A Biologically Inspired Design Principle for Building Robust Robotic Systems

0

Sign in to get full access
Overview
- Presents a biologically inspired design principle for building robust robotic systems
- Draws inspiration from how biological systems maintain stability and adapt to changing environments
- Proposes a general framework for designing resilient robotic systems that can withstand uncertainties and disturbances
Plain English Explanation
The paper proposes a design approach for building robust and adaptable robotic systems, inspired by how living organisms maintain stability and respond to changes in their environment. Biological systems have a remarkable ability to withstand disturbances and adapt to new circumstances, and the researchers suggest that we can apply similar principles to the design of robots.
The key idea is to incorporate [object Object] and [object Object] that allow the robot to continuously monitor its own state and make adjustments to maintain stability, much like the nervous and musculoskeletal systems in animals. This allows the robot to adapt to uncertainties and disturbances, rather than relying on precise pre-programmed responses.
The researchers also emphasize the importance of [object Object], where the physical structure of the robot is closely integrated with its control system and sensory capabilities. This can create [object Object] that are more robust and adaptable than traditional robot designs.
Technical Explanation
The paper presents a general framework for designing robust and resilient robotic systems, drawing inspiration from how biological systems maintain stability and adapt to changing environments. The authors propose a biologically inspired design principle that incorporates the following key elements:
-
Distributed control architecture: Rather than relying on a centralized control system, the robot's functionality is distributed across multiple interconnected components, similar to how the nervous system and musculoskeletal system work together in biological organisms.
-
Continuous self-monitoring and adaptation: The robot is equipped with internal feedback loops that allow it to continuously monitor its own state and make adjustments to maintain stability, similar to how animals use proprioceptive feedback to control their movements.
-
Embodied design: The physical structure of the robot is closely integrated with its control system and sensory capabilities, creating a "biomimetic" system that can better adapt to uncertainties and disturbances, as seen in [object Object].
The authors demonstrate the effectiveness of this approach through simulations and experiments with different robotic platforms, including [object Object] and [object Object]. The results show that these biologically inspired robotic systems can maintain stability and adapt to a wide range of disturbances, outperforming traditional robot designs.
Critical Analysis
The paper presents a compelling and well-reasoned approach to designing robust and adaptive robotic systems, drawing on insights from biological systems. The authors acknowledge that while the proposed principles have been demonstrated in simulations and experiments, further research is needed to fully understand the implications and potential limitations of this approach.
One potential area for further exploration is the scalability and generalization of the biologically inspired design principles. The authors have focused on specific robotic platforms, and it would be valuable to investigate how these principles can be applied to a broader range of robotic systems, including those with different morphologies and functionalities.
Additionally, the paper does not delve deeply into the computational and algorithmic challenges associated with implementing the proposed control architectures and feedback loops. Exploring the trade-offs between complexity, performance, and energy efficiency would be a valuable direction for future research.
Overall, the paper presents a promising and thought-provoking approach to building robust and adaptable robotic systems, and the authors have laid the groundwork for further exploration and development in this area.
Conclusion
The paper introduces a biologically inspired design principle for building robust and resilient robotic systems. By drawing inspiration from how biological organisms maintain stability and adapt to changing environments, the authors propose a general framework that incorporates distributed control architectures, continuous self-monitoring and adaptation, and embodied design.
The key insight is that by emulating the principles underlying the remarkable adaptability of living systems, we can create robotic systems that are better equipped to withstand uncertainties and disturbances, opening up new possibilities for their deployment in complex and unpredictable environments. While further research is needed to fully realize the potential of this approach, the paper provides a valuable contribution to the field of resilient and adaptive robotics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Biologically Inspired Design Principle for Building Robust Robotic Systems
Xing Li, Oussama Zenkri, Adrian Pfisterer, Oliver Brock
Robustness, the ability of a system to maintain performance under significant and unanticipated environmental changes, is a critical property for robotic systems. While biological systems naturally exhibit robustness, there is no comprehensive understanding of how to achieve similar robustness in robotic systems. In this work, we draw inspirations from biological systems and propose a design principle that advocates active interconnections among system components to enhance robustness to environmental variations. We evaluate this design principle in a challenging long-horizon manipulation task: solving lockboxes. Our extensive simulated and real-world experiments demonstrate that we could enhance robustness against environmental changes by establishing active interconnections among system components without substantial changes in individual components. Our findings suggest that a systematic investigation of design principles in system building is necessary. It also advocates for interdisciplinary collaborations to explore and evaluate additional principles of biological robustness to advance the development of intelligent and adaptable robotic systems.
Read more8/20/2024

0
Adaptive Stiffness: A Biomimetic Robotic System with Tensegrity-Based Compliant Mechanism
Po-Yu Hsieh, June-Hao Hou
Biomimicry has played a pivotal role in robotics. In contrast to rigid robots, bio-inspired robots exhibit an inherent compliance, facilitating versatile movements and operations in constrained spaces. The robot implementation in fabrication, however, has posed technical challenges and mechanical complexity, thereby underscoring a noticeable gap between research and practice. To address the limitation, the research draws inspiration from the unique musculoskeletal feature of vertebrate physiology, which displays significant capabilities for sophisticated locomotion. The research converts the biological paradigm into a tensegrity-based robotic system, which is formed by the design of rigid-flex coupling and a compliant mechanism. This integrated technique enables the robot to achieve a wide range of motions with variable stiffness and adaptability, holding great potential for advanced performance in ill-defined environments. In summation, the research aims to provide a robust foundation for tensegrity-based biomimetic robots in practice, enhancing the feasibility of undertaking intricate robotic constructions.
Read more7/9/2024
0
Modular, Resilient, and Scalable System Design Approaches -- Lessons learned in the years after DARPA Subterranean Challenge
Prasanna Sriganesh, James Maier, Adam Johnson, Burhanuddin Shirose, Rohan Chandrasekar, Charles Noren, Joshua Spisak, Ryan Darnley, Bhaskar Vundurthy, Matthew Travers
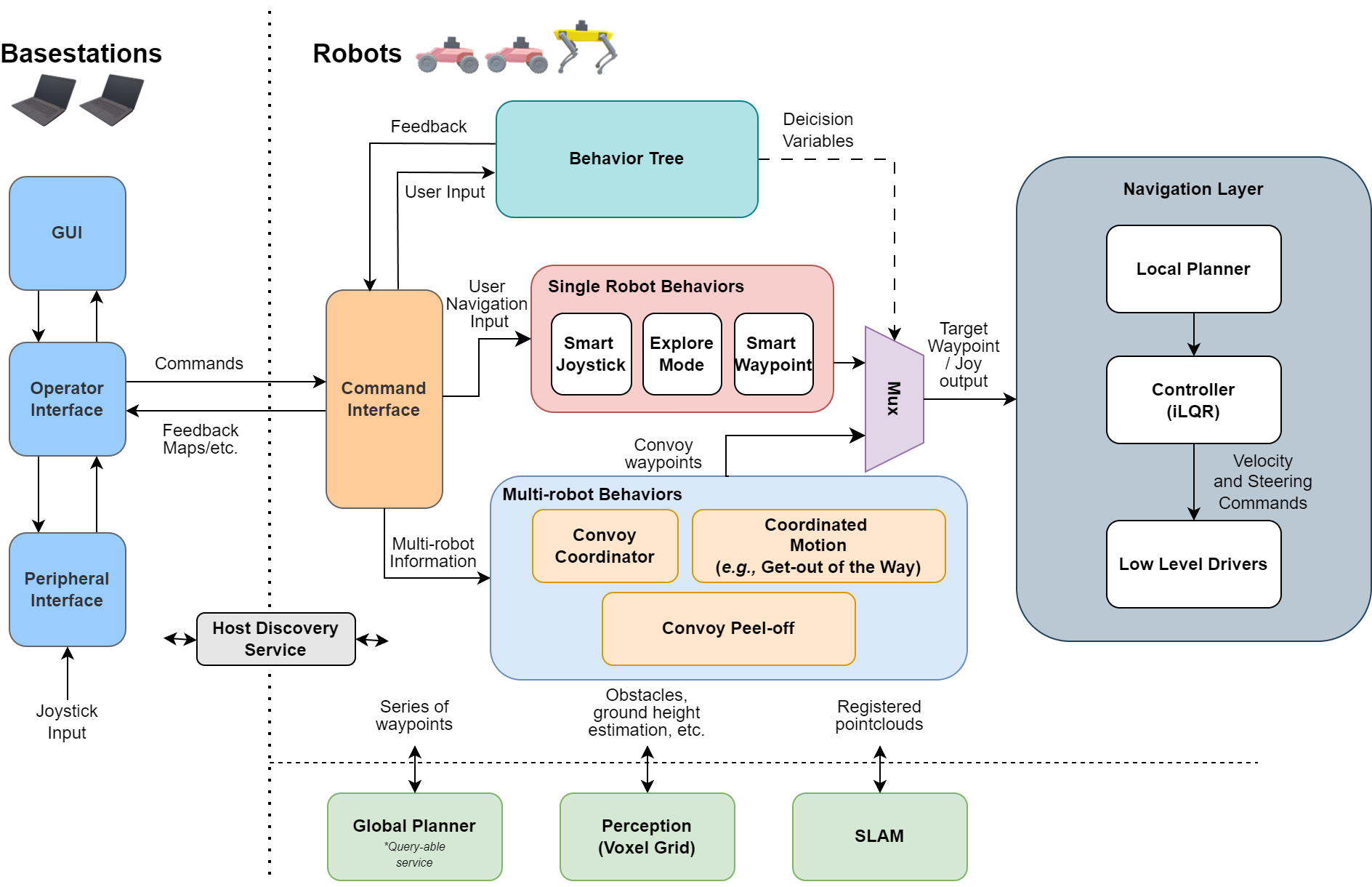
Field robotics applications, such as search and rescue, involve robots operating in large, unknown areas. These environments present unique challenges that compound the difficulties faced by a robot operator. The use of multi-robot teams, assisted by carefully designed autonomy, help reduce operator workload and allow the operator to effectively coordinate robot capabilities. In this work, we present a system architecture designed to optimize both robot autonomy and the operator experience in multi-robot scenarios. Drawing on lessons learned from our team's participation in the DARPA SubT Challenge, our architecture emphasizes modularity and interoperability. We empower the operator by allowing for adjustable levels of autonomy (sliding mode autonomy). We enhance the operator experience by using intuitive, adaptive interfaces that suggest context-aware actions to simplify control. Finally, we describe how the proposed architecture enables streamlined development of new capabilities for effective deployment of robot autonomy in the field.
Read more4/30/2024
0
An Internal Model Principle For Robots
Vadim K. Weinstein, Tamara Alshammari, Kalle G. Timperi, Mehdi Bennis, Steven M. LaValle
When designing a robot's internal system, one often makes assumptions about the structure of the intended environment of the robot. One may even assign meaning to various internal components of the robot in terms of expected environmental correlates. In this paper we want to make the distinction between robot's internal and external worlds clear-cut. Can the robot learn about its environment, relying only on internally available information, including the sensor data? Are there mathematical conditions on the internal robot system which can be internally verified and make the robot's internal system mirror the structure of the environment? We prove that sufficiency is such a mathematical principle, and mathematically describe the emergence of the robot's internal structure isomorphic or bisimulation equivalent to that of the environment. A connection to the free-energy principle is established, when sufficiency is interpreted as a limit case of surprise minimization. As such, we show that surprise minimization leads to having an internal model isomorphic to the environment. This also parallels the Good Regulator Principle which states that controlling a system sufficiently well means having a model of it. Unlike the mentioned theories, ours is discrete, and non-probabilistic.
Read more6/18/2024