Matched Filtering based LiDAR Place Recognition for Urban and Natural Environments

0

Sign in to get full access
Overview
- This paper presents a matched filtering-based approach for LiDAR-based place recognition in urban and natural environments.
- The proposed method aims to efficiently match query LiDAR scans to a database of reference scans, enabling robust localization and mapping.
- The researchers evaluate their approach on various datasets, demonstrating its effectiveness compared to existing techniques.
Plain English Explanation
The paper discusses a method for helping robots and self-driving cars recognize and locate themselves in different environments using 3D laser scanning (LiDAR) data. This is an important capability for autonomous navigation and mapping.
The key idea is to use a "matched filtering" technique to efficiently compare a new LiDAR scan (from the robot's sensors) against a database of previously recorded scans. This allows the robot to determine where it is located by finding the best match in the database.
The researchers tested their approach on both urban and natural environments, and found it performed better than some existing place recognition methods. This is an important step towards more robust and reliable localization for robots and autonomous vehicles.
Technical Explanation
The paper presents a LiDAR-based place recognition system that uses matched filtering to efficiently compare query scans to a database of reference scans. Matched filtering is a signal processing technique that can be used to identify patterns in data.
The key components of the approach include:
- Preprocessing: The reference scans are preprocessed to extract a compact "signature" representation.
- Matching: The query scan is compared to the reference scan signatures using matched filtering to find the best match.
- Verification: The top matching candidates are further verified using additional geometric constraints.
The researchers evaluated their system on multiple urban and natural environment datasets, comparing it to state-of-the-art place recognition baselines. Their experiments showed the proposed approach outperformed these existing methods in terms of accuracy and efficiency.
Critical Analysis
The paper provides a thorough evaluation of the proposed LiDAR place recognition system, including experiments on diverse environments. However, some limitations and areas for future work are mentioned:
- The system relies on a pre-built database of reference scans, which may be challenging to acquire and maintain in real-world applications.
- The performance may degrade in dynamic environments with moving objects or significant changes over time.
- Further research is needed to improve the efficiency and scalability of the matching process for large-scale environments.
Overall, the matched filtering-based approach seems promising, but additional work is required to address these challenges and enable robust long-term deployment of the technology.
Conclusion
This paper introduces a LiDAR-based place recognition system that uses matched filtering to efficiently match query scans to a database of reference scans. The proposed method demonstrates strong performance on both urban and natural environment datasets, outperforming existing techniques.
While the system shows promise, there are still some practical limitations that need to be addressed. Overcoming these challenges could lead to significant advancements in autonomous navigation, mapping, and localization for robots and self-driving vehicles.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Matched Filtering based LiDAR Place Recognition for Urban and Natural Environments
Therese Joseph, Tobias Fischer, Michael Milford
Place recognition is an important task within autonomous navigation, involving the re-identification of previously visited locations from an initial traverse. Unlike visual place recognition (VPR), LiDAR place recognition (LPR) is tolerant to changes in lighting, seasons, and textures, leading to high performance on benchmark datasets from structured urban environments. However, there is a growing need for methods that can operate in diverse environments with high performance and minimal training. In this paper, we propose a handcrafted matching strategy that performs roto-translation invariant place recognition and relative pose estimation for both urban and unstructured natural environments. Our approach constructs Birds Eye View (BEV) global descriptors and employs a two-stage search using matched filtering -- a signal processing technique for detecting known signals amidst noise. Extensive testing on the NCLT, Oxford Radar, and WildPlaces datasets consistently demonstrates state-of-the-art (SoTA) performance across place recognition and relative pose estimation metrics, with up to 15% higher recall than previous SoTA.
Read more9/9/2024
0
Evaluation and Deployment of LiDAR-based Place Recognition in Dense Forests
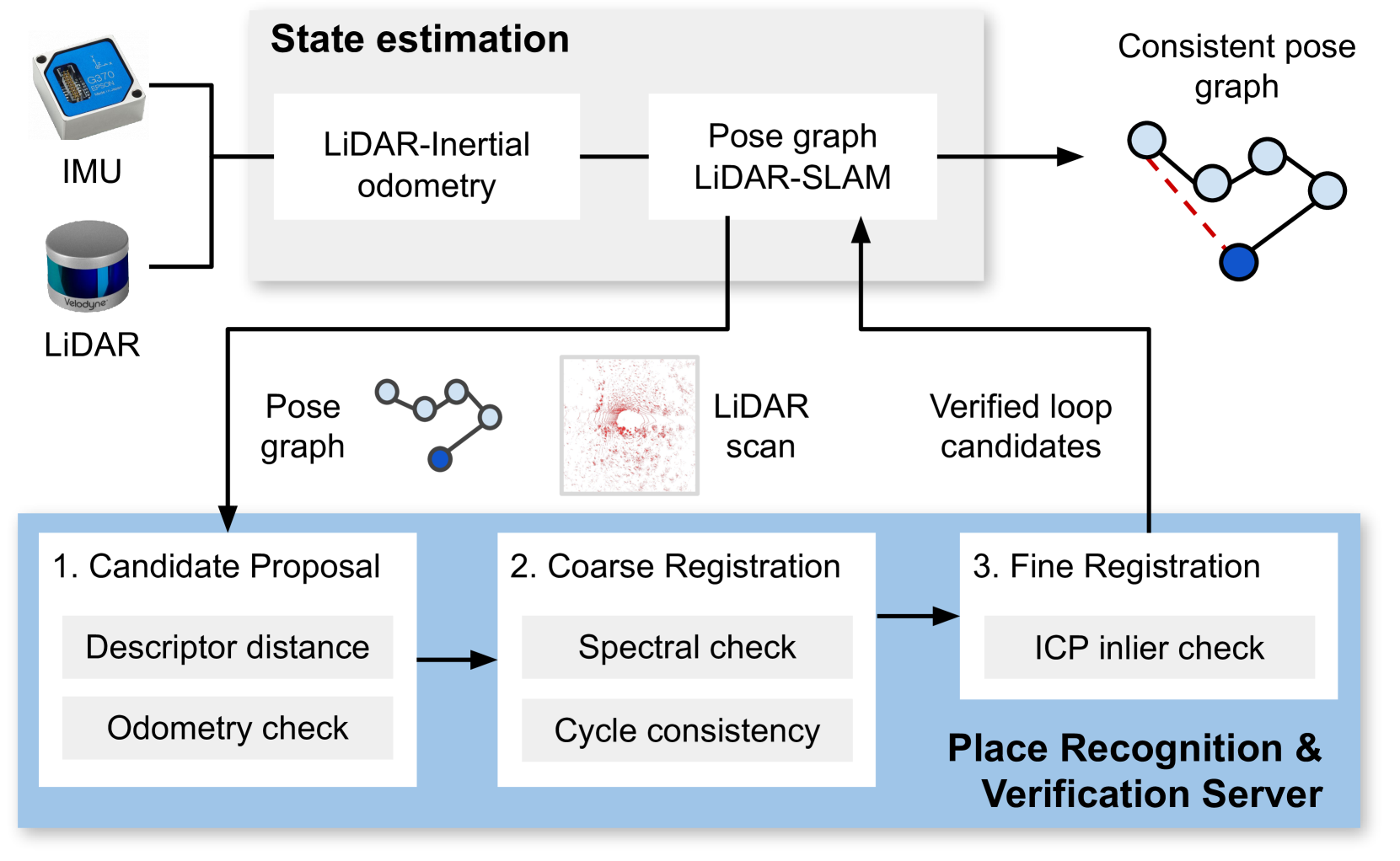
Haedam Oh, Nived Chebrolu, Matias Mattamala, Leonard Frei{ss}muth, Maurice Fallon
Many LiDAR place recognition systems have been developed and tested specifically for urban driving scenarios. Their performance in natural environments such as forests and woodlands have been studied less closely. In this paper, we analyzed the capabilities of four different LiDAR place recognition systems, both handcrafted and learning-based methods, using LiDAR data collected with a handheld device and legged robot within dense forest environments. In particular, we focused on evaluating localization where there is significant translational and orientation difference between corresponding LiDAR scan pairs. This is particularly important for forest survey systems where the sensor or robot does not follow a defined road or path. Extending our analysis we then incorporated the best performing approach, Logg3dNet, into a full 6-DoF pose estimation system -- introducing several verification layers for precise registration. We demonstrated the performance of our methods in three operational modes: online SLAM, offline multi-mission SLAM map merging, and relocalization into a prior map. We evaluated these modes using data captured in forests from three different countries, achieving 80% of correct loop closures candidates with baseline distances up to 5m, and 60% up to 10m. Video at: https://youtu.be/86l-oxjwmjY
Read more9/2/2024
👁️
0
General Place Recognition Survey: Towards Real-World Autonomy
Peng Yin, Jianhao Jiao, Shiqi Zhao, Lingyun Xu, Guoquan Huang, Howie Choset, Sebastian Scherer, Jianda Han
In the realm of robotics, the quest for achieving real-world autonomy, capable of executing large-scale and long-term operations, has positioned place recognition (PR) as a cornerstone technology. Despite the PR community's remarkable strides over the past two decades, garnering attention from fields like computer vision and robotics, the development of PR methods that sufficiently support real-world robotic systems remains a challenge. This paper aims to bridge this gap by highlighting the crucial role of PR within the framework of Simultaneous Localization and Mapping (SLAM) 2.0. This new phase in robotic navigation calls for scalable, adaptable, and efficient PR solutions by integrating advanced artificial intelligence (AI) technologies. For this goal, we provide a comprehensive review of the current state-of-the-art (SOTA) advancements in PR, alongside the remaining challenges, and underscore its broad applications in robotics. This paper begins with an exploration of PR's formulation and key research challenges. We extensively review literature, focusing on related methods on place representation and solutions to various PR challenges. Applications showcasing PR's potential in robotics, key PR datasets, and open-source libraries are discussed. We also emphasizes our open-source package, aimed at new development and benchmark for general PR. We conclude with a discussion on PR's future directions, accompanied by a summary of the literature covered and access to our open-source library, available to the robotics community at: https://github.com/MetaSLAM/GPRS.
Read more5/9/2024

0
Visual place recognition for aerial imagery: A survey
Ivan Moskalenko, Anastasiia Kornilova, Gonzalo Ferrer
Aerial imagery and its direct application to visual localization is an essential problem for many Robotics and Computer Vision tasks. While Global Navigation Satellite Systems (GNSS) are the standard default solution for solving the aerial localization problem, it is subject to a number of limitations, such as, signal instability or solution unreliability that make this option not so desirable. Consequently, visual geolocalization is emerging as a viable alternative. However, adapting Visual Place Recognition (VPR) task to aerial imagery presents significant challenges, including weather variations and repetitive patterns. Current VPR reviews largely neglect the specific context of aerial data. This paper introduces a methodology tailored for evaluating VPR techniques specifically in the domain of aerial imagery, providing a comprehensive assessment of various methods and their performance. However, we not only compare various VPR methods, but also demonstrate the importance of selecting appropriate zoom and overlap levels when constructing map tiles to achieve maximum efficiency of VPR algorithms in the case of aerial imagery. The code is available on our GitHub repository -- https://github.com/prime-slam/aero-vloc.
Read more6/4/2024