Fast Global Localization on Neural Radiance Field
2406.12202
0
0

Abstract
Neural Radiance Fields (NeRF) presented a novel way to represent scenes, allowing for high-quality 3D reconstruction from 2D images. Following its remarkable achievements, global localization within NeRF maps is an essential task for enabling a wide range of applications. Recently, Loc-NeRF demonstrated a localization approach that combines traditional Monte Carlo Localization with NeRF, showing promising results for using NeRF as an environment map. However, despite its advancements, Loc-NeRF encounters the challenge of a time-intensive ray rendering process, which can be a significant limitation in practical applications. To address this issue, we introduce Fast Loc-NeRF, which leverages a coarse-to-fine approach to enable more efficient and accurate NeRF map-based global localization. Specifically, Fast Loc-NeRF matches rendered pixels and observed images on a multi-resolution from low to high resolution. As a result, it speeds up the costly particle update process while maintaining precise localization results. Additionally, to reject the abnormal particles, we propose particle rejection weighting, which estimates the uncertainty of particles by exploiting NeRF's characteristics and considers them in the particle weighting process. Our Fast Loc-NeRF sets new state-of-the-art localization performances on several benchmarks, convincing its accuracy and efficiency.
Create account to get full access
Overview
- This paper presents a novel approach for fast global localization on neural radiance fields (NeRF), which are 3D scene representations learned from images.
- The proposed method aims to efficiently determine the camera pose (position and orientation) of a query image with respect to a pre-trained NeRF model.
- The authors introduce a two-stage pipeline that first estimates a coarse initial pose using a neural network, and then refines this pose through iterative optimization.
- This approach enables fast and accurate global localization, which is crucial for applications like augmented reality, robotics, and autonomous driving.
Plain English Explanation
The paper discusses a technique for quickly figuring out the position and orientation of a camera in relation to a 3D scene that has been modeled using a neural radiance field (NeRF). NeRFs are a way of representing 3D environments by learning from a set of images. The key idea is to have a two-step process: first, a neural network provides an initial, rough estimate of the camera's pose (location and direction). Then, this initial estimate is refined through an optimization process to get the final, accurate pose.
This is important because being able to quickly and precisely determine the camera's position and orientation is essential for applications like augmented reality, where virtual objects need to be seamlessly integrated into the real world, as well as for robotics and autonomous vehicles, which need to understand their surroundings. The authors' approach aims to make this process more efficient compared to previous methods.
Technical Explanation
The paper's key contribution is a two-stage pipeline for fast global localization on NeRF models. In the first stage, the method uses a neural network to estimate a coarse initial camera pose from a query image. This initial pose estimate is then refined in the second stage through an iterative optimization process that aligns the query image with the NeRF representation.
The initial pose estimation is performed by a convolutional neural network that takes the query image as input and outputs the 6-DoF camera pose (3D position and 3D orientation). This network is trained on a dataset of NeRF-based scenes, learning to predict the correct pose from the visual information in the images.
The refinement stage then uses this initial pose estimate as a starting point for an optimization-based alignment procedure. This involves rendering the NeRF scene from the current pose estimate, computing the photometric and geometric discrepancy between the rendered image and the query image, and then updating the pose to minimize this discrepancy. This iterative process converges to the final, accurate camera pose.
The authors evaluate their method on several benchmark datasets, showing that it can achieve state-of-the-art performance in terms of both speed and accuracy compared to prior approaches for camera localization on NeRF models, such as VRS-NeRF and Multi-Tiling NeRF.
Critical Analysis
The paper presents a well-designed and thorough evaluation of the proposed method, comparing it to several relevant baselines on standard benchmarks. The authors acknowledge some limitations, such as the need for a pre-trained NeRF model and the potential for the optimization-based refinement to get stuck in local minima.
One area that could be explored further is the robustness of the method to challenging real-world conditions, such as occlusions, dynamic elements, or significant changes in lighting. The authors focus on controlled, synthetic environments, and it would be valuable to see how the approach performs in more complex, realistic scenarios.
Additionally, the authors could delve deeper into the tradeoffs between the speed and accuracy of their method. While they demonstrate impressive results, it would be helpful to understand the specific factors that influence the performance, such as the network architecture, optimization hyperparameters, or the size and complexity of the NeRF models.
Overall, the paper makes a compelling contribution to the field of camera localization on neural radiance fields, providing a novel and efficient solution with promising real-world applications. The clear technical explanations and thorough evaluation set a strong foundation for further research in this area.
Conclusion
This paper presents a novel two-stage approach for fast global localization on neural radiance fields (NeRFs), which are 3D scene representations learned from images. The method first uses a neural network to estimate a coarse initial camera pose, and then refines this pose through an iterative optimization process. This enables accurate and efficient camera localization, which is crucial for applications like augmented reality, robotics, and autonomous driving.
The authors demonstrate state-of-the-art performance on standard benchmarks, while also acknowledging some limitations and suggesting avenues for future research. Overall, this work represents a significant advancement in the field of camera localization on NeRF models, with the potential to unlock new capabilities in a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
0
0
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
5/10/2024
🧠
Camera Relocalization in Shadow-free Neural Radiance Fields
Shiyao Xu, Caiyun Liu, Yuantao Chen, Zhenxin Zhu, Zike Yan, Yongliang Shi, Hao Zhao, Guyue Zhou
0
0
Camera relocalization is a crucial problem in computer vision and robotics. Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images. Several works have utilized NeRFs for refining camera poses, but they do not account for lighting changes that can affect scene appearance and shadow regions, causing a degraded pose optimization process. In this paper, we propose a two-staged pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization. We implement our scene representation upon a hash-encoded NeRF which significantly boosts up the pose optimization process. To account for the noisy image gradient computing problem in grid-based NeRFs, we further propose a re-devised truncated dynamic low-pass filter (TDLF) and a numerical gradient averaging technique to smoothen the process. Experimental results on several datasets with varying lighting conditions demonstrate that our method achieves state-of-the-art results in camera relocalization under varying lighting conditions. Code and data will be made publicly available.
5/24/2024
🧠
Multi-tiling Neural Radiance Field (NeRF) -- Geometric Assessment on Large-scale Aerial Datasets
Ningli Xu, Rongjun Qin, Debao Huang, Fabio Remondino
0
0
Neural Radiance Fields (NeRF) offer the potential to benefit 3D reconstruction tasks, including aerial photogrammetry. However, the scalability and accuracy of the inferred geometry are not well-documented for large-scale aerial assets,since such datasets usually result in very high memory consumption and slow convergence.. In this paper, we aim to scale the NeRF on large-scael aerial datasets and provide a thorough geometry assessment of NeRF. Specifically, we introduce a location-specific sampling technique as well as a multi-camera tiling (MCT) strategy to reduce memory consumption during image loading for RAM, representation training for GPU memory, and increase the convergence rate within tiles. MCT decomposes a large-frame image into multiple tiled images with different camera models, allowing these small-frame images to be fed into the training process as needed for specific locations without a loss of accuracy. We implement our method on a representative approach, Mip-NeRF, and compare its geometry performance with threephotgrammetric MVS pipelines on two typical aerial datasets against LiDAR reference data. Both qualitative and quantitative results suggest that the proposed NeRF approach produces better completeness and object details than traditional approaches, although as of now, it still falls short in terms of accuracy.
6/7/2024
VRS-NeRF: Visual Relocalization with Sparse Neural Radiance Field
Fei Xue, Ignas Budvytis, Daniel Olmeda Reino, Roberto Cipolla
0
0
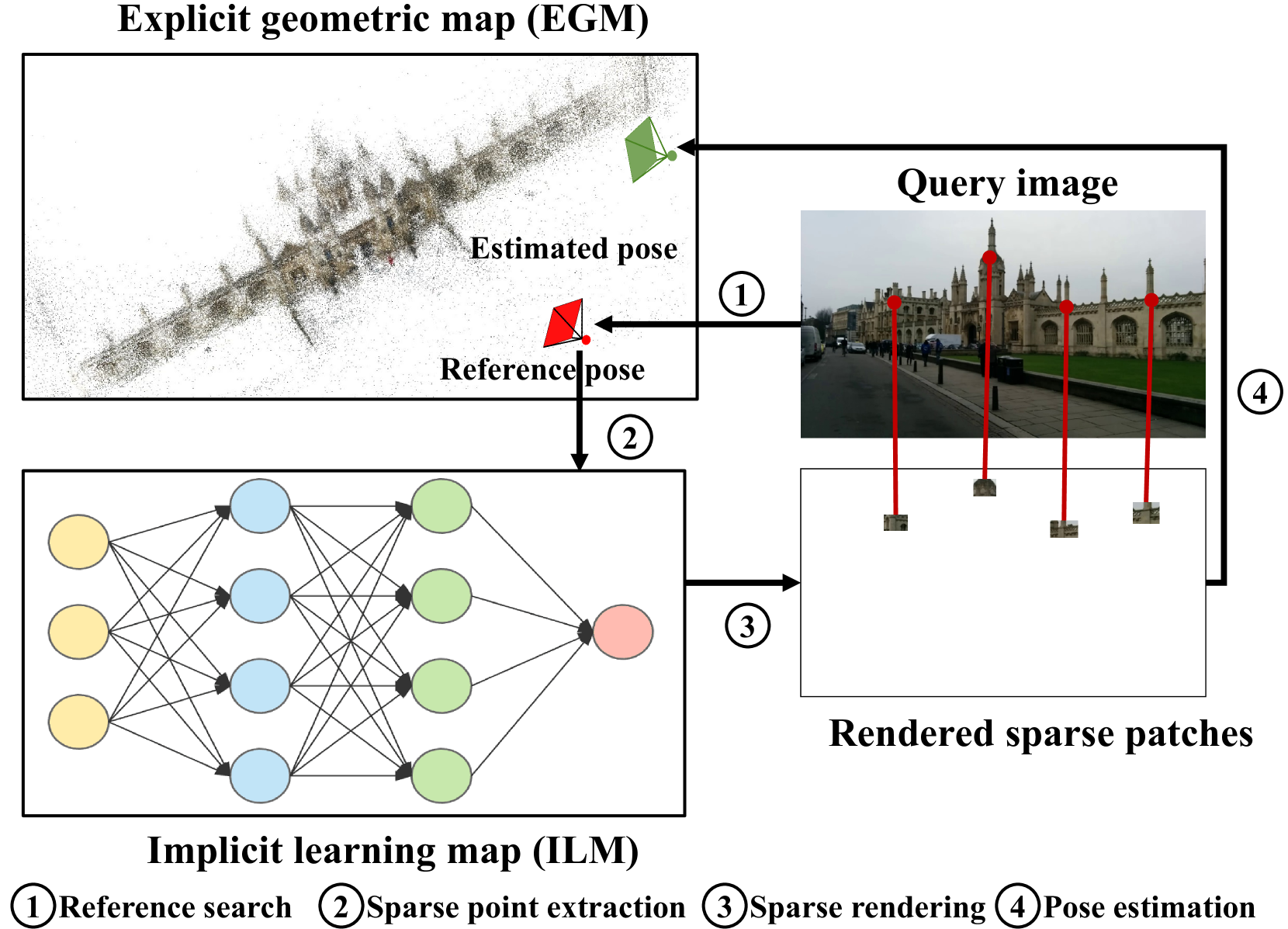
Visual relocalization is a key technique to autonomous driving, robotics, and virtual/augmented reality. After decades of explorations, absolute pose regression (APR), scene coordinate regression (SCR), and hierarchical methods (HMs) have become the most popular frameworks. However, in spite of high efficiency, APRs and SCRs have limited accuracy especially in large-scale outdoor scenes; HMs are accurate but need to store a large number of 2D descriptors for matching, resulting in poor efficiency. In this paper, we propose an efficient and accurate framework, called VRS-NeRF, for visual relocalization with sparse neural radiance field. Precisely, we introduce an explicit geometric map (EGM) for 3D map representation and an implicit learning map (ILM) for sparse patches rendering. In this localization process, EGP provides priors of spare 2D points and ILM utilizes these sparse points to render patches with sparse NeRFs for matching. This allows us to discard a large number of 2D descriptors so as to reduce the map size. Moreover, rendering patches only for useful points rather than all pixels in the whole image reduces the rendering time significantly. This framework inherits the accuracy of HMs and discards their low efficiency. Experiments on 7Scenes, CambridgeLandmarks, and Aachen datasets show that our method gives much better accuracy than APRs and SCRs, and close performance to HMs but is much more efficient.
4/16/2024