Camera Relocalization in Shadow-free Neural Radiance Fields
2405.14824
0
0
🧠
Abstract
Camera relocalization is a crucial problem in computer vision and robotics. Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images. Several works have utilized NeRFs for refining camera poses, but they do not account for lighting changes that can affect scene appearance and shadow regions, causing a degraded pose optimization process. In this paper, we propose a two-staged pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization. We implement our scene representation upon a hash-encoded NeRF which significantly boosts up the pose optimization process. To account for the noisy image gradient computing problem in grid-based NeRFs, we further propose a re-devised truncated dynamic low-pass filter (TDLF) and a numerical gradient averaging technique to smoothen the process. Experimental results on several datasets with varying lighting conditions demonstrate that our method achieves state-of-the-art results in camera relocalization under varying lighting conditions. Code and data will be made publicly available.
Create account to get full access
Overview
- Camera relocalization is a crucial problem in computer vision and robotics
- Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images
- Several works have utilized NeRFs for refining camera poses, but they do not account for lighting changes that can affect scene appearance and shadow regions, causing a degraded pose optimization process
- This paper proposes a two-staged pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization
- The scene representation is implemented upon a hash-encoded NeRF to boost the pose optimization process
- Techniques are proposed to address noisy image gradient computing problems in grid-based NeRFs
Plain English Explanation
Camera relocalization is the process of determining the position and orientation of a camera in a given environment. This is a crucial problem in computer vision and robotics, as it allows systems to understand their surroundings and navigate effectively.
Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images. NeRFs are a type of 3D scene representation that can be used to generate images from different viewpoints. Several studies have used NeRFs to refine camera poses, but these methods don't account for changes in lighting conditions, which can affect the appearance of the scene and the shadows it casts. This can degrade the camera pose optimization process.
The researchers in this paper propose a two-stage pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization. They implement their scene representation using a hash-encoded NeRF, which significantly boosts the pose optimization process. To address the issue of noisy image gradients in grid-based NeRFs, they also propose a re-devised truncated dynamic low-pass filter (TDLF) and a numerical gradient averaging technique to smooth out the process.
Technical Explanation
The paper presents a novel approach to camera relocalization that addresses the challenge of varying lighting conditions. The proposed pipeline consists of two stages:
-
Image Normalization: The first stage normalizes the input images to account for changes in lighting and shadow conditions. This helps to ensure that the scene appearance is consistent across different viewpoints, improving the accuracy of the camera pose optimization process.
-
Hash-encoded NeRF: The second stage uses a hash-encoded NeRF as the scene representation. This hash-encoded NeRF significantly boosts the pose optimization process compared to traditional grid-based NeRFs.
To address the issue of noisy image gradients in grid-based NeRFs, the researchers propose two key techniques:
-
Re-devised Truncated Dynamic Low-Pass Filter (TDLF): This filter is used to smooth the image gradients, mitigating the impact of noise and improving the overall pose optimization process.
-
Numerical Gradient Averaging: The researchers also introduce a numerical gradient averaging technique to further smooth the gradients and provide more stable optimization.
The paper evaluates the proposed method on several datasets with varying lighting conditions and demonstrates that it achieves state-of-the-art results in camera relocalization under these challenging conditions.
Critical Analysis
The paper presents a well-designed and comprehensive solution to the problem of camera relocalization under varying lighting conditions. The researchers have thoughtfully addressed the key challenges, including the impact of lighting changes on scene appearance and the issue of noisy image gradients in grid-based NeRFs.
One potential limitation of the approach is that it may not be as effective in scenarios with extreme or rapidly changing lighting conditions, as the image normalization step may not be able to fully compensate for these dramatic changes. Additionally, the performance of the hash-encoded NeRF and the gradient smoothing techniques may be sensitive to the specific dataset and scene characteristics.
Further research could explore the integration of lidar data or other sensor modalities to provide additional cues for camera relocalization, potentially improving the robustness of the system in challenging lighting conditions. Additionally, investigating the use of neural networks for pose estimation could be a promising direction for further advancements in this field.
Conclusion
This paper presents a innovative approach to camera relocalization that addresses the challenge of varying lighting conditions. By normalizing images and utilizing a hash-encoded NeRF as the scene representation, the researchers have developed a robust and effective solution to this crucial problem in computer vision and robotics. The proposed techniques for smoothing image gradients are particularly noteworthy and could have broader applications in the field of 3D scene understanding and reconstruction. Overall, this research represents a significant step forward in the quest for reliable and accurate camera relocalization systems that can operate in a wide range of real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
VRS-NeRF: Visual Relocalization with Sparse Neural Radiance Field
Fei Xue, Ignas Budvytis, Daniel Olmeda Reino, Roberto Cipolla
0
0
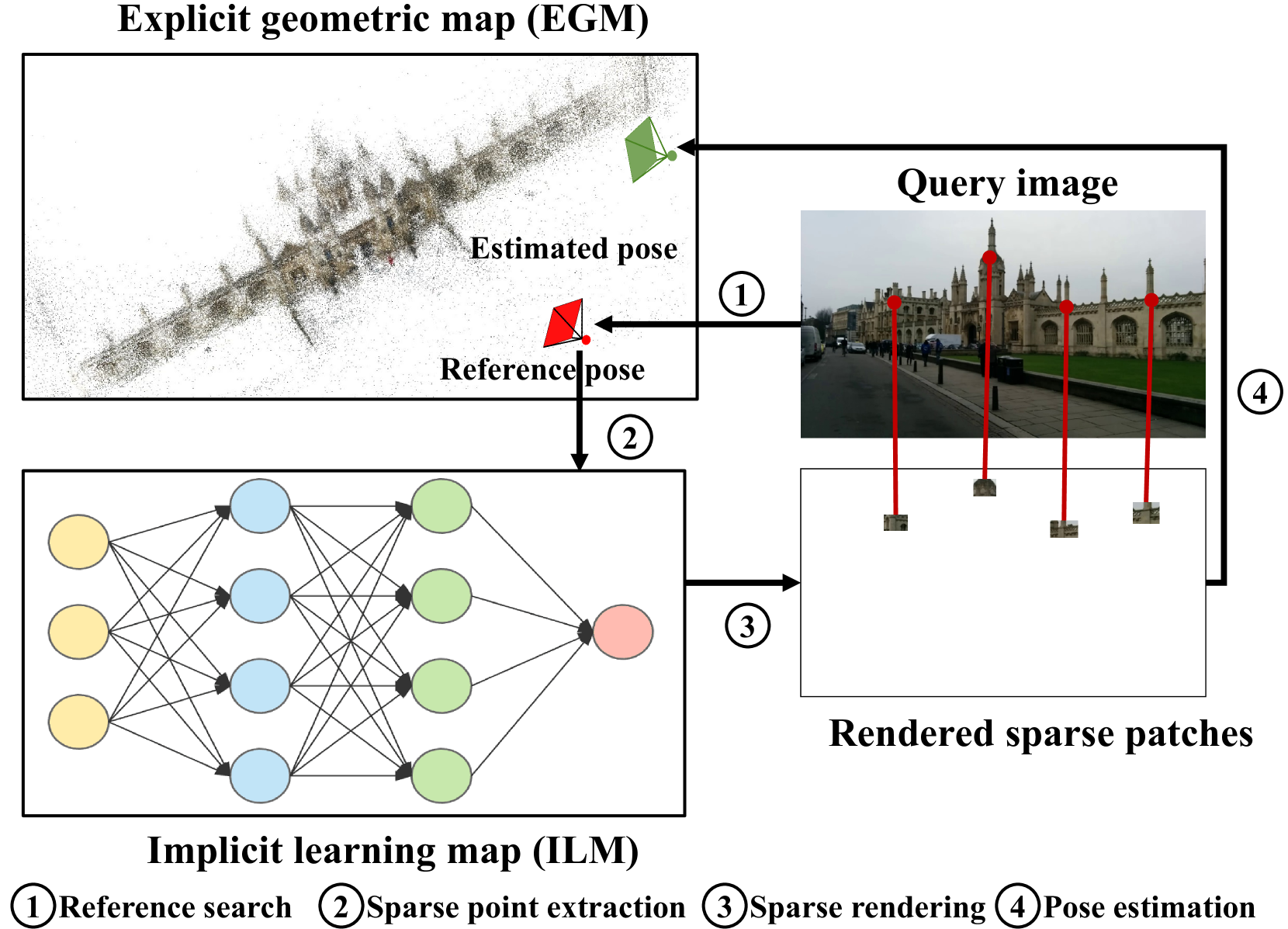
Visual relocalization is a key technique to autonomous driving, robotics, and virtual/augmented reality. After decades of explorations, absolute pose regression (APR), scene coordinate regression (SCR), and hierarchical methods (HMs) have become the most popular frameworks. However, in spite of high efficiency, APRs and SCRs have limited accuracy especially in large-scale outdoor scenes; HMs are accurate but need to store a large number of 2D descriptors for matching, resulting in poor efficiency. In this paper, we propose an efficient and accurate framework, called VRS-NeRF, for visual relocalization with sparse neural radiance field. Precisely, we introduce an explicit geometric map (EGM) for 3D map representation and an implicit learning map (ILM) for sparse patches rendering. In this localization process, EGP provides priors of spare 2D points and ILM utilizes these sparse points to render patches with sparse NeRFs for matching. This allows us to discard a large number of 2D descriptors so as to reduce the map size. Moreover, rendering patches only for useful points rather than all pixels in the whole image reduces the rendering time significantly. This framework inherits the accuracy of HMs and discards their low efficiency. Experiments on 7Scenes, CambridgeLandmarks, and Aachen datasets show that our method gives much better accuracy than APRs and SCRs, and close performance to HMs but is much more efficient.
4/16/2024

CT-NeRF: Incremental Optimizing Neural Radiance Field and Poses with Complex Trajectory
Yunlong Ran, Yanxu Li, Qi Ye, Yuchi Huo, Zechun Bai, Jiahao Sun, Jiming Chen
0
0
Neural radiance field (NeRF) has achieved impressive results in high-quality 3D scene reconstruction. However, NeRF heavily relies on precise camera poses. While recent works like BARF have introduced camera pose optimization within NeRF, their applicability is limited to simple trajectory scenes. Existing methods struggle while tackling complex trajectories involving large rotations. To address this limitation, we propose CT-NeRF, an incremental reconstruction optimization pipeline using only RGB images without pose and depth input. In this pipeline, we first propose a local-global bundle adjustment under a pose graph connecting neighboring frames to enforce the consistency between poses to escape the local minima caused by only pose consistency with the scene structure. Further, we instantiate the consistency between poses as a reprojected geometric image distance constraint resulting from pixel-level correspondences between input image pairs. Through the incremental reconstruction, CT-NeRF enables the recovery of both camera poses and scene structure and is capable of handling scenes with complex trajectories. We evaluate the performance of CT-NeRF on two real-world datasets, NeRFBuster and Free-Dataset, which feature complex trajectories. Results show CT-NeRF outperforms existing methods in novel view synthesis and pose estimation accuracy.
4/24/2024

Fast Global Localization on Neural Radiance Field
Mangyu Kong, Seongwon Lee, Jaewon Lee, Euntai Kim
0
0
Neural Radiance Fields (NeRF) presented a novel way to represent scenes, allowing for high-quality 3D reconstruction from 2D images. Following its remarkable achievements, global localization within NeRF maps is an essential task for enabling a wide range of applications. Recently, Loc-NeRF demonstrated a localization approach that combines traditional Monte Carlo Localization with NeRF, showing promising results for using NeRF as an environment map. However, despite its advancements, Loc-NeRF encounters the challenge of a time-intensive ray rendering process, which can be a significant limitation in practical applications. To address this issue, we introduce Fast Loc-NeRF, which leverages a coarse-to-fine approach to enable more efficient and accurate NeRF map-based global localization. Specifically, Fast Loc-NeRF matches rendered pixels and observed images on a multi-resolution from low to high resolution. As a result, it speeds up the costly particle update process while maintaining precise localization results. Additionally, to reject the abnormal particles, we propose particle rejection weighting, which estimates the uncertainty of particles by exploiting NeRF's characteristics and considers them in the particle weighting process. Our Fast Loc-NeRF sets new state-of-the-art localization performances on several benchmarks, convincing its accuracy and efficiency.
6/19/2024
🧠
Novel View Synthesis with Neural Radiance Fields for Industrial Robot Applications
Markus Hillemann, Robert Langendorfer, Max Heiken, Max Mehltretter, Andreas Schenk, Martin Weinmann, Stefan Hinz, Christian Heipke, Markus Ulrich
0
0
Neural Radiance Fields (NeRFs) have become a rapidly growing research field with the potential to revolutionize typical photogrammetric workflows, such as those used for 3D scene reconstruction. As input, NeRFs require multi-view images with corresponding camera poses as well as the interior orientation. In the typical NeRF workflow, the camera poses and the interior orientation are estimated in advance with Structure from Motion (SfM). But the quality of the resulting novel views, which depends on different parameters such as the number and distribution of available images, as well as the accuracy of the related camera poses and interior orientation, is difficult to predict. In addition, SfM is a time-consuming pre-processing step, and its quality strongly depends on the image content. Furthermore, the undefined scaling factor of SfM hinders subsequent steps in which metric information is required. In this paper, we evaluate the potential of NeRFs for industrial robot applications. We propose an alternative to SfM pre-processing: we capture the input images with a calibrated camera that is attached to the end effector of an industrial robot and determine accurate camera poses with metric scale based on the robot kinematics. We then investigate the quality of the novel views by comparing them to ground truth, and by computing an internal quality measure based on ensemble methods. For evaluation purposes, we acquire multiple datasets that pose challenges for reconstruction typical of industrial applications, like reflective objects, poor texture, and fine structures. We show that the robot-based pose determination reaches similar accuracy as SfM in non-demanding cases, while having clear advantages in more challenging scenarios. Finally, we present first results of applying the ensemble method to estimate the quality of the synthetic novel view in the absence of a ground truth.
5/8/2024