A Certifiable Algorithm for Simultaneous Shape Estimation and Object Tracking

0

Sign in to get full access
Overview
- This paper presents a certifiable algorithm for simultaneously estimating the shape of an object and tracking its motion in a dynamic environment.
- The algorithm is able to robustly handle unknown object shapes, occlusions, and multiple objects moving independently.
- The approach combines several techniques, including object-centric reconstruction and tracking, simultaneous 3D object detection and pose estimation, and 3D flow optimization.
- The algorithm is evaluated on both synthetic and real-world datasets, demonstrating its effectiveness in challenging tracking scenarios.
Plain English Explanation
The paper describes a new computer vision algorithm that can accurately track the motion of objects and estimate their 3D shapes, even in complex and cluttered scenes. Rather than just following the location of an object over time, this approach can also figure out the exact size and form of the object as it moves around.
This is a challenging problem because objects can be occluded by other things in the scene, and their shapes may be completely unknown to the algorithm at the start. The key innovation is combining several advanced techniques, like object-centric reconstruction, simultaneous 3D detection and pose estimation, and 3D flow optimization, to robustly handle these challenges.
The algorithm was tested on both artificial and real-world datasets, showing that it can effectively track the motion and shape of objects in cluttered, dynamic environments. This could have important applications in areas like autonomous driving, robotics, and augmented reality, where understanding the 3D structure of a scene is crucial.
Technical Explanation
The key contribution of this paper is a certifiable algorithm for simultaneous shape estimation and object tracking in dynamic environments. The approach combines several recent advances in computer vision, including object-centric reconstruction and tracking, simultaneous 3D object detection and pose estimation, and 3D flow optimization.
The algorithm is designed to handle unknown object shapes, occlusions, and multiple independently moving objects. It formulates the problem as a joint optimization over the object shapes, their 3D poses, and the 3D motion field of the scene. This optimization is performed in a certifiable manner, meaning the algorithm is guaranteed to converge to a globally optimal solution under certain conditions.
The method is evaluated on both synthetic and real-world datasets, demonstrating strong performance in challenging tracking scenarios. For example, the algorithm is able to accurately recover the 3D shapes and motions of objects even when they are partially occluded by other elements in the scene.
Critical Analysis
The proposed algorithm represents an impressive advance in the field of 3D object tracking and reconstruction. By combining multiple state-of-the-art techniques, the authors have developed a highly capable system that can handle a variety of challenging real-world situations.
One potential limitation of the approach is its reliance on a robust 3D multi-object tracking module to initialize the object poses. If this module performs poorly, it could negatively impact the overall accuracy of the system. Additionally, the certifiability guarantee provided by the algorithm may come at the cost of increased computational complexity, which could limit its applicability in real-time scenarios.
It would also be valuable to see how the algorithm performs on a broader range of object types and scene configurations, as the evaluation in the paper is somewhat limited. Exploring the generalization capabilities of the approach could reveal additional strengths or weaknesses.
Overall, this paper presents a compelling and technically sound solution to the problem of simultaneous shape estimation and object tracking. With further refinement and validation, the techniques described here could have significant impact in a variety of computer vision and robotics applications.
Conclusion
This paper introduces a certifiable algorithm for the challenging problem of simultaneously estimating the 3D shapes and motions of objects in a dynamic environment. By integrating several state-of-the-art computer vision techniques, the proposed method is able to handle unknown object shapes, occlusions, and multiple independently moving objects.
The algorithm's ability to robustly track objects and recover their 3D structures could have important applications in areas like autonomous driving, robotics, and augmented reality, where understanding the 3D structure of a scene is crucial. While the approach has some potential limitations, the authors have made a significant contribution to the field of 3D object tracking and reconstruction.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
A Certifiable Algorithm for Simultaneous Shape Estimation and Object Tracking
Lorenzo Shaikewitz, Samuel Ubellacker, Luca Carlone
Applications from manipulation to autonomous vehicles rely on robust and general object tracking to safely perform tasks in dynamic environments. We propose the first certifiably optimal category-level approach for simultaneous shape estimation and pose tracking of an object of known category (e.g. a car). Our approach uses 3D semantic keypoint measurements extracted from an RGB-D image sequence, and phrases the estimation as a fixed-lag smoothing problem. Temporal constraints enforce the object's rigidity (fixed shape) and smooth motion according to a constant-twist motion model. The solutions to this problem are the estimates of the object's state (poses, velocities) and shape (paramaterized according to the active shape model) over the smoothing horizon. Our key contribution is to show that despite the non-convexity of the fixed-lag smoothing problem, we can solve it to certifiable optimality using a small-size semidefinite relaxation. We also present a fast outlier rejection scheme that filters out incorrect keypoint detections with shape and time compatibility tests, and wrap our certifiable solver in a graduated non-convexity scheme. We evaluate the proposed approach on synthetic and real data, showcasing its performance in a table-top manipulation scenario and a drone-based vehicle tracking application.
Read more7/25/2024
0
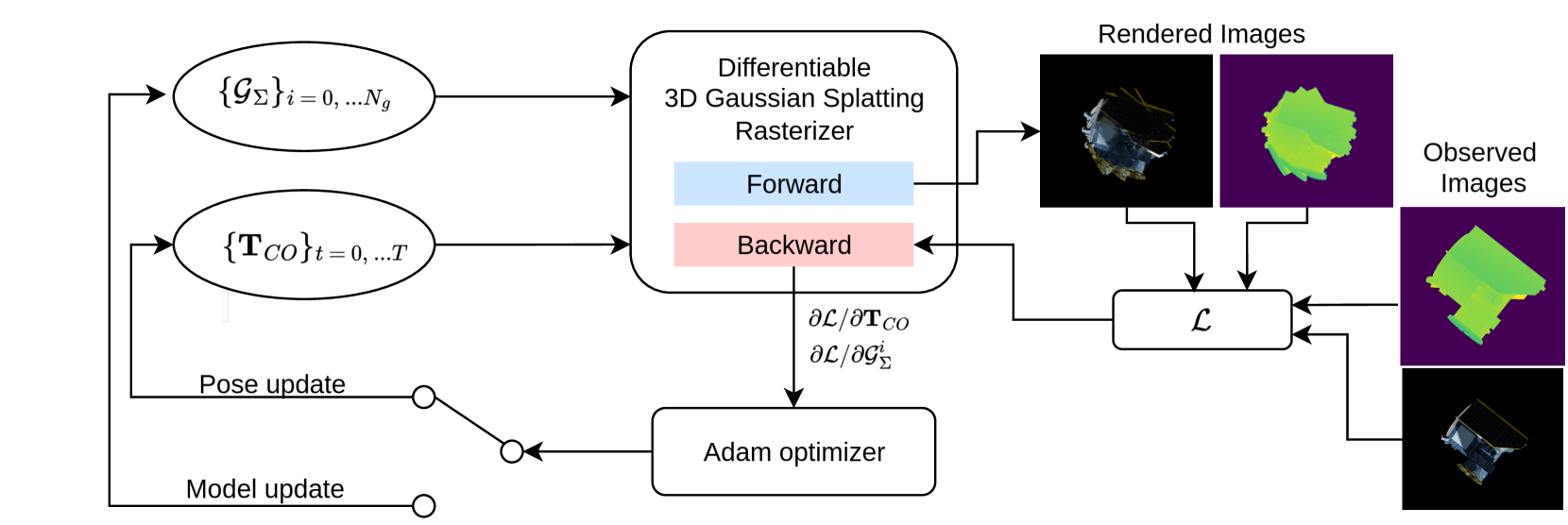
Object-centric Reconstruction and Tracking of Dynamic Unknown Objects using 3D Gaussian Splatting
Kuldeep R Barad, Antoine Richard, Jan Dentler, Miguel Olivares-Mendez, Carol Martinez
Generalizable perception is one of the pillars of high-level autonomy in space robotics. Estimating the structure and motion of unknown objects in dynamic environments is fundamental for such autonomous systems. Traditionally, the solutions have relied on prior knowledge of target objects, multiple disparate representations, or low-fidelity outputs unsuitable for robotic operations. This work proposes a novel approach to incrementally reconstruct and track a dynamic unknown object using a unified representation -- a set of 3D Gaussian blobs that describe its geometry and appearance. The differentiable 3D Gaussian Splatting framework is adapted to a dynamic object-centric setting. The input to the pipeline is a sequential set of RGB-D images. 3D reconstruction and 6-DoF pose tracking tasks are tackled using first-order gradient-based optimization. The formulation is simple, requires no pre-training, assumes no prior knowledge of the object or its motion, and is suitable for online applications. The proposed approach is validated on a dataset of 10 unknown spacecraft of diverse geometry and texture under arbitrary relative motion. The experiments demonstrate successful 3D reconstruction and accurate 6-DoF tracking of the target object in proximity operations over a short to medium duration. The causes of tracking drift are discussed and potential solutions are outlined.
Read more9/20/2024

0
Certifying Robustness of Learning-Based Keypoint Detection and Pose Estimation Methods
Xusheng Luo, Tianhao Wei, Simin Liu, Ziwei Wang, Luis Mattei-Mendez, Taylor Loper, Joshua Neighbor, Casidhe Hutchison, Changliu Liu
This work addresses the certification of the local robustness of vision-based two-stage 6D object pose estimation. The two-stage method for object pose estimation achieves superior accuracy by first employing deep neural network-driven keypoint regression and then applying a Perspective-n-Point (PnP) technique. Despite advancements, the certification of these methods' robustness remains scarce. This research aims to fill this gap with a focus on their local robustness on the system level--the capacity to maintain robust estimations amidst semantic input perturbations. The core idea is to transform the certification of local robustness into neural network verification for classification tasks. The challenge is to develop model, input, and output specifications that align with off-the-shelf verification tools. To facilitate verification, we modify the keypoint detection model by substituting nonlinear operations with those more amenable to the verification processes. Instead of injecting random noise into images, as is common, we employ a convex hull representation of images as input specifications to more accurately depict semantic perturbations. Furthermore, by conducting a sensitivity analysis, we propagate the robustness criteria from pose to keypoint accuracy, and then formulating an optimal error threshold allocation problem that allows for the setting of a maximally permissible keypoint deviation thresholds. Viewing each pixel as an individual class, these thresholds result in linear, classification-akin output specifications. Under certain conditions, we demonstrate that the main components of our certification framework are both sound and complete, and validate its effects through extensive evaluations on realistic perturbations. To our knowledge, this is the first study to certify the robustness of large-scale, keypoint-based pose estimation given images in real-world scenarios.
Read more8/2/2024
🛸
0
One Point, One Object: Simultaneous 3D Object Segmentation and 6-DOF Pose Estimation
Hongsen Liu
We propose a single-shot method for simultaneous 3D object segmentation and 6-DOF pose estimation in pure 3D point clouds scenes based on a consensus that emph{one point only belongs to one object}, i.e., each point has the potential power to predict the 6-DOF pose of its corresponding object. Unlike the recently proposed methods of the similar task, which rely on 2D detectors to predict the projection of 3D corners of the 3D bounding boxes and the 6-DOF pose must be estimated by a PnP like spatial transformation method, ours is concise enough not to require additional spatial transformation between different dimensions. Due to the lack of training data for many objects, the recently proposed 2D detection methods try to generate training data by using rendering engine and achieve good results. However, rendering in 3D space along with 6-DOF is relatively difficult. Therefore, we propose an augmented reality technology to generate the training data in semi-virtual reality 3D space. The key component of our method is a multi-task CNN architecture that can simultaneously predicts the 3D object segmentation and 6-DOF pose estimation in pure 3D point clouds. For experimental evaluation, we generate expanded training data for two state-of-the-arts 3D object datasets cite{PLCHF}cite{TLINEMOD} by using Augmented Reality technology (AR). We evaluate our proposed method on the two datasets. The results show that our method can be well generalized into multiple scenarios and provide performance comparable to or better than the state-of-the-arts.
Read more6/7/2024