A Platform-Agnostic Deep Reinforcement Learning Framework for Effective Sim2Real Transfer in Autonomous Driving
2304.08235
0
0
🤿
Abstract
Deep Reinforcement Learning (DRL) has shown remarkable success in solving complex tasks across various research fields. However, transferring DRL agents to the real world is still challenging due to the significant discrepancies between simulation and reality. To address this issue, we propose a robust DRL framework that leverages platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework facilitates the seamless transfer of the DRL agent to new simulated environments and the real world with minimal effort. We evaluate the performance of the agent in various driving scenarios in both simulation and the real world, and compare it to human players and the PID baseline in simulation. Our proposed framework significantly reduces the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world, driving the vehicle effectively.
Create account to get full access
Overview
- This paper proposes a robust Deep Reinforcement Learning (DRL) framework for teaching autonomous vehicles to drive in the real world.
- The key innovation is using platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation.
- This allows the trained agent to be seamlessly transferred to new simulated environments and the real world with minimal effort.
- The framework aims to reduce the gaps between different platforms and the Sim2Real gap, enabling the trained agent to achieve similar performance in both simulation and the real world.
Plain English Explanation
The paper presents a new way to train self-driving car AI using deep reinforcement learning. Normally, it's very difficult to take an AI trained in a simulated environment and make it work well in the real world, due to the differences between the two. This new framework tries to solve that problem.
The key idea is to use "platform-dependent perception modules" - essentially, AI models that are tailored to specific simulated or real-world environments. These modules extract the key information the self-driving car needs to navigate, like lane markings, other vehicles, obstacles, etc. By training the main driving agent on this extracted information, rather than raw sensor data, the agent can more easily transfer between different simulated environments and the real world.
The researchers tested this framework by training a self-driving car agent to perform lane-following and overtaking maneuvers. They found that the agent trained this way was able to drive just as well in the real world as it did in the various simulated environments. This represents a significant advance in Sim2Real transfer - the ability to take an AI trained in simulation and deploy it in the real world.
Technical Explanation
The paper proposes a robust DRL framework that uses platform-dependent perception modules to extract task-relevant information and train a lane-following and overtaking agent in simulation. This framework aims to facilitate the seamless transfer of the DRL agent to new simulated environments and the real world.
The key components of the framework are:
-
Perception Modules: These are AI models tailored to specific platforms (simulation, real-world sensors, etc.) that extract features like lane markings, other vehicles, obstacles, etc. from raw sensor data.
-
DRL Agent: This is the main driving agent, trained using deep reinforcement learning techniques like adaptive reinforcement learning to perform lane-following and overtaking maneuvers.
-
Transfer to New Environments: By training the DRL agent on the platform-dependent feature representations, rather than raw sensor data, the framework enables the agent to be transferred to new simulated environments and the real world with minimal effort.
The researchers evaluated the performance of the trained agent in various driving scenarios, both in simulation and the real world. They compared the agent's performance to human players and a PID baseline in simulation, and found that the agent achieved similar performance in both simulation and the real world.
Critical Analysis
The paper presents a promising approach to addressing the Sim2Real gap in autonomous driving, a long-standing challenge in the field of reinforcement learning for robotics.
One potential limitation is that the framework still relies on having accurate perception modules for each target platform. While this is likely easier than directly transferring a model trained on raw sensor data, it does require additional effort to develop and train these perception modules.
Additionally, the paper only evaluates the framework on a relatively narrow set of driving tasks (lane-following and overtaking). Further research would be needed to test its performance on a broader range of driving scenarios, such as advanced longitudinal control and collision avoidance.
It would also be interesting to see how the framework compares to other approaches for generating diverse driving data to improve Sim2Real transfer.
Conclusion
This paper presents a novel DRL framework that leverages platform-dependent perception modules to enable the seamless transfer of autonomous driving agents from simulation to the real world. By training the agents on extracted task-relevant features rather than raw sensor data, the framework significantly reduces the Sim2Real gap, allowing the agents to achieve similar performance in both environments.
This work represents an important step forward in the field of reinforcement learning for robotics, and could have significant implications for the development of reliable and safe self-driving car technologies.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🏅
Simulation-based reinforcement learning for real-world autonomous driving
B{l}a.zej Osi'nski, Adam Jakubowski, Piotr Mi{l}o's, Pawe{l} Zik{e}cina, Christopher Galias, Silviu Homoceanu, Henryk Michalewski
0
0
We use reinforcement learning in simulation to obtain a driving system controlling a full-size real-world vehicle. The driving policy takes RGB images from a single camera and their semantic segmentation as input. We use mostly synthetic data, with labelled real-world data appearing only in the training of the segmentation network. Using reinforcement learning in simulation and synthetic data is motivated by lowering costs and engineering effort. In real-world experiments we confirm that we achieved successful sim-to-real policy transfer. Based on the extensive evaluation, we analyze how design decisions about perception, control, and training impact the real-world performance.
4/4/2024

Sim-to-real Transfer of Deep Reinforcement Learning Agents for Online Coverage Path Planning
Arvi Jonnarth, Ola Johansson, Michael Felsberg
0
0
Sim-to-real transfer presents a difficult challenge, where models trained in simulation are to be deployed in the real world. The distribution shift between the two settings leads to biased representations of the perceived real-world environment, and thus to suboptimal predictions. In this work, we tackle the challenge of sim-to-real transfer of reinforcement learning (RL) agents for coverage path planning (CPP). In CPP, the task is for a robot to find a path that visits every point of a confined area. Specifically, we consider the case where the environment is unknown, and the agent needs to plan the path online while mapping the environment. We bridge the sim-to-real gap through a semi-virtual environment with a simulated sensor and obstacles, while including real robot kinematics and real-time aspects. We investigate what level of fine-tuning is needed for adapting to a realistic setting, comparing to an agent trained solely in simulation. We find that a high model inference frequency is sufficient for reducing the sim-to-real gap, while fine-tuning degrades performance initially. By training the model in simulation and deploying it at a high inference frequency, we transfer state-of-the-art results from simulation to the real domain, where direct learning would take in the order of weeks with manual interaction, i.e., would be completely infeasible.
6/10/2024
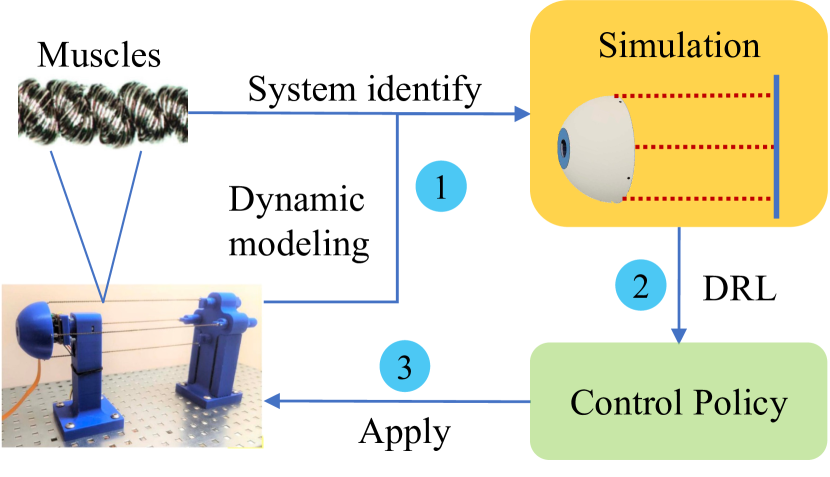
An Efficient Learning Control Framework With Sim-to-Real for String-Type Artificial Muscle-Driven Robotic Systems
Jiyue Tao, Yunsong Zhang, Sunil Kumar Rajendran, Feitian Zhang, Dexin Zhao, Tongsheng Shen
0
0
Robotic systems driven by artificial muscles present unique challenges due to the nonlinear dynamics of actuators and the complex designs of mechanical structures. Traditional model-based controllers often struggle to achieve desired control performance in such systems. Deep reinforcement learning (DRL), a trending machine learning technique widely adopted in robot control, offers a promising alternative. However, integrating DRL into these robotic systems faces significant challenges, including the requirement for large amounts of training data and the inevitable sim-to-real gap when deployed to real-world robots. This paper proposes an efficient reinforcement learning control framework with sim-to-real transfer to address these challenges. Bootstrap and augmentation enhancements are designed to improve the data efficiency of baseline DRL algorithms, while a sim-to-real transfer technique, namely randomization of muscle dynamics, is adopted to bridge the gap between simulation and real-world deployment. Extensive experiments and ablation studies are conducted utilizing two string-type artificial muscle-driven robotic systems including a two degree-of-freedom robotic eye and a parallel robotic wrist, the results of which demonstrate the effectiveness of the proposed learning control strategy.
6/10/2024

DrEureka: Language Model Guided Sim-To-Real Transfer
Yecheng Jason Ma, William Liang, Hung-Ju Wang, Sam Wang, Yuke Zhu, Linxi Fan, Osbert Bastani, Dinesh Jayaraman
0
0
Transferring policies learned in simulation to the real world is a promising strategy for acquiring robot skills at scale. However, sim-to-real approaches typically rely on manual design and tuning of the task reward function as well as the simulation physics parameters, rendering the process slow and human-labor intensive. In this paper, we investigate using Large Language Models (LLMs) to automate and accelerate sim-to-real design. Our LLM-guided sim-to-real approach, DrEureka, requires only the physics simulation for the target task and automatically constructs suitable reward functions and domain randomization distributions to support real-world transfer. We first demonstrate that our approach can discover sim-to-real configurations that are competitive with existing human-designed ones on quadruped locomotion and dexterous manipulation tasks. Then, we showcase that our approach is capable of solving novel robot tasks, such as quadruped balancing and walking atop a yoga ball, without iterative manual design.
6/5/2024