michael Bruenig
0
0
Autonomous navigation in unstructured natural environments poses a significant challenge. In goal navigation tasks without prior information, the limited look-ahead of onboard sensors utilised by robots compromises path efficiency. We propose a novel approach that leverages an above-the-canopy aerial map for improved ground robot navigation. Our system utilises aerial lidar scans to create a 3D probabilistic occupancy map, uniquely incorporating the uncertainty in the aerial vehicle's trajectory for improved accuracy. Novel path planning cost functions are introduced, combining path length with obstruction risk estimated from the probabilistic map. The D-Star Lite algorithm then calculates an optimal (minimum-cost) path to the goal. This system also allows for dynamic replanning upon encountering unforeseen obstacles on the ground. Extensive experiments and ablation studies in simulated and real forests demonstrate the effectiveness of our system.
6/19/2024
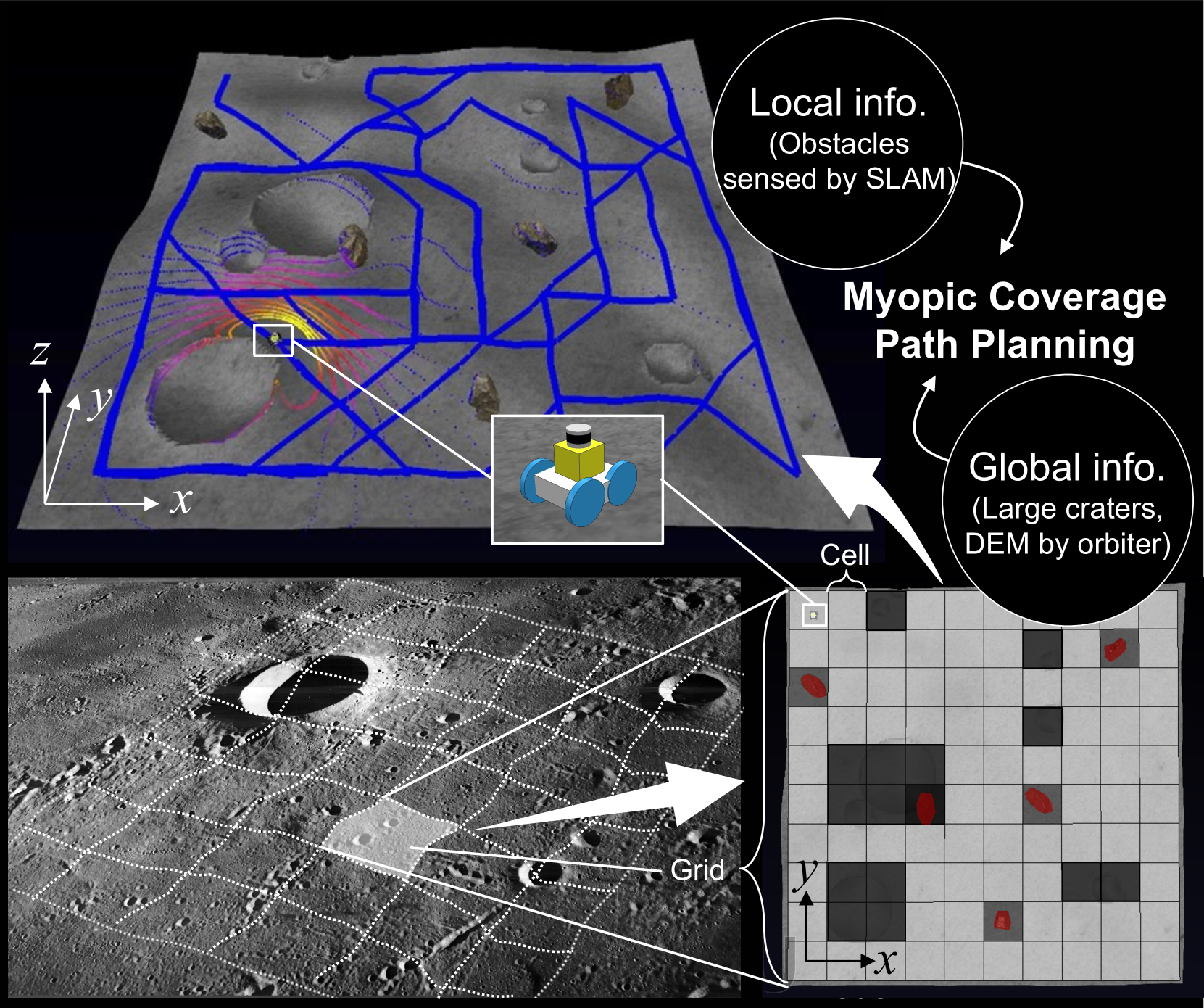
Risk-Aware Coverage Path Planning for Lunar Micro-Rovers Leveraging Global and Local Environmental Data
Shreya Santra, Kentaro Uno, Gen Kudo, Kazuya Yoshida
0
0
This paper presents a novel 3D myopic coverage path planning algorithm for lunar micro-rovers that can explore unknown environments with limited sensing and computational capabilities. The algorithm expands upon traditional non-graph path planning methods to accommodate the complexities of lunar terrain, utilizing global data with local topographic features into motion cost calculations. The algorithm also integrates localization and mapping to update the rover's pose and map the environment. The resulting environment map's accuracy is evaluated and tested in a 3D simulator. Outdoor field tests were conducted to validate the algorithm's efficacy in sim-to-real scenarios. The results showed that the algorithm could achieve high coverage with low energy consumption and computational cost, while incrementally exploring the terrain and avoiding obstacles. This study contributes to the advancement of path planning methodologies for space exploration, paving the way for efficient, scalable and autonomous exploration of lunar environments by small rovers.
4/30/2024