Beyond Closure Models: Learning Chaotic-Systems via Physics-Informed Neural Operators

0

Sign in to get full access
Overview
- This paper explores a new approach to modeling complex chaotic systems using physics-informed neural operators.
- Traditional closure models often struggle to accurately capture the dynamics of chaotic systems.
- The proposed method aims to learn the underlying physics directly from data, without relying on pre-defined closure models.
- The technique is demonstrated on a range of canonical chaotic systems, showing improved predictive performance compared to existing methods.
Plain English Explanation
The paper discusses a new way to model complex systems that behave chaotically, or in an unpredictable manner. Traditional methods, known as "closure models," often have difficulty accurately capturing the dynamics of these types of systems.
The researchers propose a novel approach that uses physics-informed neural operators to learn the underlying physics directly from data, without relying on pre-defined closure models. This means the model can discover the rules governing the system's behavior, rather than trying to fit it to a predefined set of equations.
The researchers test their technique on several well-known chaotic systems, and find that it outperforms existing methods in terms of predicting the system's future behavior. This suggests the new approach could be a valuable tool for modeling a wide range of complex, unpredictable phenomena in fields like fluid dynamics, climate modeling, and beyond.
Technical Explanation
The paper presents a new framework for modeling chaotic systems, which are known to be difficult to capture accurately using traditional "closure models." The key innovation is the use of physics-informed neural operators, which can learn the underlying governing equations directly from data, without relying on pre-defined closure assumptions.
The authors demonstrate their approach on a range of canonical chaotic systems, including the Lorenz system, the Kuramoto-Sivashinsky equation, and the two-dimensional Navier-Stokes equations. They show that the physics-informed neural operator models outperform traditional closure-based methods in terms of predicting the long-term dynamics of these systems.
The success of the approach is attributed to the neural operator's ability to learn the complex, nonlinear relationships between the system's variables without being constrained by predefined closure assumptions. This allows the model to better capture the intricate behavior of chaotic systems, which is often poorly represented by traditional closure models.
Critical Analysis
The paper presents a promising new direction for modeling chaotic systems, but it is important to note some potential limitations and areas for further research:
- The paper focuses on relatively low-dimensional chaotic systems, and it remains to be seen how the approach will scale to higher-dimensional, more complex systems encountered in real-world applications.
- The training of the neural operators can be computationally intensive, which may limit their practical applicability for some use cases.
- The authors do not extensively explore the interpretability of the learned neural operators, which could be an important consideration for certain applications where the underlying physics need to be understood.
Additionally, further research could investigate ways to incorporate additional physical constraints or prior knowledge into the neural operator framework, potentially improving its performance and robustness.
Conclusion
This paper presents a novel approach to modeling chaotic systems using physics-informed neural operators. By learning the underlying governing equations directly from data, without relying on predefined closure models, the proposed method demonstrates improved predictive performance on a range of canonical chaotic systems.
The work highlights the potential of data-driven, physics-informed machine learning techniques to advance the modeling of complex, unpredictable phenomena in fields like fluid dynamics, climate science, and beyond. As the approach matures and is applied to larger-scale problems, it could become a valuable tool for researchers and practitioners seeking to better understand and predict the behavior of chaotic systems.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Beyond Closure Models: Learning Chaotic-Systems via Physics-Informed Neural Operators
Chuwei Wang, Julius Berner, Zongyi Li, Di Zhou, Jiayun Wang, Jane Bae, Anima Anandkumar
Accurately predicting the long-term behavior of chaotic systems is crucial for various applications such as climate modeling. However, achieving such predictions typically requires iterative computations over a dense spatiotemporal grid to account for the unstable nature of chaotic systems, which is expensive and impractical in many real-world situations. An alternative approach to such a full-resolved simulation is using a coarse grid and then correcting its errors through a textit{closure model}, which approximates the overall information from fine scales not captured in the coarse-grid simulation. Recently, ML approaches have been used for closure modeling, but they typically require a large number of training samples from expensive fully-resolved simulations (FRS). In this work, we prove an even more fundamental limitation, i.e., the standard approach to learning closure models suffers from a large approximation error for generic problems, no matter how large the model is, and it stems from the non-uniqueness of the mapping. We propose an alternative end-to-end learning approach using a physics-informed neural operator (PINO) that overcomes this limitation by not using a closure model or a coarse-grid solver. We first train the PINO model on data from a coarse-grid solver and then fine-tune it with (a small amount of) FRS and physics-based losses on a fine grid. The discretization-free nature of neural operators means that they do not suffer from the restriction of a coarse grid that closure models face, and they can provably approximate the long-term statistics of chaotic systems. In our experiments, our PINO model achieves a 120x speedup compared to FRS with a relative error $sim 5%$. In contrast, the closure model coupled with a coarse-grid solver is $58$x slower than PINO while having a much higher error $sim205%$ when the closure model is trained on the same FRS dataset.
Read more8/12/2024
0
Data-Driven Stochastic Closure Modeling via Conditional Diffusion Model and Neural Operator
Xinghao Dong, Chuanqi Chen, Jin-Long Wu
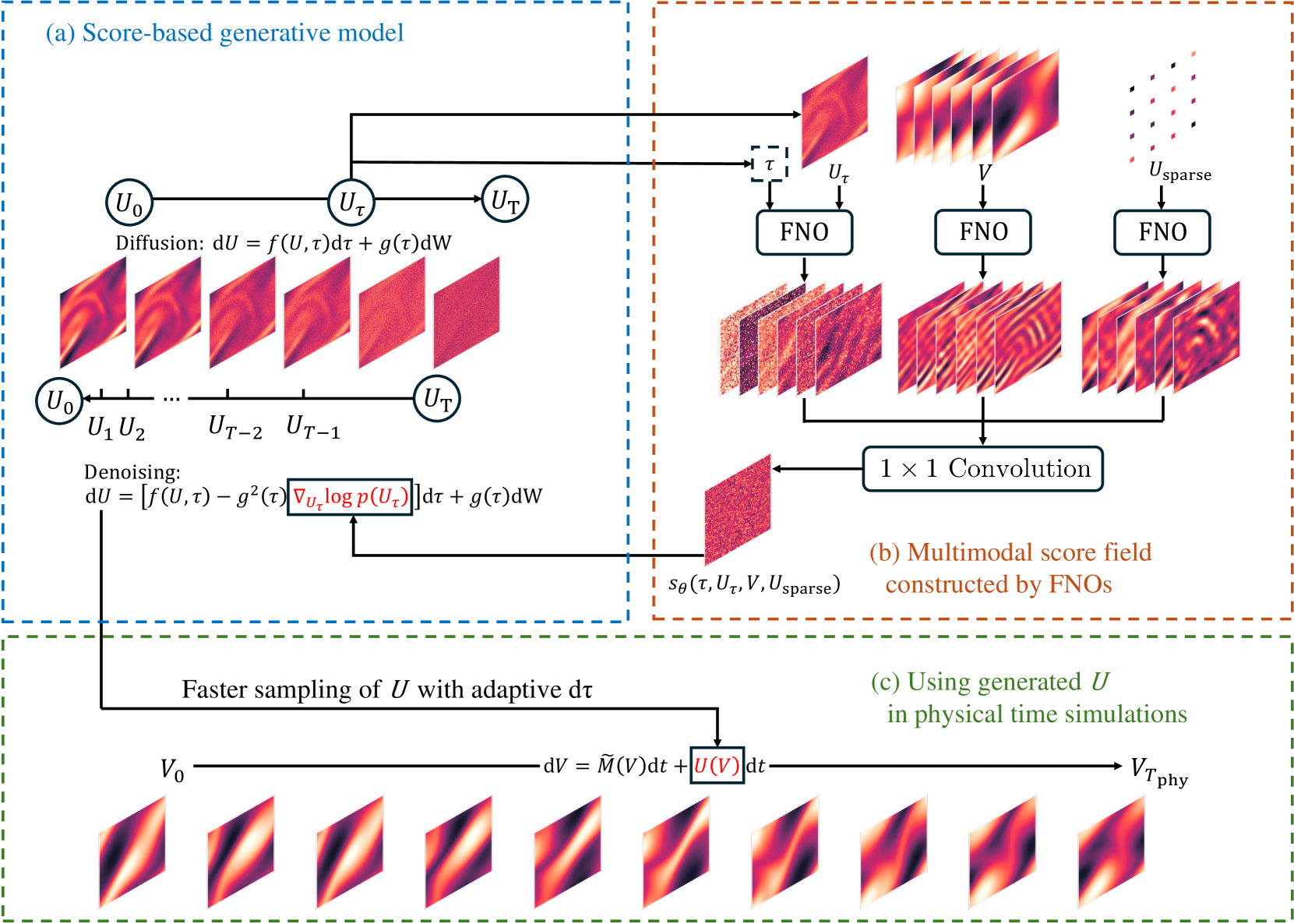
Closure models are widely used in simulating complex multiscale dynamical systems such as turbulence and the earth system, for which direct numerical simulation that resolves all scales is often too expensive. For those systems without a clear scale separation, deterministic and local closure models often lack enough generalization capability, which limits their performance in many real-world applications. In this work, we propose a data-driven modeling framework for constructing stochastic and non-local closure models via conditional diffusion model and neural operator. Specifically, the Fourier neural operator is incorporated into a score-based diffusion model, which serves as a data-driven stochastic closure model for complex dynamical systems governed by partial differential equations (PDEs). We also demonstrate how accelerated sampling methods can improve the efficiency of the data-driven stochastic closure model. The results show that the proposed methodology provides a systematic approach via generative machine learning techniques to construct data-driven stochastic closure models for multiscale dynamical systems with continuous spatiotemporal fields.
Read more8/7/2024

0
Closure Discovery for Coarse-Grained Partial Differential Equations Using Grid-based Reinforcement Learning
Jan-Philipp von Bassewitz, Sebastian Kaltenbach, Petros Koumoutsakos
Reliable predictions of critical phenomena, such as weather, wildfires and epidemics often rely on models described by Partial Differential Equations (PDEs). However, simulations that capture the full range of spatio-temporal scales described by such PDEs are often prohibitively expensive. Consequently, coarse-grained simulations are usually deployed that adopt various heuristics and empirical closure terms to account for the missing information. We propose a novel and systematic approach for identifying closures in under-resolved PDEs using grid-based Reinforcement Learning. This formulation incorporates inductive bias and exploits locality by deploying a central policy represented efficiently by a Fully Convolutional Network (FCN). We demonstrate the capabilities and limitations of our framework through numerical solutions of the advection equation and the Burgers' equation. Our results show accurate predictions for in- and out-of-distribution test cases as well as a significant speedup compared to resolving all scales.
Read more5/24/2024
0
Domain-decoupled Physics-informed Neural Networks with Closed-form Gradients for Fast Model Learning of Dynamical Systems
Henrik Krauss, Tim-Lukas Habich, Max Bartholdt, Thomas Seel, Moritz Schappler
Physics-informed neural networks (PINNs) are trained using physical equations and can also incorporate unmodeled effects by learning from data. PINNs for control (PINCs) of dynamical systems are gaining interest due to their prediction speed compared to classical numerical integration methods for nonlinear state-space models, making them suitable for real-time control applications. We introduce the domain-decoupled physics-informed neural network (DD-PINN) to address current limitations of PINC in handling large and complex nonlinear dynamical systems. The time domain is decoupled from the feed-forward neural network to construct an Ansatz function, allowing for calculation of gradients in closed form. This approach significantly reduces training times, especially for large dynamical systems, compared to PINC, which relies on graph-based automatic differentiation. Additionally, the DD-PINN inherently fulfills the initial condition and supports higher-order excitation inputs, simplifying the training process and enabling improved prediction accuracy. Validation on three systems - a nonlinear mass-spring-damper, a five-mass-chain, and a two-link robot - demonstrates that the DD-PINN achieves significantly shorter training times. In cases where the PINC's prediction diverges, the DD-PINN's prediction remains stable and accurate due to higher physics loss reduction or use of a higher-order excitation input. The DD-PINN allows for fast and accurate learning of large dynamical systems previously out of reach for the PINC.
Read more8/29/2024