CarDreamer: Open-Source Learning Platform for World Model based Autonomous Driving

0

Sign in to get full access
Overview
- CarDreamer is an open-source learning platform for autonomous driving that uses world models
- It aims to enable research and development of advanced autonomous driving systems
- The platform leverages recent advances in world modeling, multi-agent learning, and deep reinforcement learning
Plain English Explanation
CarDreamer is a new open-source platform that researchers and developers can use to work on autonomous driving systems. It is designed to take advantage of recent breakthroughs in world modeling, multi-agent learning, and deep reinforcement learning.
The key idea behind CarDreamer is to build a "world model" - a machine learning model that can accurately simulate the complex driving environment, including the behavior of other vehicles, pedestrians, and road conditions. By training AI agents to navigate this simulated world, they can learn effective driving strategies without the risk and expense of training on real roads.
CarDreamer provides a flexible and extensible platform that researchers can use to experiment with new world modeling techniques, reinforcement learning algorithms, and other innovations in autonomous driving. The goal is to accelerate progress in this important field and eventually enable safe, reliable self-driving cars.
Technical Explanation
CarDreamer is built on top of the DriveWorld and Co-Driver platforms, which provide pre-trained perception and prediction models for the driving environment. It extends these foundations with new world modeling, multi-agent, and reinforcement learning capabilities.
The core components of CarDreamer include:
-
World Modeling: CarDreamer uses advanced neural network architectures to build differentiable world models that can accurately simulate the complex, multi-agent driving environment. These models are trained on large-scale driving data to capture the dynamics of vehicles, pedestrians, traffic signals, and other relevant elements.
-
Multi-Agent Learning: The platform supports training autonomous driving agents in a multi-agent setting, where they must learn to cooperate and coordinate with other vehicles to navigate the environment safely and efficiently.
-
Deep Reinforcement Learning: CarDreamer leverages deep reinforcement learning algorithms to enable agents to explore and learn optimal driving policies within the simulated world model. This includes techniques like DriveRealm that combine world models with large language models for enhanced performance.
The paper presents experiments demonstrating the capabilities of CarDreamer in training autonomous driving agents to navigate complex urban environments, handle challenging scenarios, and generalize to new situations. The results show promising improvements over previous approaches, suggesting that world model-based techniques can be a powerful tool for advancing autonomous driving research and development.
Critical Analysis
The CarDreamer platform represents an important step forward in the field of autonomous driving, but it also has some potential limitations and areas for further research:
- The accuracy and fidelity of the world models are crucial for the success of the approach, and more work is needed to ensure they can capture the full complexity of real-world driving scenarios, including rare or edge cases.
- The multi-agent learning aspect of CarDreamer is a significant challenge, as coordinating the behavior of multiple autonomous vehicles in a dynamic environment is an inherently difficult problem that requires further investigation.
- The paper does not provide a comprehensive analysis of the computational and data requirements for training the world models and reinforcement learning agents, which could be a barrier to widespread adoption.
- While the results are promising, more extensive real-world testing and validation would be needed to demonstrate the robustness and safety of CarDreamer-based autonomous driving systems.
Overall, CarDreamer represents an important contribution to the field of autonomous driving, but there is still significant work to be done to turn this research platform into a practical, deployable system. Continued advancements in world modeling, multi-agent learning, and reinforcement learning will be key to realizing the full potential of this approach.
Conclusion
CarDreamer is an open-source learning platform that aims to accelerate progress in autonomous driving research and development. By leveraging recent advancements in world modeling, multi-agent learning, and deep reinforcement learning, the platform provides a flexible and extensible framework for training and evaluating self-driving agents in simulated environments.
The key innovation of CarDreamer is its focus on building accurate, differentiable world models that can capture the complex dynamics of the driving environment, including the behavior of other vehicles, pedestrians, and road conditions. By training agents to navigate these simulated worlds, the platform enables researchers to explore new algorithms and strategies for autonomous driving without the risks and costs of real-world testing.
While CarDreamer represents an important step forward, there are still significant challenges to overcome, such as improving the fidelity of the world models, addressing the complexities of multi-agent coordination, and validating the safety and robustness of the trained systems. Nonetheless, the platform's open-source nature and focus on enabling further research in this critical field make it a valuable contribution to the ongoing efforts to develop safe and reliable self-driving cars.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CarDreamer: Open-Source Learning Platform for World Model based Autonomous Driving
Dechen Gao, Shuangyu Cai, Hanchu Zhou, Hang Wang, Iman Soltani, Junshan Zhang
To safely navigate intricate real-world scenarios, autonomous vehicles must be able to adapt to diverse road conditions and anticipate future events. World model (WM) based reinforcement learning (RL) has emerged as a promising approach by learning and predicting the complex dynamics of various environments. Nevertheless, to the best of our knowledge, there does not exist an accessible platform for training and testing such algorithms in sophisticated driving environments. To fill this void, we introduce CarDreamer, the first open-source learning platform designed specifically for developing WM based autonomous driving algorithms. It comprises three key components: 1) World model backbone: CarDreamer has integrated some state-of-the-art WMs, which simplifies the reproduction of RL algorithms. The backbone is decoupled from the rest and communicates using the standard Gym interface, so that users can easily integrate and test their own algorithms. 2) Built-in tasks: CarDreamer offers a comprehensive set of highly configurable driving tasks which are compatible with Gym interfaces and are equipped with empirically optimized reward functions. 3) Task development suite: This suite streamlines the creation of driving tasks, enabling easy definition of traffic flows and vehicle routes, along with automatic collection of multi-modal observation data. A visualization server allows users to trace real-time agent driving videos and performance metrics through a browser. Furthermore, we conduct extensive experiments using built-in tasks to evaluate the performance and potential of WMs in autonomous driving. Thanks to the richness and flexibility of CarDreamer, we also systematically study the impact of observation modality, observability, and sharing of vehicle intentions on AV safety and efficiency. All code and documents are accessible on https://github.com/ucd-dare/CarDreamer.
Read more7/29/2024

0
Think2Drive: Efficient Reinforcement Learning by Thinking in Latent World Model for Quasi-Realistic Autonomous Driving (in CARLA-v2)
Qifeng Li, Xiaosong Jia, Shaobo Wang, Junchi Yan
Real-world autonomous driving (AD) especially urban driving involves many corner cases. The lately released AD simulator CARLA v2 adds 39 common events in the driving scene, and provide more quasi-realistic testbed compared to CARLA v1. It poses new challenge to the community and so far no literature has reported any success on the new scenarios in V2 as existing works mostly have to rely on specific rules for planning yet they cannot cover the more complex cases in CARLA v2. In this work, we take the initiative of directly training a planner and the hope is to handle the corner cases flexibly and effectively, which we believe is also the future of AD. To our best knowledge, we develop the first model-based RL method named Think2Drive for AD, with a world model to learn the transitions of the environment, and then it acts as a neural simulator to train the planner. This paradigm significantly boosts the training efficiency due to the low dimensional state space and parallel computing of tensors in the world model. As a result, Think2Drive is able to run in an expert-level proficiency in CARLA v2 within 3 days of training on a single A6000 GPU, and to our best knowledge, so far there is no reported success (100% route completion)on CARLA v2. We also propose CornerCase-Repository, a benchmark that supports the evaluation of driving models by scenarios. Additionally, we propose a new and balanced metric to evaluate the performance by route completion, infraction number, and scenario density, so that the driving score could give more information about the actual driving performance.
Read more7/23/2024

0
Learning Multiple Probabilistic Decisions from Latent World Model in Autonomous Driving
Lingyu Xiao, Jiang-Jiang Liu, Sen Yang, Xiaofan Li, Xiaoqing Ye, Wankou Yang, Jingdong Wang
The autoregressive world model exhibits robust generalization capabilities in vectorized scene understanding but encounters difficulties in deriving actions due to insufficient uncertainty modeling and self-delusion. In this paper, we explore the feasibility of deriving decisions from an autoregressive world model by addressing these challenges through the formulation of multiple probabilistic hypotheses. We propose LatentDriver, a framework models the environment's next states and the ego vehicle's possible actions as a mixture distribution, from which a deterministic control signal is then derived. By incorporating mixture modeling, the stochastic nature of decisionmaking is captured. Additionally, the self-delusion problem is mitigated by providing intermediate actions sampled from a distribution to the world model. Experimental results on the recently released close-loop benchmark Waymax demonstrate that LatentDriver surpasses state-of-the-art reinforcement learning and imitation learning methods, achieving expert-level performance. The code and models will be made available at https://github.com/Sephirex-X/LatentDriver.
Read more9/25/2024
0
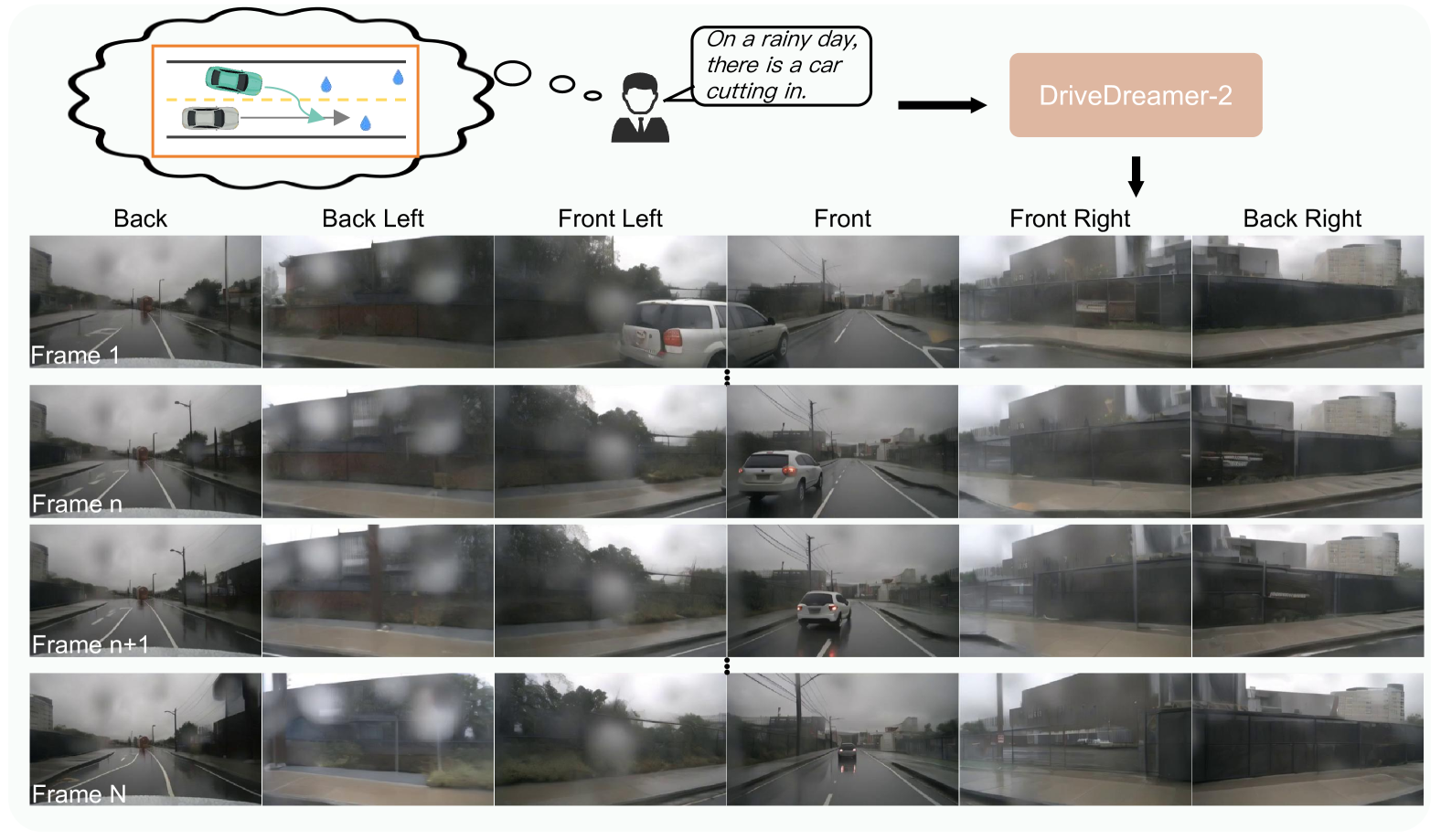
DriveDreamer-2: LLM-Enhanced World Models for Diverse Driving Video Generation
Guosheng Zhao, Xiaofeng Wang, Zheng Zhu, Xinze Chen, Guan Huang, Xiaoyi Bao, Xingang Wang
World models have demonstrated superiority in autonomous driving, particularly in the generation of multi-view driving videos. However, significant challenges still exist in generating customized driving videos. In this paper, we propose DriveDreamer-2, which builds upon the framework of DriveDreamer and incorporates a Large Language Model (LLM) to generate user-defined driving videos. Specifically, an LLM interface is initially incorporated to convert a user's query into agent trajectories. Subsequently, a HDMap, adhering to traffic regulations, is generated based on the trajectories. Ultimately, we propose the Unified Multi-View Model to enhance temporal and spatial coherence in the generated driving videos. DriveDreamer-2 is the first world model to generate customized driving videos, it can generate uncommon driving videos (e.g., vehicles abruptly cut in) in a user-friendly manner. Besides, experimental results demonstrate that the generated videos enhance the training of driving perception methods (e.g., 3D detection and tracking). Furthermore, video generation quality of DriveDreamer-2 surpasses other state-of-the-art methods, showcasing FID and FVD scores of 11.2 and 55.7, representing relative improvements of 30% and 50%.
Read more4/12/2024