VRS-NeRF: Visual Relocalization with Sparse Neural Radiance Field
2404.09271
0
0
Abstract
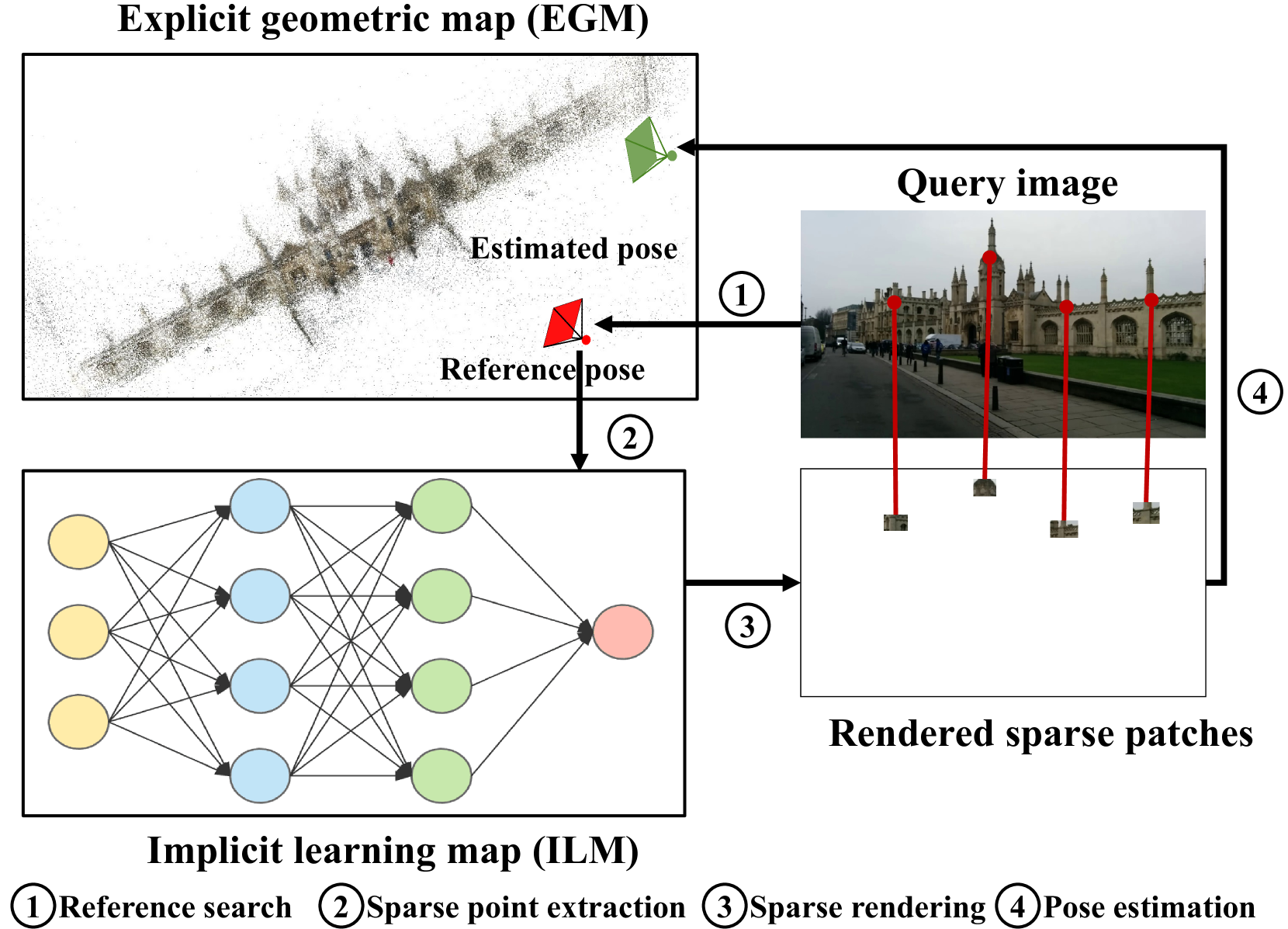
Visual relocalization is a key technique to autonomous driving, robotics, and virtual/augmented reality. After decades of explorations, absolute pose regression (APR), scene coordinate regression (SCR), and hierarchical methods (HMs) have become the most popular frameworks. However, in spite of high efficiency, APRs and SCRs have limited accuracy especially in large-scale outdoor scenes; HMs are accurate but need to store a large number of 2D descriptors for matching, resulting in poor efficiency. In this paper, we propose an efficient and accurate framework, called VRS-NeRF, for visual relocalization with sparse neural radiance field. Precisely, we introduce an explicit geometric map (EGM) for 3D map representation and an implicit learning map (ILM) for sparse patches rendering. In this localization process, EGP provides priors of spare 2D points and ILM utilizes these sparse points to render patches with sparse NeRFs for matching. This allows us to discard a large number of 2D descriptors so as to reduce the map size. Moreover, rendering patches only for useful points rather than all pixels in the whole image reduces the rendering time significantly. This framework inherits the accuracy of HMs and discards their low efficiency. Experiments on 7Scenes, CambridgeLandmarks, and Aachen datasets show that our method gives much better accuracy than APRs and SCRs, and close performance to HMs but is much more efficient.
Create account to get full access
Overview
- This paper proposes a new method called VRS-NeRF (Visual Relocalization with Sparse Neural Radiance Field) for visual relocalization, which is the process of determining the camera pose (position and orientation) of an image within a 3D environment.
- The method uses a sparse neural radiance field (NeRF) to represent the 3D environment and a neural network to predict the camera pose from a single input image.
- The key innovations are the use of a sparse NeRF representation and a novel training procedure that allows the model to generalize to new environments without retraining.
Plain English Explanation
VRS-NeRF is a technique that helps a camera or device figure out where it is in a 3D space, just by looking at a single image. This is important for applications like augmented reality or robotics, where a system needs to know its exact location and orientation to overlay digital content or navigate properly.
The key idea is to create a sparse 3D model of the environment using a neural radiance field (NeRF). This NeRF acts like a compact, learned representation of the 3D space, capturing the appearance and geometry of the scene. Then, a neural network is trained to look at a single image and figure out where the camera that took that image is located within the NeRF model.
The innovation here is that the NeRF model is "sparse", meaning it uses fewer parameters to represent the 3D space, making it more efficient. Additionally, the training process allows the overall system to be applied to new environments without having to retrain the whole model from scratch, which is a significant advantage.
Technical Explanation
The VRS-NeRF method consists of two main components: a sparse neural radiance field (NeRF) that represents the 3D environment, and a neural network that predicts the camera pose from a single input image.
The sparse NeRF representation is built by first capturing a set of images of the environment and their corresponding camera poses. This data is used to train a NeRF model, but with a key difference: the NeRF is trained to be sparse, using fewer parameters to represent the scene. This is achieved through a novel regularization technique that encourages the model to focus on the most important visual features.
The second component is a neural network that takes a single input image and predicts the camera pose (position and orientation) of that image within the NeRF model. This network is trained using the same dataset of images and poses used to build the NeRF, but with a specialized loss function that allows the model to generalize to new environments without retraining.
The authors demonstrate the effectiveness of VRS-NeRF on several datasets, showing that it can achieve accurate camera pose estimation while being more efficient than traditional NeRF-based methods. This makes it a promising approach for applications that require real-time, scalable visual relocalization, such as augmented reality, robotics, and SLAM.
Critical Analysis
The VRS-NeRF paper presents a compelling approach to visual relocalization, but there are a few potential limitations and areas for further research:
-
The authors note that the sparse NeRF representation may not be suitable for highly complex or detailed environments, as the sparsity constraints could lead to a loss of important visual information. Further research may be needed to strike the right balance between efficiency and accuracy.
-
The generalization to new environments is an important advantage, but the authors do not provide a thorough analysis of the model's performance on a diverse set of environments. Additional testing would help validate the claimed benefits of the approach.
-
While the paper demonstrates the effectiveness of VRS-NeRF for camera pose estimation, it does not explore other potential applications, such as semantic mapping or object detection. Expanding the research to these areas could further showcase the versatility of the method.
Overall, the VRS-NeRF paper presents a promising step forward in the field of visual relocalization, with potential implications for a wide range of applications. As with any research, continued exploration and critical analysis will be essential to refine and validate the approach.
Conclusion
The VRS-NeRF method offers a novel approach to visual relocalization, utilizing a sparse neural radiance field (NeRF) representation and a specialized neural network to predict camera poses from single images. This technique aims to provide a more efficient and generalizable solution compared to traditional NeRF-based methods, with potential applications in augmented reality, robotics, and SLAM.
The key contributions of this research include the development of a sparse NeRF representation and a training procedure that allows the model to be applied to new environments without retraining. While the paper demonstrates promising results, further investigation into the method's performance on diverse environments and its potential for broader applications could help solidify its impact on the field.
Overall, the VRS-NeRF paper represents an exciting advancement in the field of visual relocalization, with the potential to enable more scalable and efficient solutions for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧠
Camera Relocalization in Shadow-free Neural Radiance Fields
Shiyao Xu, Caiyun Liu, Yuantao Chen, Zhenxin Zhu, Zike Yan, Yongliang Shi, Hao Zhao, Guyue Zhou
0
0
Camera relocalization is a crucial problem in computer vision and robotics. Recent advancements in neural radiance fields (NeRFs) have shown promise in synthesizing photo-realistic images. Several works have utilized NeRFs for refining camera poses, but they do not account for lighting changes that can affect scene appearance and shadow regions, causing a degraded pose optimization process. In this paper, we propose a two-staged pipeline that normalizes images with varying lighting and shadow conditions to improve camera relocalization. We implement our scene representation upon a hash-encoded NeRF which significantly boosts up the pose optimization process. To account for the noisy image gradient computing problem in grid-based NeRFs, we further propose a re-devised truncated dynamic low-pass filter (TDLF) and a numerical gradient averaging technique to smoothen the process. Experimental results on several datasets with varying lighting conditions demonstrate that our method achieves state-of-the-art results in camera relocalization under varying lighting conditions. Code and data will be made publicly available.
5/24/2024
NVINS: Robust Visual Inertial Navigation Fused with NeRF-augmented Camera Pose Regressor and Uncertainty Quantification
Juyeop Han, Lukas Lao Beyer, Guilherme V. Cavalheiro, Sertac Karaman
0
0
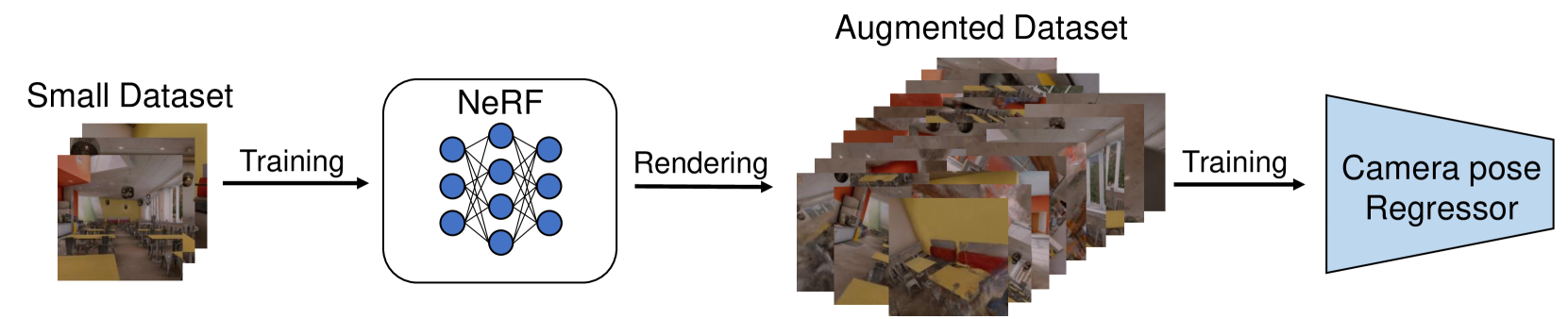
In recent years, Neural Radiance Fields (NeRF) have emerged as a powerful tool for 3D reconstruction and novel view synthesis. However, the computational cost of NeRF rendering and degradation in quality due to the presence of artifacts pose significant challenges for its application in real-time and robust robotic tasks, especially on embedded systems. This paper introduces a novel framework that integrates NeRF-derived localization information with Visual-Inertial Odometry(VIO) to provide a robust solution for robotic navigation in a real-time. By training an absolute pose regression network with augmented image data rendered from a NeRF and quantifying its uncertainty, our approach effectively counters positional drift and enhances system reliability. We also establish a mathematically sound foundation for combining visual inertial navigation with camera localization neural networks, considering uncertainty under a Bayesian framework. Experimental validation in the photorealistic simulation environment demonstrates significant improvements in accuracy compared to a conventional VIO approach.
4/3/2024
🧠
Benchmarking Neural Radiance Fields for Autonomous Robots: An Overview
Yuhang Ming, Xingrui Yang, Weihan Wang, Zheng Chen, Jinglun Feng, Yifan Xing, Guofeng Zhang
0
0
Neural Radiance Fields (NeRF) have emerged as a powerful paradigm for 3D scene representation, offering high-fidelity renderings and reconstructions from a set of sparse and unstructured sensor data. In the context of autonomous robotics, where perception and understanding of the environment are pivotal, NeRF holds immense promise for improving performance. In this paper, we present a comprehensive survey and analysis of the state-of-the-art techniques for utilizing NeRF to enhance the capabilities of autonomous robots. We especially focus on the perception, localization and navigation, and decision-making modules of autonomous robots and delve into tasks crucial for autonomous operation, including 3D reconstruction, segmentation, pose estimation, simultaneous localization and mapping (SLAM), navigation and planning, and interaction. Our survey meticulously benchmarks existing NeRF-based methods, providing insights into their strengths and limitations. Moreover, we explore promising avenues for future research and development in this domain. Notably, we discuss the integration of advanced techniques such as 3D Gaussian splatting (3DGS), large language models (LLM), and generative AIs, envisioning enhanced reconstruction efficiency, scene understanding, decision-making capabilities. This survey serves as a roadmap for researchers seeking to leverage NeRFs to empower autonomous robots, paving the way for innovative solutions that can navigate and interact seamlessly in complex environments.
5/10/2024

Fast Global Localization on Neural Radiance Field
Mangyu Kong, Seongwon Lee, Jaewon Lee, Euntai Kim
0
0
Neural Radiance Fields (NeRF) presented a novel way to represent scenes, allowing for high-quality 3D reconstruction from 2D images. Following its remarkable achievements, global localization within NeRF maps is an essential task for enabling a wide range of applications. Recently, Loc-NeRF demonstrated a localization approach that combines traditional Monte Carlo Localization with NeRF, showing promising results for using NeRF as an environment map. However, despite its advancements, Loc-NeRF encounters the challenge of a time-intensive ray rendering process, which can be a significant limitation in practical applications. To address this issue, we introduce Fast Loc-NeRF, which leverages a coarse-to-fine approach to enable more efficient and accurate NeRF map-based global localization. Specifically, Fast Loc-NeRF matches rendered pixels and observed images on a multi-resolution from low to high resolution. As a result, it speeds up the costly particle update process while maintaining precise localization results. Additionally, to reject the abnormal particles, we propose particle rejection weighting, which estimates the uncertainty of particles by exploiting NeRF's characteristics and considers them in the particle weighting process. Our Fast Loc-NeRF sets new state-of-the-art localization performances on several benchmarks, convincing its accuracy and efficiency.
6/19/2024