Bridging the Gap between Human Motion and Action Semantics via Kinematic Phrases

0

Sign in to get full access
Overview
- This paper proposes a new approach called "Kinematic Phrases" to bridge the gap between human motion and action semantics.
- The method uses a pre-defined set of kinematic phrases that capture common motion patterns and their semantic associations.
- By mapping human motion to these kinematic phrases, the approach can translate motion into action-level semantics.
Plain English Explanation
When we observe people moving, we can often recognize the actions they are performing, like walking, waving, or throwing. This paper presents a new way to connect the physical motion of the human body to the higher-level meaning or semantics of those actions.
The key idea is to use a pre-defined set of common motion patterns, called "kinematic phrases." These kinematic phrases capture typical ways that people move, like reaching, grasping, or stepping. By mapping the observed motion of a person to these pre-defined kinematic phrases, the system can then translate that raw motion into a semantic understanding of the action being performed.
For example, if the system observes a reaching motion followed by a grasping motion, it can infer that the person is picking up an object. This semantic understanding of the action allows the system to go beyond just recognizing the raw motion and connect it to the actual meaning or purpose behind the movement.
Technical Explanation
The paper introduces the concept of "Kinematic Phrases" as a way to bridge the gap between low-level human motion and high-level action semantics. Kinematic phrases are a pre-defined set of motion patterns that capture common ways that people move their bodies, such as reaching, grasping, stepping, or waving.
The system works by first detecting and tracking the motion of a person's body using standard motion capture techniques. It then maps this observed motion onto the pre-defined set of kinematic phrases. For example, a reaching motion followed by a grasping motion would be mapped to the "pick up" kinematic phrase.
By translating the raw motion data into these semantic kinematic phrases, the system can then reason about the higher-level meaning and purpose of the observed actions. This allows the system to go beyond just recognizing the physical motion and understand the actual intent and context of the person's movements.
The authors evaluate their approach on several human activity recognition benchmarks and show that it outperforms baseline methods that do not leverage the semantic kinematic phrase representation.
Critical Analysis
The kinematic phrase approach presented in this paper is a promising step towards bridging the gap between low-level human motion and high-level action semantics. By providing an intermediate representation that captures common motion patterns and their associated meanings, the system can translate raw motion into a more interpretable and semantically-grounded form.
One potential limitation of the approach is the reliance on a pre-defined set of kinematic phrases. While the authors demonstrate that this set is sufficient to cover a wide range of common actions, it may not be able to handle more complex, nuanced, or novel movements. Expanding the kinematic phrase vocabulary or developing more flexible ways to compose and combine phrases could help address this limitation.
Additionally, the paper focuses primarily on mapping motion to action semantics, but does not deeply explore how this semantic understanding could be leveraged for other applications, such as text-guided 3D human motion generation or motion-driven language generation. Investigating these downstream use cases could further demonstrate the value of the kinematic phrase representation.
Overall, this work represents an important step towards bridging the gap between human motion and action semantics, and the authors' approach of using pre-defined kinematic phrases is a creative and promising direction for future research in this area.
Conclusion
This paper presents a novel approach called "Kinematic Phrases" that aims to connect the low-level motion of the human body to the higher-level semantics of the actions being performed. By mapping observed motion to a pre-defined set of common motion patterns and their associated meanings, the system can translate raw motion data into a more interpretable, semantically-grounded representation.
The key idea of using kinematic phrases as an intermediate representation is a clever way to bridge the gap between the physical and the conceptual. This approach has the potential to enable a wide range of applications, from motion-driven language generation to 3D human motion synthesis from text. While the current implementation has some limitations, the general concept represents an important advance in connecting human motion and action semantics.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Bridging the Gap between Human Motion and Action Semantics via Kinematic Phrases
Xinpeng Liu, Yong-Lu Li, Ailing Zeng, Zizheng Zhou, Yang You, Cewu Lu
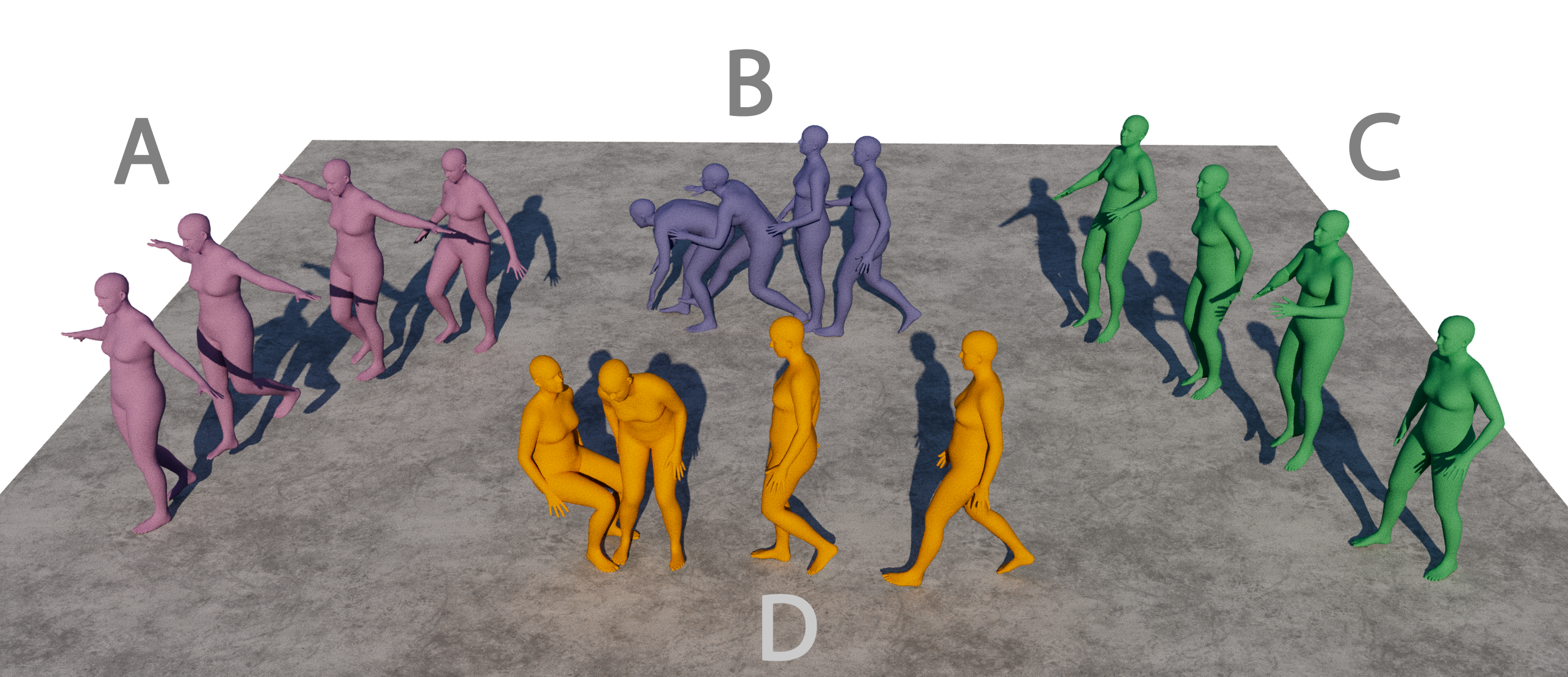
Motion understanding aims to establish a reliable mapping between motion and action semantics, while it is a challenging many-to-many problem. An abstract action semantic (i.e., walk forwards) could be conveyed by perceptually diverse motions (walking with arms up or swinging). In contrast, a motion could carry different semantics w.r.t. its context and intention. This makes an elegant mapping between them difficult. Previous attempts adopted direct-mapping paradigms with limited reliability. Also, current automatic metrics fail to provide reliable assessments of the consistency between motions and action semantics. We identify the source of these problems as the significant gap between the two modalities. To alleviate this gap, we propose Kinematic Phrases (KP) that take the objective kinematic facts of human motion with proper abstraction, interpretability, and generality. Based on KP, we can unify a motion knowledge base and build a motion understanding system. Meanwhile, KP can be automatically converted from motions to text descriptions with no subjective bias, inspiring Kinematic Prompt Generation (KPG) as a novel white-box motion generation benchmark. In extensive experiments, our approach shows superiority over other methods. Our project is available at https://foruck.github.io/KP/.
Read more7/15/2024
👁️
0
Fine-grained Knowledge Graph-driven Video-Language Learning for Action Recognition
Rui Zhang, Yafen Lu, Pengli Ji, Junxiao Xue, Xiaoran Yan
Recent work has explored video action recognition as a video-text matching problem and several effective methods have been proposed based on large-scale pre-trained vision-language models. However, these approaches primarily operate at a coarse-grained level without the detailed and semantic understanding of action concepts by exploiting fine-grained semantic connections between actions and body movements. To address this gap, we propose a contrastive video-language learning framework guided by a knowledge graph, termed KG-CLIP, which incorporates structured information into the CLIP model in the video domain. Specifically, we construct a multi-modal knowledge graph composed of multi-grained concepts by parsing actions based on compositional learning. By implementing a triplet encoder and deviation compensation to adaptively optimize the margin in the entity distance function, our model aims to improve alignment of entities in the knowledge graph to better suit complex relationship learning. This allows for enhanced video action recognition capabilities by accommodating nuanced associations between graph components. We comprehensively evaluate KG-CLIP on Kinetics-TPS, a large-scale action parsing dataset, demonstrating its effectiveness compared to competitive baselines. Especially, our method excels at action recognition with few sample frames or limited training data, which exhibits excellent data utilization and learning capabilities.
Read more7/22/2024

0
Semantics-aware Motion Retargeting with Vision-Language Models
Haodong Zhang, ZhiKe Chen, Haocheng Xu, Lei Hao, Xiaofei Wu, Songcen Xu, Zhensong Zhang, Yue Wang, Rong Xiong
Capturing and preserving motion semantics is essential to motion retargeting between animation characters. However, most of the previous works neglect the semantic information or rely on human-designed joint-level representations. Here, we present a novel Semantics-aware Motion reTargeting (SMT) method with the advantage of vision-language models to extract and maintain meaningful motion semantics. We utilize a differentiable module to render 3D motions. Then the high-level motion semantics are incorporated into the motion retargeting process by feeding the vision-language model with the rendered images and aligning the extracted semantic embeddings. To ensure the preservation of fine-grained motion details and high-level semantics, we adopt a two-stage pipeline consisting of skeleton-aware pre-training and fine-tuning with semantics and geometry constraints. Experimental results show the effectiveness of the proposed method in producing high-quality motion retargeting results while accurately preserving motion semantics.
Read more4/16/2024
0
Text-guided 3D Human Motion Generation with Keyframe-based Parallel Skip Transformer
Zichen Geng, Caren Han, Zeeshan Hayder, Jian Liu, Mubarak Shah, Ajmal Mian
Text-driven human motion generation is an emerging task in animation and humanoid robot design. Existing algorithms directly generate the full sequence which is computationally expensive and prone to errors as it does not pay special attention to key poses, a process that has been the cornerstone of animation for decades. We propose KeyMotion, that generates plausible human motion sequences corresponding to input text by first generating keyframes followed by in-filling. We use a Variational Autoencoder (VAE) with Kullback-Leibler regularization to project the keyframes into a latent space to reduce dimensionality and further accelerate the subsequent diffusion process. For the reverse diffusion, we propose a novel Parallel Skip Transformer that performs cross-modal attention between the keyframe latents and text condition. To complete the motion sequence, we propose a text-guided Transformer designed to perform motion-in-filling, ensuring the preservation of both fidelity and adherence to the physical constraints of human motion. Experiments show that our method achieves state-of-theart results on the HumanML3D dataset outperforming others on all R-precision metrics and MultiModal Distance. KeyMotion also achieves competitive performance on the KIT dataset, achieving the best results on Top3 R-precision, FID, and Diversity metrics.
Read more5/27/2024