Model Predictive Path Integral Methods with Reach-Avoid Tasks and Control Barrier Functions

0
Sign in to get full access
Overview
- This paper presents a novel control framework for robotic systems that combines model predictive path integral (MPPI) methods and control barrier functions (CBFs) to solve reach-avoid tasks in dynamic environments.
- The proposed approach allows robots to navigate safely while reaching desired goal states, taking into account environmental constraints and system dynamics.
- Experiments on simulated systems demonstrate the effectiveness of the method in terms of safety, goal-reaching, and computational efficiency.
Plain English Explanation
The research paper describes a new way to control robotic systems that helps them navigate safely while also reaching specific target locations. This is important for robots operating in dynamic environments, where they need to avoid obstacles and other hazards while still accomplishing their goals.
The key idea is to combine two powerful control techniques: model predictive path integral (MPPI) methods and control barrier functions (CBFs). MPPI methods allow the robot to plan an optimal trajectory to reach its goal, while CBFs ensure that the robot's actions keep it within safe operating boundaries and avoid collisions.
By integrating these two approaches, the researchers have developed a control framework that enables robots to efficiently and safely navigate through complex, dynamic environments to reach their desired destinations. The method was tested in simulations, demonstrating its effectiveness at keeping the robot safe while still allowing it to successfully achieve its goals.
Technical Explanation
The paper presents a control framework that combines model predictive path integral (MPPI) methods and control barrier functions (CBFs) to solve reach-avoid tasks for robotic systems in dynamic environments.
MPPI is a powerful optimal control technique that can generate trajectories for a robot to reach a desired goal state, taking into account the system's dynamics and environmental constraints. CBFs, on the other hand, are a type of safety constraint that ensures the robot's actions keep it within a safe operating region, avoiding collisions and other hazards.
The researchers developed an integrated control approach that uses MPPI to plan an optimal trajectory to the goal, while also incorporating CBFs to maintain safety. This allows the robot to efficiently navigate through complex, dynamic environments while still reaching its desired destination.
Experiments were conducted on simulated systems to evaluate the performance of the proposed method. The results demonstrate that the combined MPPI-CBF framework can successfully solve reach-avoid tasks, keeping the robot safe while allowing it to reach its goal. The approach was also shown to be computationally efficient, making it suitable for real-time control applications.
Critical Analysis
The paper presents a promising approach for controlling robotic systems in dynamic environments, but there are a few potential limitations and areas for further research:
-
The experiments were conducted in simulation, so it will be important to validate the method's performance on real-world robotic platforms to ensure it can handle the complexities of physical systems.
-
The paper does not explore the scalability of the approach as the complexity of the environment or the number of obstacles increases. More extensive testing would be needed to understand the limits of the method's capabilities.
-
While the MPPI-CBF framework is computationally efficient, there may be opportunities to further optimize the control algorithm to improve its real-time performance, especially for larger-scale problems.
-
The paper does not address how the method might handle uncertainties in the robot's state or the environment, such as sensor noise or unexpected disturbances. Incorporating robust control techniques could enhance the framework's reliability and adaptability.
-
The researchers could explore extensions of the approach to handle more complex task specifications, such as multi-agent coordination or temporal logic constraints, to broaden the applicability of the method.
Overall, the paper presents a well-designed control framework that combines MPPI and CBFs to enable safe and efficient navigation of robotic systems in dynamic environments. Further research and real-world validation could help to refine and expand the capabilities of this promising approach.
Conclusion
This research paper introduces a novel control framework that integrates model predictive path integral (MPPI) methods and control barrier functions (CBFs) to solve reach-avoid tasks for robotic systems operating in dynamic environments. The proposed approach allows robots to plan optimal trajectories to reach desired goal states while ensuring safety and avoiding collisions, as demonstrated through simulations.
The key contribution of this work is the development of a control strategy that leverages the complementary strengths of MPPI and CBFs, enabling robots to efficiently navigate complex, changing surroundings while still accomplishing their objectives. This integration of optimal control and safety constraints represents an important step forward in the field of robotic navigation and could have significant implications for the deployment of autonomous systems in a wide range of real-world applications.
While the paper presents promising results, further research is needed to validate the method's performance in physical experiments and explore ways to enhance its scalability, robustness, and versatility. Nevertheless, this work represents a significant advancement in the development of safe and effective control strategies for robotic systems operating in dynamic environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Model Predictive Path Integral Methods with Reach-Avoid Tasks and Control Barrier Functions
Hardik Parwana, Mitchell Black, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov
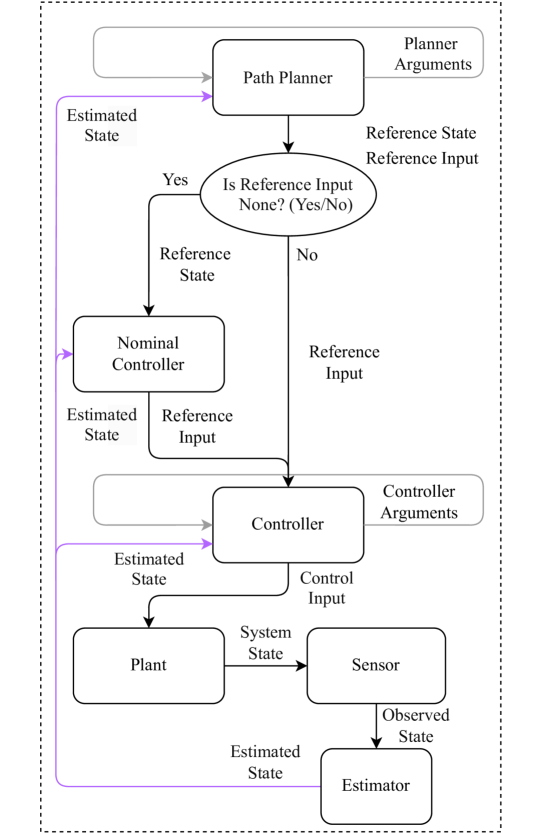
The rapid advancement of robotics necessitates robust tools for developing and testing safe control architectures in dynamic and uncertain environments. Ensuring safety and reliability in robotics, especially in safety-critical applications, is crucial, driving substantial industrial and academic efforts. In this context, we extend CBFkit, a Python/ROS2 toolbox, which now incorporates a planner using reach-avoid specifications as a cost function. This integration with the Model Predictive Path Integral (MPPI) controllers enables the toolbox to satisfy complex tasks while ensuring formal safety guarantees under various sources of uncertainty using Control Barrier Functions (CBFs). CBFkit is optimized for speed using JAX for automatic differentiation and jaxopt for quadratic program solving. The toolbox supports various robotic applications, including autonomous navigation, human-robot interaction, and multi-robot coordination. The toolbox also offers a comprehensive library of planner, controller, sensor, and estimator implementations. Through a series of examples, we demonstrate the enhanced capabilities of CBFkit in different robotic scenarios.
Read more7/19/2024

0
CBFKIT: A Control Barrier Function Toolbox for Robotics Applications
Mitchell Black, Georgios Fainekos, Bardh Hoxha, Hideki Okamoto, Danil Prokhorov
This paper introduces CBFKit, a Python/ROS toolbox for safe robotics planning and control under uncertainty. The toolbox provides a general framework for designing control barrier functions for mobility systems within both deterministic and stochastic environments. It can be connected to the ROS open-source robotics middleware, allowing for the setup of multi-robot applications, encoding of environments and maps, and integrations with predictive motion planning algorithms. Additionally, it offers multiple CBF variations and algorithms for robot control. The CBFKit is demonstrated on the Toyota Human Support Robot (HSR) in both simulation and in physical experiments.
Read more4/11/2024
0
Robot Safe Planning In Dynamic Environments Based On Model Predictive Control Using Control Barrier Function
Zetao Lu, Kaijun Feng, Jun Xu, Haoyao Chen, Yunjiang Lou
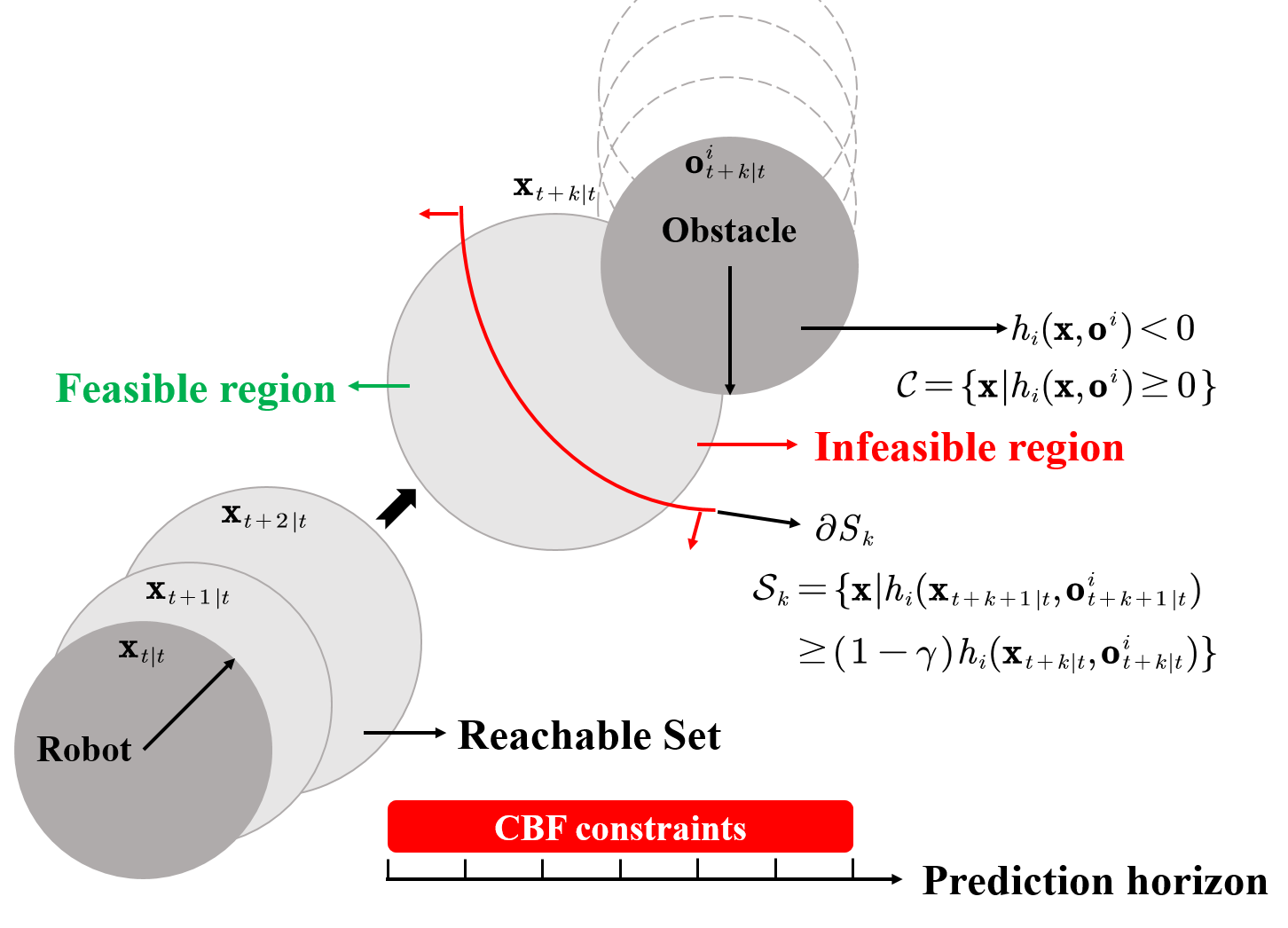
Implementing obstacle avoidance in dynamic environments is a challenging problem for robots. Model predictive control (MPC) is a popular strategy for dealing with this type of problem, and recent work mainly uses control barrier function (CBF) as hard constraints to ensure that the system state remains in the safe set. However, in crowded scenarios, effective solutions may not be obtained due to infeasibility problems, resulting in degraded controller performance. We propose a new MPC framework that integrates CBF to tackle the issue of obstacle avoidance in dynamic environments, in which the infeasibility problem induced by hard constraints operating over the whole prediction horizon is solved by softening the constraints and introducing exact penalty, prompting the robot to actively seek out new paths. At the same time, generalized CBF is extended as a single-step safety constraint of the controller to enhance the safety of the robot during navigation. The efficacy of the proposed method is first shown through simulation experiments, in which a double-integrator system and a unicycle system are employed, and the proposed method outperforms other controllers in terms of safety, feasibility, and navigation efficiency. Furthermore, real-world experiment on an MR1000 robot is implemented to demonstrate the effectiveness of the proposed method.
Read more4/10/2024

0
Neural Control Barrier Functions for Safe Navigation
Marvin Harms, Mihir Kulkarni, Nikhil Khedekar, Martin Jacquet, Kostas Alexis
Autonomous robot navigation can be particularly demanding, especially when the surrounding environment is not known and safety of the robot is crucial. This work relates to the synthesis of Control Barrier Functions (CBFs) through data for safe navigation in unknown environments. A novel methodology to jointly learn CBFs and corresponding safe controllers, in simulation, inspired by the State Dependent Riccati Equation (SDRE) is proposed. The CBF is used to obtain admissible commands from any nominal, possibly unsafe controller. An approach to apply the CBF inside a safety filter without the need for a consistent map or position estimate is developed. Subsequently, the resulting reactive safety filter is deployed on a multirotor platform integrating a LiDAR sensor both in simulation and real-world experiments.
Read more7/30/2024