BEVPlace++: Fast, Robust, and Lightweight LiDAR Global Localization for Unmanned Ground Vehicles

0
Sign in to get full access
Overview
- This paper presents BEVPlace++, a fast, robust, and lightweight LiDAR global localization system for unmanned ground vehicles.
- It focuses on [Global Localization], [Place Recognition], [Loop Closing], and [3-DoF Pose Estimation] using LiDAR sensors.
- The system is designed to be computationally efficient and perform well in challenging environments.
Plain English Explanation
The research paper describes a new system called BEVPlace++ that helps self-driving vehicles and robots figure out where they are in the world using data from their laser scanners (LiDAR). This is an important capability for autonomous vehicles, as it allows them to navigate and avoid obstacles.
BEVPlace++ uses the LiDAR data to create a "bird's-eye view" map of the surroundings. It can then use this map to recognize places it has been before and estimate the vehicle's 3-dimensional position and orientation. This helps the vehicle figure out where it is, even if it has been there before or if the environment has changed.
The key advantages of BEVPlace++ are that it is fast, robust to changes in the environment, and computationally lightweight, making it suitable for use on small, resource-constrained vehicles.
Technical Explanation
BEVPlace++ is a LiDAR-based global localization system that operates in three main steps:
-
Bird's-Eye View (BEV) Representation: The system first converts the 3D LiDAR point cloud into a compact 2D "bird's-eye view" representation. This transformation preserves important spatial information while reducing the data size.
-
Place Recognition and Loop Closure: BEVPlace++ then uses this BEV representation to perform place recognition and loop closure detection. It can identify when the vehicle has returned to a previously visited location, even if the environment has changed.
-
3-DoF Pose Estimation: Finally, the system estimates the vehicle's 3-dimensional position and orientation (3 degrees of freedom) by aligning the current BEV representation with a reference map.
The key technical innovations include:
- Efficient BEV Encoding: A compact BEV representation that preserves spatial information while being computationally efficient.
- Robust Feature Matching: Robust feature matching algorithms that can handle changes in the environment.
- Lightweight Optimization: A fast pose estimation algorithm that can run in real-time on resource-constrained platforms.
Extensive experiments on public datasets demonstrate that BEVPlace++ outperforms state-of-the-art LiDAR localization methods in terms of speed, accuracy, and robustness.
Critical Analysis
The paper provides a thorough evaluation of BEVPlace++ and highlights its strengths, but also acknowledges some limitations:
- The system relies on the availability of a pre-built reference map, which may not always be available in practice.
- The pose estimation algorithm assumes a 3-DoF motion model, which may not be sufficient for more complex vehicle dynamics.
- The evaluation was conducted in relatively structured urban environments, and the performance in more unstructured or dynamic settings is not fully explored.
Further research could explore ways to address these limitations, such as incremental map building, support for 6-DoF pose estimation, and evaluation in more challenging real-world scenarios.
Conclusion
BEVPlace++ represents a significant advancement in LiDAR-based global localization for autonomous vehicles and robots. Its combination of speed, robustness, and computational efficiency make it a promising solution for real-world deployment, with potential applications in self-driving cars, delivery drones, and other unmanned ground vehicles. The insights and techniques presented in this paper could also inform the development of future localization systems for a wide range of robotic platforms.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
BEVPlace++: Fast, Robust, and Lightweight LiDAR Global Localization for Unmanned Ground Vehicles
Lun Luo, Si-Yuan Cao, Xiaorui Li, Jintao Xu, Rui Ai, Zhu Yu, Xieyuanli Chen
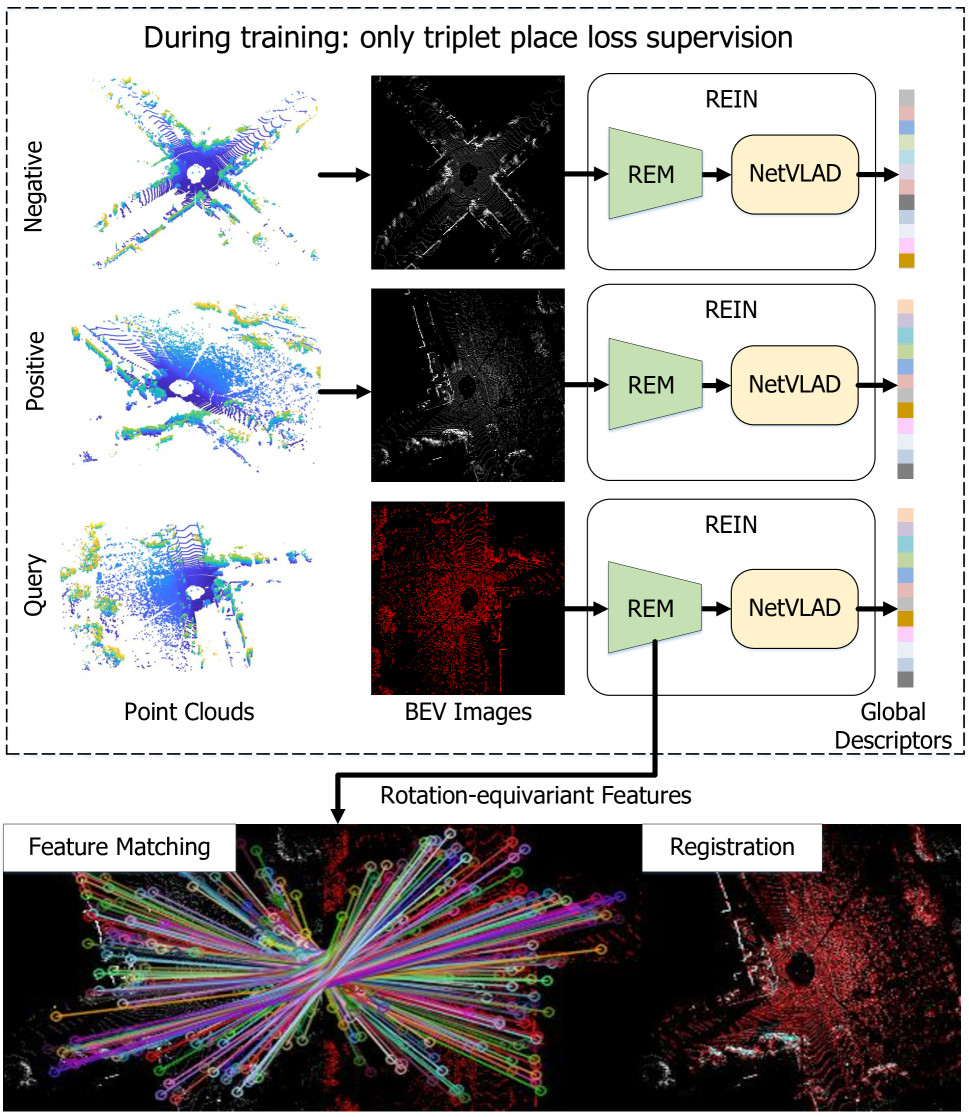
This article introduces BEVPlace++, a novel, fast, and robust LiDAR global localization method for unmanned ground vehicles. It uses lightweight convolutional neural networks (CNNs) on Bird's Eye View (BEV) image-like representations of LiDAR data to achieve accurate global localization through place recognition followed by 3-DoF pose estimation. Our detailed analyses reveal an interesting fact that CNNs are inherently effective at extracting distinctive features from LiDAR BEV images. Remarkably, keypoints of two BEV images with large translations can be effectively matched using CNN-extracted features. Building on this insight, we design a rotation equivariant module (REM) to obtain distinctive features while enhancing robustness to rotational changes. A Rotation Equivariant and Invariant Network (REIN) is then developed by cascading REM and a descriptor generator, NetVLAD, to sequentially generate rotation equivariant local features and rotation invariant global descriptors. The global descriptors are used first to achieve robust place recognition, and the local features are used for accurate pose estimation. Experimental results on multiple public datasets demonstrate that BEVPlace++, even when trained on a small dataset (3000 frames of KITTI) only with place labels, generalizes well to unseen environments, performs consistently across different days and years, and adapts to various types of LiDAR scanners. BEVPlace++ achieves state-of-the-art performance in subtasks of global localization including place recognition, loop closure detection, and global localization. Additionally, BEVPlace++ is lightweight, runs in real-time, and does not require accurate pose supervision, making it highly convenient for deployment. The source codes are publicly available at https://github.com/zjuluolun/BEVPlace.
Read more8/12/2024

0
GraphBEV: Towards Robust BEV Feature Alignment for Multi-Modal 3D Object Detection
Ziying Song, Lei Yang, Shaoqing Xu, Lin Liu, Dongyang Xu, Caiyan Jia, Feiyang Jia, Li Wang
Integrating LiDAR and camera information into Bird's-Eye-View (BEV) representation has emerged as a crucial aspect of 3D object detection in autonomous driving. However, existing methods are susceptible to the inaccurate calibration relationship between LiDAR and the camera sensor. Such inaccuracies result in errors in depth estimation for the camera branch, ultimately causing misalignment between LiDAR and camera BEV features. In this work, we propose a robust fusion framework called Graph BEV. Addressing errors caused by inaccurate point cloud projection, we introduce a Local Align module that employs neighbor-aware depth features via Graph matching. Additionally, we propose a Global Align module to rectify the misalignment between LiDAR and camera BEV features. Our Graph BEV framework achieves state-of-the-art performance, with an mAP of 70.1%, surpassing BEV Fusion by 1.6% on the nuscenes validation set. Importantly, our Graph BEV outperforms BEV Fusion by 8.3% under conditions with misalignment noise.
Read more4/11/2024

0
U-BEV: Height-aware Bird's-Eye-View Segmentation and Neural Map-based Relocalization
Andrea Boscolo Camiletto, Alfredo Bochicchio, Alexander Liniger, Dengxin Dai, Abel Gawel
Efficient relocalization is essential for intelligent vehicles when GPS reception is insufficient or sensor-based localization fails. Recent advances in Bird's-Eye-View (BEV) segmentation allow for accurate estimation of local scene appearance and in turn, can benefit the relocalization of the vehicle. However, one downside of BEV methods is the heavy computation required to leverage the geometric constraints. This paper presents U-BEV, a U-Net inspired architecture that extends the current state-of-the-art by allowing the BEV to reason about the scene on multiple height layers before flattening the BEV features. We show that this extension boosts the performance of the U-BEV by up to 4.11 IoU. Additionally, we combine the encoded neural BEV with a differentiable template matcher to perform relocalization on neural SD-map data. The model is fully end-to-end trainable and outperforms transformer-based BEV methods of similar computational complexity by 1.7 to 2.8 mIoU and BEV-based relocalization by over 26% Recall Accuracy on the nuScenes dataset.
Read more9/4/2024

0
Matched Filtering based LiDAR Place Recognition for Urban and Natural Environments
Therese Joseph, Tobias Fischer, Michael Milford
Place recognition is an important task within autonomous navigation, involving the re-identification of previously visited locations from an initial traverse. Unlike visual place recognition (VPR), LiDAR place recognition (LPR) is tolerant to changes in lighting, seasons, and textures, leading to high performance on benchmark datasets from structured urban environments. However, there is a growing need for methods that can operate in diverse environments with high performance and minimal training. In this paper, we propose a handcrafted matching strategy that performs roto-translation invariant place recognition and relative pose estimation for both urban and unstructured natural environments. Our approach constructs Birds Eye View (BEV) global descriptors and employs a two-stage search using matched filtering -- a signal processing technique for detecting known signals amidst noise. Extensive testing on the NCLT, Oxford Radar, and WildPlaces datasets consistently demonstrates state-of-the-art (SoTA) performance across place recognition and relative pose estimation metrics, with up to 15% higher recall than previous SoTA.
Read more9/9/2024