Capability-based Frameworks for Industrial Robot Skills: a Survey

0
🧪
Sign in to get full access
Overview
- The research community is puzzled by the terminology used to describe robots' capabilities, such as "skill," "action," and "atomic unit."
- Standardizing these descriptions is necessary to integrate robot capabilities into industrial scenarios.
- This work uses a structured review approach to identify commonalities and differences in the research community's robot skill frameworks.
Plain English Explanation
The paper examines the language and concepts used to describe what robots can do, such as skills, actions, and "atomic units." Researchers in this field use many different terms, which can make it difficult to understand and apply robot capabilities in real-world industrial settings.
To address this, the researchers conducted a thorough review of 210 research papers to find common themes and differences in how robot skills are defined and categorized. They discovered three main insights:
- Most researchers agree on a general taxonomy that divides robot capabilities into tasks, skills, and primitives.
- The most widely studied robot capabilities are pick and place operations.
- Industrial applications tend to focus on simpler robot capabilities with fixed parameters, while prioritizing safety aspects.
The paper emphasizes that future research should use this task-skill-primitive taxonomy to align with existing work. It also calls for more research into how to describe parametric robot capabilities in industrial settings, while ensuring safety.
Technical Explanation
The researchers used a structured literature review approach to analyze 210 research papers on robot skill frameworks. They identified three key findings:
-
Taxonomy Agreement: The vast majority of authors agree on a high-level taxonomy that divides robot capabilities into tasks (the goals robots are trying to achieve), skills (the underlying abilities that enable those tasks), and primitives (the basic building blocks of skills).
-
Capability Focus: The most widely studied robot capabilities are pick and place operations, where a robot grasps an object and moves it to a new location.
-
Industrial Orientation: Industrial applications tend to focus on simpler robot capabilities with fixed parameters, rather than more complex parametric capabilities. However, these industrial systems prioritize safety aspects.
Critical Analysis
The paper provides a valuable synthesis of the terminology and taxonomies used in the robot skills research community. By identifying common themes and differences, it highlights the need for greater standardization to enable the integration of robot capabilities into industrial scenarios.
However, the paper also acknowledges that further research is needed, particularly in the industrial domain. While industrial applications focus on simpler, fixed-parameter robot capabilities, there is a need to explore more parametric and flexible robot skills that can adapt to dynamic environments. Ensuring safety in these more complex systems will also be a key challenge.
Additionally, the paper's structured review approach is limited to the specific set of 210 papers analyzed. There may be other relevant research or perspectives not captured in this sample. Expanding the review to a broader range of literature could uncover additional insights or alternative taxonomies.
Conclusion
This paper provides a valuable synthesis of the terminology and taxonomies used to describe robot capabilities in the research community. It highlights the need for greater standardization to enable the integration of robot skills into industrial scenarios.
The key findings - the agreement on a task-skill-primitive taxonomy, the focus on pick and place capabilities, and the industrial emphasis on simpler, fixed-parameter systems - offer a foundation for future research and development in this area. However, the paper also identifies the need for more work in exploring parametric robot capabilities and ensuring safety in industrial settings.
By addressing these gaps, the research community can continue to advance the state of the art in robot skills and pave the way for more widespread adoption in real-world industrial applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🧪
0
Capability-based Frameworks for Industrial Robot Skills: a Survey
Matteo Pantano, Thomas Eiband, Dongheui Lee
The research community is puzzled with words like skill, action, atomic unit and others when describing robots' capabilities. However, for giving the possibility to integrate capabilities in industrial scenarios, a standardization of these descriptions is necessary. This work uses a structured review approach to identify commonalities and differences in the research community of robots' skill frameworks. Through this method, 210 papers were analyzed and three main results were obtained. First, the vast majority of authors agree on a taxonomy based on task, skill and primitive. Second, the most investigated robots' capabilities are pick and place. Third, industrial oriented applications focus more on simple robots' capabilities with fixed parameters while ensuring safety aspects. Therefore, this work emphasizes that a taxonomy based on task, skill and primitives should be used by future works to align with existing literature. Moreover, further research is needed in the industrial domain for parametric robots' capabilities while ensuring safety.
Read more8/28/2024
↗️
0
Programming of Skill-based Robots
Taneli Lohi, Samuli Soutukorva, Tapio Heikkila
Manufacturing is facing ever changing market demands, with faster innovation cycles resulting to growing agility and flexibility requirements. Industry 4.0 has been transforming the manufacturing world towards digital automation and the importance of software has increased drastically. Easy and fast task programming and execution in robot - sensor systems become a prerequisite for agile and flexible automation and in this paper, we propose such a system. Our solution relies on a robot skill library, which provides the user with high level and parametrized operations, i.e., robot skills, for task programming and execution. Programming actions results to a control recipe in a neutral product context and is based on use of product CAD models or alternatively collaborative use of pointers and tracking sensor with real parts. Practical tests are also reported to show the feasibility of our approach.
Read more9/26/2024
📉
0
A Framework for Learning and Reusing Robotic Skills
Brendan Hertel, Nhu Tran, Meriem Elkoudi, Reza Azadeh
In this paper, we present our work in progress towards creating a library of motion primitives. This library facilitates easier and more intuitive learning and reusing of robotic skills. Users can teach robots complex skills through Learning from Demonstration, which is automatically segmented into primitives and stored in clusters of similar skills. We propose a novel multimodal segmentation method as well as a novel trajectory clustering method. Then, when needed for reuse, we transform primitives into new environments using trajectory editing. We present simulated results for our framework with demonstrations taken on real-world robots.
Read more7/1/2024
0
Agentic Skill Discovery
Xufeng Zhao, Cornelius Weber, Stefan Wermter
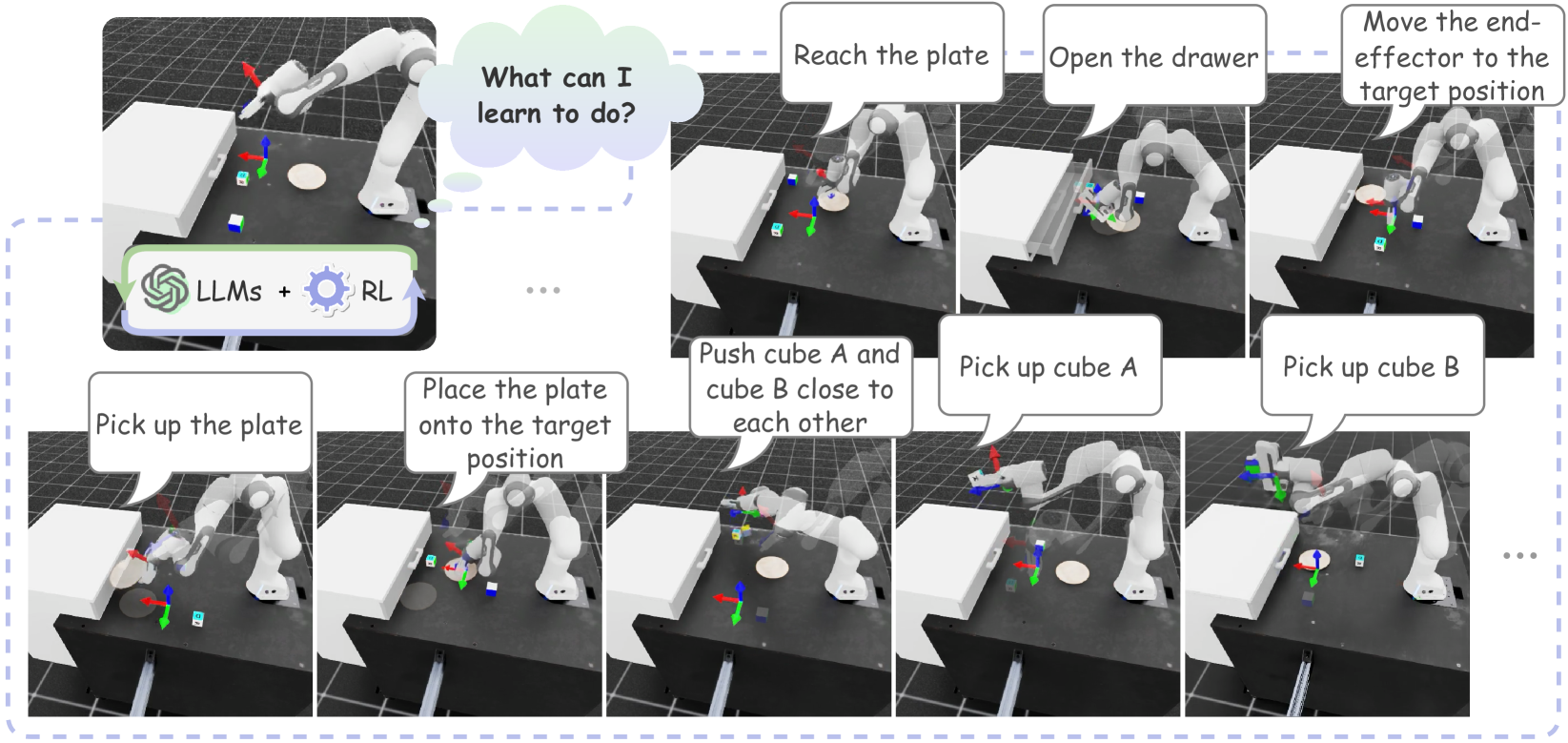
Language-conditioned robotic skills make it possible to apply the high-level reasoning of Large Language Models (LLMs) to low-level robotic control. A remaining challenge is to acquire a diverse set of fundamental skills. Existing approaches either manually decompose a complex task into atomic robotic actions in a top-down fashion, or bootstrap as many combinations as possible in a bottom-up fashion to cover a wider range of task possibilities. These decompositions or combinations, however, require an initial skill library. For example, a ``grasping'' capability can never emerge from a skill library containing only diverse ``pushing'' skills. Existing skill discovery techniques with reinforcement learning acquire skills by an exhaustive exploration but often yield non-meaningful behaviors. In this study, we introduce a novel framework for skill discovery that is entirely driven by LLMs. The framework begins with an LLM generating task proposals based on the provided scene description and the robot's configurations, aiming to incrementally acquire new skills upon task completion. For each proposed task, a series of reinforcement learning processes are initiated, utilizing reward and success determination functions sampled by the LLM to develop the corresponding policy. The reliability and trustworthiness of learned behaviors are further ensured by an independent vision-language model. We show that starting with zero skill, the skill library emerges and expands to more and more meaningful and reliable skills, enabling the robot to efficiently further propose and complete advanced tasks. Project page: url{https://agentic-skill-discovery.github.io}.
Read more8/19/2024