SONIC: Sonar Image Correspondence using Pose Supervised Learning for Imaging Sonars

0
🖼️
Sign in to get full access
Overview
- This paper addresses the challenge of data association for underwater SLAM (Simultaneous Localization and Mapping) using a novel method for sonar image correspondence.
- The proposed method, called SONIC (SONar Image Correspondence), is a pose-supervised network designed to yield robust feature correspondence capable of handling viewpoint variations.
- Underwater environments present complex challenges for perception systems, with dynamic and often limited visibility conditions that restrict vision to a few meters of often featureless expanses.
- Multibeam imaging sonars are the preferred choice for perception sensors in open water scenarios, but their measurements can appear different from varying viewpoints, presenting challenges for data association.
- The researchers demonstrate that their method significantly improves the performance of generating correspondences for sonar images, paving the way for more accurate loop closure constraints and sonar-based place recognition.
Plain English Explanation
Underwater robots, known as Autonomous Underwater Vehicles (AUVs), often need to create detailed maps of their environment as they explore. This process, called Simultaneous Localization and Mapping (SLAM), is crucial for navigation and understanding the underwater world.
One of the key challenges in underwater SLAM is the process of "data association," which involves matching up features or landmarks in the environment as the AUV moves around. This is particularly difficult in underwater environments because the visibility is often very limited, and the seafloor may be relatively featureless.
To address this challenge, the researchers in this paper developed a new method called SONIC (SONar Image Correspondence). SONIC is a machine learning-based system that can identify and match features in sonar images, even when the AUV's viewpoint changes. This is important because sonar images can look quite different depending on the angle and position of the sonar sensor.
By improving the ability to associate data from sonar images, the SONIC system can help AUVs create more accurate maps of their surroundings. This, in turn, can improve their navigation and exploration capabilities, making it easier for them to survey the seafloor and identify important features or objects of interest.
The researchers have made their code and datasets publicly available, which should help other researchers and engineers continue to develop and improve upon this important technology for underwater robotics.
Technical Explanation
The paper introduces SONIC (SONar Image Correspondence), a pose-supervised network designed to yield robust feature correspondence for sonar images. This is a crucial capability for underwater SLAM systems, which rely on accurately matching features or landmarks in the environment as the robot moves around.
Underwater environments present significant challenges for perception systems, such as dynamic and often limited visibility conditions that restrict vision to a few meters of often featureless expanses. As a result, multibeam imaging sonars have emerged as the preferred choice for perception sensors in open water scenarios.
However, while imaging sonars offer superior long-range visibility compared to cameras, their measurements can appear different from varying viewpoints. This inherent variability presents formidable challenges in data association, particularly for feature-based methods. The researchers demonstrate that their SONIC method significantly improves the performance of generating correspondences for sonar images, which will enable more accurate loop closure constraints and sonar-based place recognition.
The paper also announces the public release of the code and datasets used in the study, which should facilitate further development and research in this field.
Critical Analysis
The paper presents a promising approach to addressing a critical challenge in underwater robotics and SLAM. By developing a machine learning-based system for robust sonar image correspondence, the researchers have taken an important step towards overcoming the limitations of camera-based perception in underwater environments.
One potential area for further research could be exploring the use of multi-view or mesh-based techniques to further enhance the accuracy and robustness of the sonar-based perception system. Additionally, integrating the SONIC method with robust visual-inertial SLAM approaches could potentially yield even more accurate and reliable underwater mapping capabilities.
While the paper demonstrates the effectiveness of the SONIC method on both simulated and real-world datasets, it would be valuable to see further validation of the approach in more diverse and challenging underwater environments. Additionally, the researchers could explore the scalability of the method as the size and complexity of the underwater environments increase.
Overall, the work presented in this paper represents an important contribution to the field of underwater robotics and SLAM, and the public release of the code and datasets will undoubtedly spur further advancements in this critical area of research.
Conclusion
This paper addresses the challenge of data association for underwater SLAM through the introduction of a novel method called SONIC (SONar Image Correspondence). The SONIC system is a pose-supervised network designed to yield robust feature correspondence for sonar images, which is crucial for addressing the complex challenges of underwater perception.
By improving the ability to associate data from sonar images, the SONIC system can enable more accurate mapping and navigation for Autonomous Underwater Vehicles (AUVs), ultimately enhancing their ability to survey and explore the underwater world. The public release of the code and datasets used in this study will undoubtedly spur further research and development in this important field, paving the way for more advanced and capable underwater robotics systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🖼️
0
SONIC: Sonar Image Correspondence using Pose Supervised Learning for Imaging Sonars
Samiran Gode, Akshay Hinduja, Michael Kaess
In this paper, we address the challenging problem of data association for underwater SLAM through a novel method for sonar image correspondence using learned features. We introduce SONIC (SONar Image Correspondence), a pose-supervised network designed to yield robust feature correspondence capable of withstanding viewpoint variations. The inherent complexity of the underwater environment stems from the dynamic and frequently limited visibility conditions, restricting vision to a few meters of often featureless expanses. This makes camera-based systems suboptimal in most open water application scenarios. Consequently, multibeam imaging sonars emerge as the preferred choice for perception sensors. However, they too are not without their limitations. While imaging sonars offer superior long-range visibility compared to cameras, their measurements can appear different from varying viewpoints. This inherent variability presents formidable challenges in data association, particularly for feature-based methods. Our method demonstrates significantly better performance in generating correspondences for sonar images which will pave the way for more accurate loop closure constraints and sonar-based place recognition. Code as well as simulated and real-world datasets will be made public to facilitate further development in the field.
Read more5/15/2024

0
Pose Estimation from Camera Images for Underwater Inspection
Luyuan Peng, Hari Vishnu, Mandar Chitre, Yuen Min Too, Bharath Kalyan, Rajat Mishra, Soo Pieng Tan
High-precision localization is pivotal in underwater reinspection missions. Traditional localization methods like inertial navigation systems, Doppler velocity loggers, and acoustic positioning face significant challenges and are not cost-effective for some applications. Visual localization is a cost-effective alternative in such cases, leveraging the cameras already equipped on inspection vehicles to estimate poses from images of the surrounding scene. Amongst these, machine learning-based pose estimation from images shows promise in underwater environments, performing efficient relocalization using models trained based on previously mapped scenes. We explore the efficacy of learning-based pose estimators in both clear and turbid water inspection missions, assessing the impact of image formats, model architectures and training data diversity. We innovate by employing novel view synthesis models to generate augmented training data, significantly enhancing pose estimation in unexplored regions. Moreover, we enhance localization accuracy by integrating pose estimator outputs with sensor data via an extended Kalman filter, demonstrating improved trajectory smoothness and accuracy.
Read more7/25/2024
🤿
0
A Sonar-based AUV Positioning System for Underwater Environments with Low Infrastructure Density
Emilio Olivastri, Daniel Fusaro, Wanmeng Li, Simone Mosco, Alberto Pretto
The increasing demand for underwater vehicles highlights the necessity for robust localization solutions in inspection missions. In this work, we present a novel real-time sonar-based underwater global positioning algorithm for AUVs (Autonomous Underwater Vehicles) designed for environments with a sparse distribution of human-made assets. Our approach exploits two synergistic data interpretation frontends applied to the same stream of sonar data acquired by a multibeam Forward-Looking Sonar (FSD). These observations are fused within a Particle Filter (PF) either to weigh more particles that belong to high-likelihood regions or to solve symmetric ambiguities. Preliminary experiments carried out on a simulated environment resembling a real underwater plant provided promising results. This work represents a starting point towards future developments of the method and consequent exhaustive evaluations also in real-world scenarios.
Read more5/6/2024
0
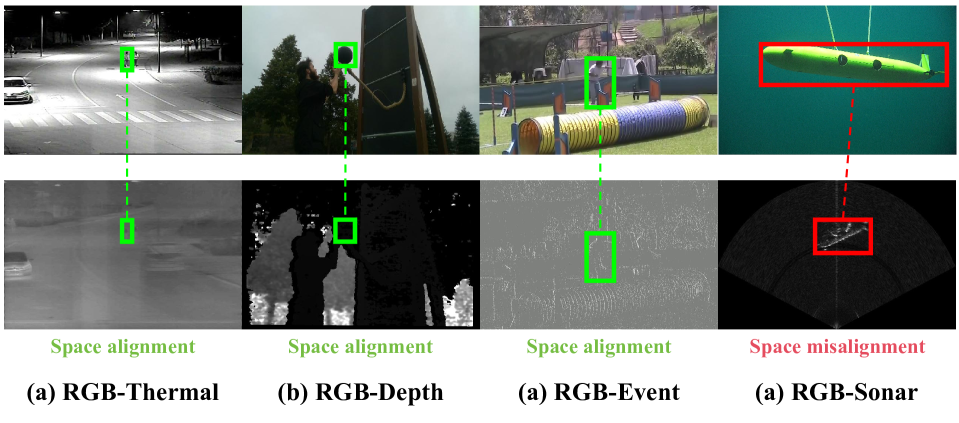
RGB-Sonar Tracking Benchmark and Spatial Cross-Attention Transformer Tracker
Yunfeng Li, Bo Wang, Jiuran Sun, Xueyi Wu, Ye Li
Vision camera and sonar are naturally complementary in the underwater environment. Combining the information from two modalities will promote better observation of underwater targets. However, this problem has not received sufficient attention in previous research. Therefore, this paper introduces a new challenging RGB-Sonar (RGB-S) tracking task and investigates how to achieve efficient tracking of an underwater target through the interaction of RGB and sonar modalities. Specifically, we first propose an RGBS50 benchmark dataset containing 50 sequences and more than 87000 high-quality annotated bounding boxes. Experimental results show that the RGBS50 benchmark poses a challenge to currently popular SOT trackers. Second, we propose an RGB-S tracker called SCANet, which includes a spatial cross-attention module (SCAM) consisting of a novel spatial cross-attention layer and two independent global integration modules. The spatial cross-attention is used to overcome the problem of spatial misalignment of between RGB and sonar images. Third, we propose a SOT data-based RGB-S simulation training method (SRST) to overcome the lack of RGB-S training datasets. It converts RGB images into sonar-like saliency images to construct pseudo-data pairs, enabling the model to learn the semantic structure of RGB-S-like data. Comprehensive experiments show that the proposed spatial cross-attention effectively achieves the interaction between RGB and sonar modalities and SCANet achieves state-of-the-art performance on the proposed benchmark. The code is available at https://github.com/LiYunfengLYF/RGBS50.
Read more6/27/2024