CATP: Context-Aware Trajectory Prediction with Competition Symbiosis

0

Sign in to get full access
Overview
- This paper presents a novel Context-Aware Trajectory Prediction (CATP) model that uses competition symbiosis to improve trajectory prediction accuracy.
- The model leverages contextual information, such as environmental cues and interaction between moving objects, to make more accurate predictions about future trajectories.
- The training algorithm utilizes an ensemble learning approach, where multiple prediction models compete and collaborate to achieve better overall performance.
Plain English Explanation
The goal of this research is to create a more accurate system for predicting the future paths that moving objects, like vehicles or pedestrians, will take. Current prediction models often struggle to account for all the contextual factors that influence how an object's trajectory will unfold, like the surrounding environment or how it interacts with other nearby objects.
The CATP model tackles this challenge by incorporating more of this contextual information into the prediction process. It learns to analyze things like the layout of the scene, the movements of nearby objects, and other relevant environmental cues. This allows it to make more informed guesses about where an object is likely to go next.
The key innovation is the training algorithm, which uses a competitive-collaborative approach. Multiple prediction models are trained in parallel, and they compete against each other to make the most accurate forecasts. But they also share information and learn from each other, which helps the overall system become more robust and reliable. This "competition symbiosis" allows the CATP model to outperform other state-of-the-art trajectory prediction techniques.
Technical Explanation
The CATP model uses a context-aware neural predictor as its core architecture, which takes in information about the current state of the scene (e.g. object positions, velocities, scene layout) and outputs predicted future trajectories. The model also leverages a spatial-social situation-aware transformer to capture interactions between moving objects.
The key innovation is the training algorithm, which employs competition symbiosis. Multiple instances of the CATP model are trained in parallel, and they compete against each other to make the most accurate trajectory predictions on a shared dataset. However, they also share information and learn from each other's mistakes, which helps improve the overall performance of the ensemble.
This competition symbiosis training process is designed to produce a more robust and generalizable model, as the individual predictors must learn to handle a diverse range of scenarios in order to outperform their competitors. The authors demonstrate that this approach leads to significant accuracy gains over other state-of-the-art context-sensitive transformer and cross-attention token pruning based trajectory prediction methods.
Critical Analysis
The CATP model represents a promising advancement in trajectory prediction, but there are a few potential limitations and areas for further exploration:
-
The reliance on detailed contextual information, such as scene layout and object interactions, may limit the model's applicability to settings where such data is not readily available. Exploring ways to learn effective trajectory predictions from more limited input could expand the model's real-world usefulness.
-
While the competition symbiosis training approach leads to performance gains, the authors do not provide a deep analysis of how this training dynamic affects the individual predictors within the ensemble. Further research into the emergent behaviors and specializations of the competing models could yield insights to guide future ensemble design.
-
The paper focuses on evaluating the CATP model on static datasets, but real-world trajectory prediction often involves continuous, dynamic environments. Assessing the model's performance and robustness in more realistic, time-varying scenarios would be an important next step.
Overall, the CATP model represents a compelling step forward in the field of context-aware trajectory prediction. The use of competition symbiosis to train a robust ensemble of predictors is a novel and promising approach that warrants further exploration and refinement.
Conclusion
The CATP model presented in this paper demonstrates how incorporating more contextual information, along with a novel competition symbiosis training algorithm, can lead to significant improvements in trajectory prediction accuracy. By leveraging environmental cues and the interactions between moving objects, the CATP model is able to make more informed forecasts about where a trajectory will go next.
The competitive-collaborative training process, where multiple prediction models compete against each other while also learning from one another, is a key innovation that helps the overall system become more robust and generalizable. This approach outperforms other state-of-the-art trajectory prediction techniques, suggesting that the CATP model could have valuable real-world applications in areas such as autonomous navigation, urban planning, and sports analytics.
While the CATP model shows promise, there are still opportunities to further refine and expand the approach, such as by exploring ways to operate with more limited contextual information or by evaluating performance in dynamic, real-world environments. Nonetheless, this research represents an important step forward in the field of context-aware trajectory prediction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CATP: Context-Aware Trajectory Prediction with Competition Symbiosis
Jiang Wu, Dongyu Liu, Yuchen Lin, Yingcai Wu
Contextual information is vital for accurate trajectory prediction. For instance, the intricate flying behavior of migratory birds hinges on their analysis of environmental cues such as wind direction and air pressure. However, the diverse and dynamic nature of contextual information renders it an arduous task for AI models to comprehend its impact on trajectories and consequently predict them accurately. To address this issue, we propose a ``manager-worker'' framework to unleash the full potential of contextual information and construct CATP model, an implementation of the framework for Context-Aware Trajectory Prediction. The framework comprises a manager model, several worker models, and a tailored training mechanism inspired by competition symbiosis in nature. Taking CATP as an example, each worker needs to compete against others for training data and develop an advantage in predicting specific moving patterns. The manager learns the workers' performance in different contexts and selects the best one in the given context to predict trajectories, enabling CATP as a whole to operate in a symbiotic manner. We conducted two comparative experiments and an ablation study to quantitatively evaluate the proposed framework and CATP model. The results showed that CATP could outperform SOTA models, and the framework could be generalized to different context-aware tasks.
Read more7/11/2024

0
CAPER: Enhancing Career Trajectory Prediction using Temporal Knowledge Graph and Ternary Relationship
Yeon-Chang Lee, JaeHyun Lee, Michiharu Yamashita, Dongwon Lee, Sang-Wook Kim
The problem of career trajectory prediction (CTP) aims to predict one's future employer or job position. While several CTP methods have been developed for this problem, we posit that none of these methods (1) jointly considers the mutual ternary dependency between three key units (i.e., user, position, and company) of a career and (2) captures the characteristic shifts of key units in career over time, leading to an inaccurate understanding of the job movement patterns in the labor market. To address the above challenges, we propose a novel solution, named as CAPER, that solves the challenges via sophisticated temporal knowledge graph (TKG) modeling. It enables the utilization of a graph-structured knowledge base with rich expressiveness, effectively preserving the changes in job movement patterns. Furthermore, we devise an extrapolated career reasoning task on TKG for a realistic evaluation. The experiments on a real-world career trajectory dataset demonstrate that CAPER consistently and significantly outperforms four baselines, two recent TKG reasoning methods, and five state-of-the-art CTP methods in predicting one's future companies and positions-i.e., on average, yielding 6.80% and 34.58% more accurate predictions, respectively.
Read more8/29/2024
0
Context-aware Multi-task Learning for Pedestrian Intent and Trajectory Prediction
Farzeen Munir, Tomasz Piotr Kucner
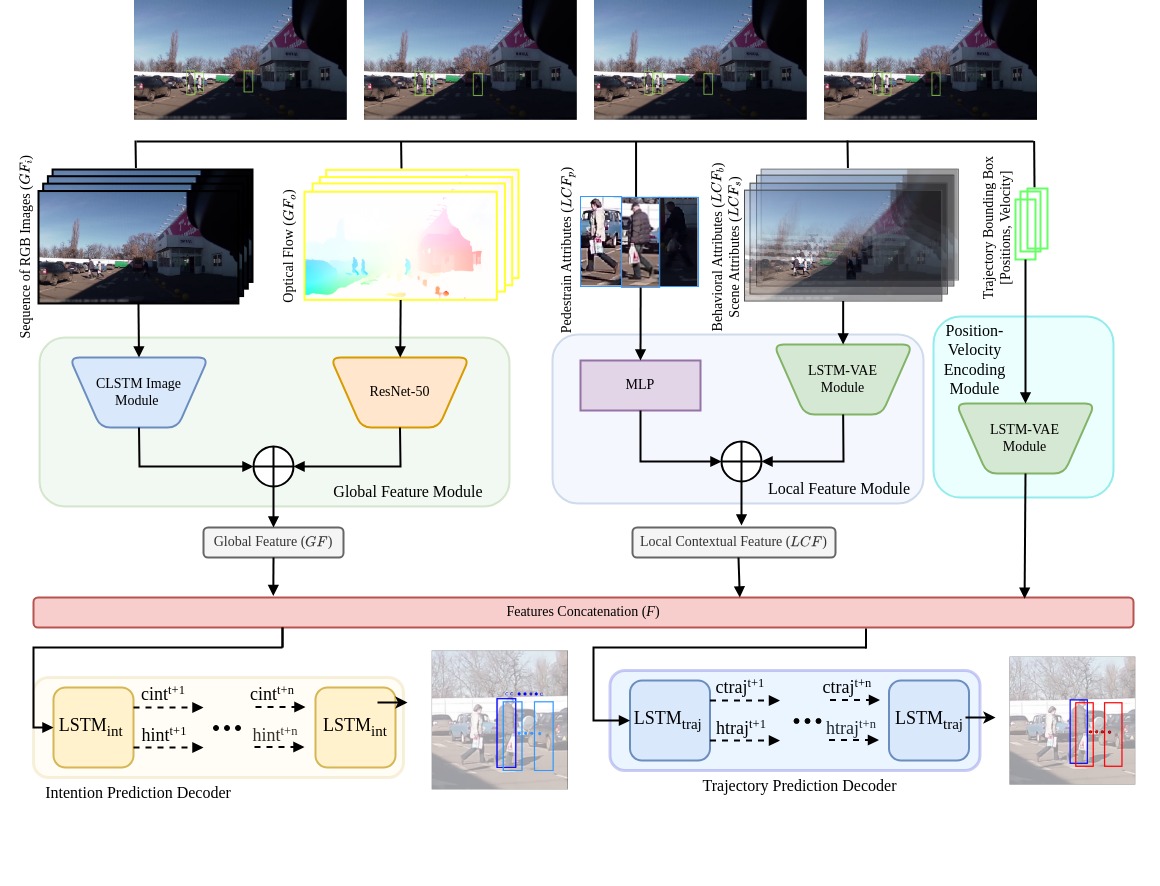
The advancement of socially-aware autonomous vehicles hinges on precise modeling of human behavior. Within this broad paradigm, the specific challenge lies in accurately predicting pedestrian's trajectory and intention. Traditional methodologies have leaned heavily on historical trajectory data, frequently overlooking vital contextual cues such as pedestrian-specific traits and environmental factors. Furthermore, there's a notable knowledge gap as trajectory and intention prediction have largely been approached as separate problems, despite their mutual dependence. To bridge this gap, we introduce PTINet (Pedestrian Trajectory and Intention Prediction Network), which jointly learns the trajectory and intention prediction by combining past trajectory observations, local contextual features (individual pedestrian behaviors), and global features (signs, markings etc.). The efficacy of our approach is evaluated on widely used public datasets: JAAD and PIE, where it has demonstrated superior performance over existing state-of-the-art models in trajectory and intention prediction. The results from our experiments and ablation studies robustly validate PTINet's effectiveness in jointly exploring intention and trajectory prediction for pedestrian behaviour modelling. The experimental evaluation indicates the advantage of using global and local contextual features for pedestrian trajectory and intention prediction. The effectiveness of PTINet in predicting pedestrian behavior paves the way for the development of automated systems capable of seamlessly interacting with pedestrians in urban settings.
Read more7/25/2024

0
TrACT: A Training Dynamics Aware Contrastive Learning Framework for Long-tail Trajectory Prediction
Junrui Zhang, Mozhgan Pourkeshavarz, Amir Rasouli
As a safety critical task, autonomous driving requires accurate predictions of road users' future trajectories for safe motion planning, particularly under challenging conditions. Yet, many recent deep learning methods suffer from a degraded performance on the challenging scenarios, mainly because these scenarios appear less frequently in the training data. To address such a long-tail issue, existing methods force challenging scenarios closer together in the feature space during training to trigger information sharing among them for more robust learning. These methods, however, primarily rely on the motion patterns to characterize scenarios, omitting more informative contextual information, such as interactions and scene layout. We argue that exploiting such information not only improves prediction accuracy but also scene compliance of the generated trajectories. In this paper, we propose to incorporate richer training dynamics information into a prototypical contrastive learning framework. More specifically, we propose a two-stage process. First, we generate rich contextual features using a baseline encoder-decoder framework. These features are split into clusters based on the model's output errors, using the training dynamics information, and a prototype is computed within each cluster. Second, we retrain the model using the prototypes in a contrastive learning framework. We conduct empirical evaluations of our approach using two large-scale naturalistic datasets and show that our method achieves state-of-the-art performance by improving accuracy and scene compliance on the long-tail samples. Furthermore, we perform experiments on a subset of the clusters to highlight the additional benefit of our approach in reducing training bias.
Read more5/1/2024