CBFKIT: A Control Barrier Function Toolbox for Robotics Applications

0

Sign in to get full access
Overview
- This paper introduces CBFkit, a control barrier function (CBF) toolbox for robotics applications.
- CBFs are a powerful tool for ensuring safe and reliable control of robotic systems, especially in dynamic environments.
- The CBFkit toolbox provides a comprehensive set of tools and algorithms for designing, analyzing, and implementing CBF-based controllers.
Plain English Explanation
The CBFkit: A Control Barrier Function Toolbox for Robotics Applications paper presents a software toolbox called CBFkit that helps researchers and engineers design and implement safe and reliable control systems for robots. Control barrier functions (CBFs) are a mathematical technique that can ensure a robot's actions keep it within safe operating boundaries, even in complex, constantly changing environments.
The CBFkit toolbox provides a wide range of tools and algorithms that make it easier to use CBFs in real-world robotic applications. It supports different types of robot models, control design problems, and CBF formulations. This allows developers to tailor the toolbox to their specific needs, whether they are controlling a car navigating city streets or a drone flying through a forest.
By using CBFkit, roboticists can create control systems that are guaranteed to keep the robot safe, even if unexpected obstacles or disturbances occur. This is an important capability, as robots are increasingly being used in dynamic, unstructured environments where safety is paramount. The toolbox aims to make it easier for researchers and engineers to leverage the power of CBFs to build more robust and reliable robotic systems.
Technical Explanation
The CBFkit: A Control Barrier Function Toolbox for Robotics Applications paper presents a comprehensive software toolbox called CBFkit that helps researchers and practitioners design, analyze, and implement control barrier function (CBF)-based controllers for a wide range of robotic applications.
The toolbox supports various robot models, including manipulators, mobile robots, and aerial vehicles, as well as different control design problems, such as trajectory tracking, stabilization, and obstacle avoidance. CBFkit provides implementations of different CBF formulations, including state-based CBFs, output-based CBFs, and robust adaptive CBFs.
The paper discusses the key features and capabilities of the CBFkit toolbox, including:
- Support for various robot models and control design problems
- Implementation of different CBF formulations and algorithms
- Tools for CBF design, analysis, and verification
- Integration with popular robotics frameworks, such as ROS and Gazebo
- Extensive documentation and examples for user guidance
The authors demonstrate the application of CBFkit through several case studies, covering tasks such as mobile robot navigation, manipulator control, and quadrotor flight. These examples showcase the toolbox's versatility and the benefits of using CBF-based control in terms of ensuring safe and reliable robot behavior, even in dynamic and uncertain environments.
Critical Analysis
The CBFkit: A Control Barrier Function Toolbox for Robotics Applications paper presents a comprehensive and well-designed toolbox for leveraging control barrier functions in robotic applications. The authors have clearly put a lot of thought and effort into making CBFkit a practical and user-friendly tool for researchers and engineers working in this field.
One of the key strengths of the toolbox is its broad support for different robot models and control design problems. This flexibility allows users to apply CBFkit to a wide range of robotic systems and tasks, which is an important consideration for the widespread adoption of the technology.
The paper also does a good job of highlighting the various CBF formulations supported by the toolbox, such as state-based CBFs, output-based CBFs, and robust adaptive CBFs. This breadth of support ensures that users can choose the CBF approach that best fits their specific requirements and constraints.
However, the paper does not delve into the potential limitations or challenges of the CBFkit toolbox. For example, it would be useful to know about the computational complexity and real-time performance of the toolbox, especially for resource-constrained robotic platforms. Additionally, the paper could have discussed the process of extending or customizing the toolbox to support new robot models or control design problems.
Overall, the CBFkit: A Control Barrier Function Toolbox for Robotics Applications paper provides a compelling introduction to a powerful and versatile tool for ensuring safe and reliable robot control. The toolbox's comprehensive features and support for a wide range of applications make it a valuable addition to the robotics research and development ecosystem.
Conclusion
The CBFkit: A Control Barrier Function Toolbox for Robotics Applications paper presents a significant contribution to the field of robotic control by introducing a comprehensive software toolbox that leverages the power of control barrier functions (CBFs). The CBFkit toolbox makes it easier for researchers and engineers to design, analyze, and implement CBF-based controllers for a variety of robotic systems and control design problems.
By providing a wide range of tools and algorithms for working with different CBF formulations, the toolbox helps to lower the barriers to entry for using this powerful technique in real-world robotic applications. The demonstrated case studies showcase the versatility and effectiveness of CBF-based control in ensuring safe and reliable robot behavior, even in dynamic and uncertain environments.
Overall, the CBFkit: A Control Barrier Function Toolbox for Robotics Applications paper represents an important advancement in the field of robotic control and safety, and the CBFkit toolbox is a valuable resource for the broader robotics community.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
CBFKIT: A Control Barrier Function Toolbox for Robotics Applications
Mitchell Black, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov
This paper introduces CBFKit, a Python/ROS toolbox for safe robotics planning and control under uncertainty. The toolbox provides a general framework for designing control barrier functions for mobility systems within both deterministic and stochastic environments. It can be connected to the ROS open-source robotics middleware, allowing for the setup of multi-robot applications, encoding of environments and maps, and integrations with predictive motion planning algorithms. Additionally, it offers multiple CBF variations and algorithms for robot control. The CBFKit is demonstrated on the Toyota Human Support Robot (HSR) in both simulation and in physical experiments.
Read more4/11/2024
0
Model Predictive Path Integral Methods with Reach-Avoid Tasks and Control Barrier Functions
Hardik Parwana, Mitchell Black, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov
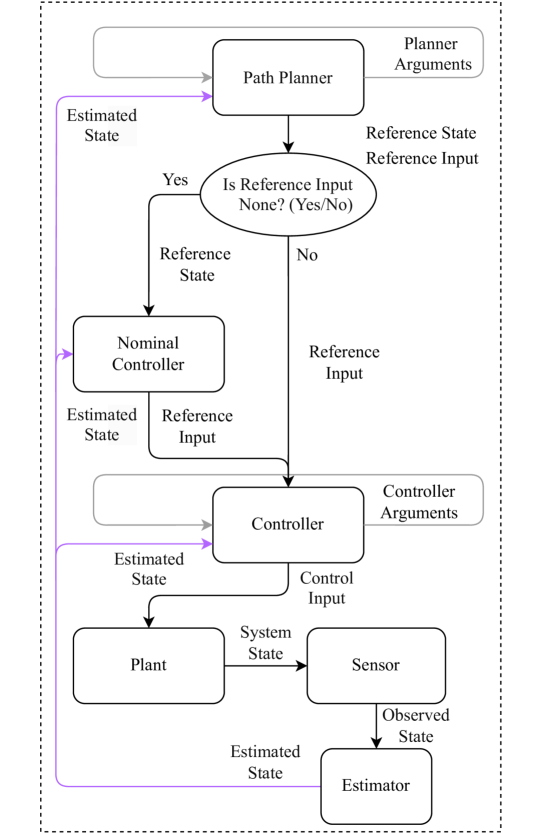
The rapid advancement of robotics necessitates robust tools for developing and testing safe control architectures in dynamic and uncertain environments. Ensuring safety and reliability in robotics, especially in safety-critical applications, is crucial, driving substantial industrial and academic efforts. In this context, we extend CBFkit, a Python/ROS2 toolbox, which now incorporates a planner using reach-avoid specifications as a cost function. This integration with the Model Predictive Path Integral (MPPI) controllers enables the toolbox to satisfy complex tasks while ensuring formal safety guarantees under various sources of uncertainty using Control Barrier Functions (CBFs). CBFkit is optimized for speed using JAX for automatic differentiation and jaxopt for quadratic program solving. The toolbox supports various robotic applications, including autonomous navigation, human-robot interaction, and multi-robot coordination. The toolbox also offers a comprehensive library of planner, controller, sensor, and estimator implementations. Through a series of examples, we demonstrate the enhanced capabilities of CBFkit in different robotic scenarios.
Read more7/19/2024

0
Neural Control Barrier Functions for Safe Navigation
Marvin Harms, Mihir Kulkarni, Nikhil Khedekar, Martin Jacquet, Kostas Alexis
Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and safety of the robot is crucial. This work relates to the synthesis of Control Barrier Functions (CBFs) through data for safe navigation in unknown environments. A novel methodology to jointly learn CBFs and corresponding safe controllers, in simulation, inspired by the State Dependent Riccati Equation (SDRE) is proposed. The CBF is used to obtain admissible commands from any nominal, possibly unsafe controller. An approach to apply the CBF inside a safety filter without the need for a consistent map or position estimate is developed. Subsequently, the resulting reactive safety filter is deployed on a multirotor platform integrating a LiDAR sensor both in simulation and real-world experiments.
Read more7/30/2024
⛏️
0
Resilient Estimator-based Control Barrier Functions for Dynamical Systems with Disturbances and Noise
Chuyuan Tao, Wenbin Wan, Junjie Gao, Bihao Mo, Hunmin Kim, Naira Hovakimyan
Control Barrier Function (CBF) is an emerging method that guarantees safety in path planning problems by generating a control command to ensure the forward invariance of a safety set. Most of the developments up to date assume availability of correct state measurements and absence of disturbances on the system. However, if the system incurs disturbances and is subject to noise, the CBF cannot guarantee safety due to the distorted state estimate. To improve the resilience and adaptability of the CBF, we propose a resilient estimator-based control barrier function (RE-CBF), which is based on a novel stochastic CBF optimization and resilient estimator, to guarantee the safety of systems with disturbances and noise in the path planning problems. The proposed algorithm uses the resilient estimation algorithm to estimate disturbances and counteract their effect using novel stochastic CBF optimization, providing safe control inputs for dynamical systems with disturbances and noise. To demonstrate the effectiveness of our algorithm in handling both noise and disturbances in dynamics and measurement, we design a quadrotor testing pipeline to simulate the proposed algorithm and then implement the algorithm on a real drone in our flying arena. Both simulations and real-world experiments show that the proposed method can guarantee safety for systems with disturbances and noise.
Read more7/2/2024