Certifying Robustness of Learning-Based Keypoint Detection and Pose Estimation Methods

0

Sign in to get full access
Overview
- Certifying robustness of learning-based keypoint detection and pose estimation methods
- Ensuring accuracy and reliability of AI systems in safety-critical applications
- Developing techniques to formally verify and quantify robustness of neural networks
Plain English Explanation
This paper discusses a novel approach to certifying the robustness of neural networks used for keypoint detection and pose estimation. As AI systems are increasingly deployed in safety-critical applications like autonomous vehicles and robotics, it is crucial to ensure their accuracy and reliability, even when faced with perturbations or adversarial attacks.
The researchers present a framework that can formally verify the robustness of neural networks, quantifying their ability to maintain performance in the presence of small, imperceptible changes to the input. This allows developers to rigorously assess the reliability of these AI models and identify potential vulnerabilities before deploying them in the real world.
By benchmarking the robustness of keypoint detection and pose estimation systems, the researchers aim to improve the overall robustness of these critical AI capabilities, enhancing their suitability for safety-critical applications.
Technical Explanation
The paper introduces a framework for certifying the robustness of neural networks used for keypoint detection and pose estimation. The key components of this approach include:
-
Robustness Verification: The researchers develop a novel algorithm that can formally verify the robustness of a neural network, quantifying its ability to maintain accurate predictions even when the input is perturbed by small, imperceptible changes.
-
Benchmarking Robustness: The team applies this robustness verification technique to evaluate the performance of state-of-the-art keypoint detection and pose estimation models under various types of perturbations, such as additive noise, occlusions, and adversarial attacks.
-
Robustness-Aware Training: Building on the insights from the robustness benchmarking, the researchers explore techniques to train more robust neural networks, enhancing their reliability and suitability for safety-critical applications.
The results demonstrate that the proposed framework can effectively quantify the robustness of these AI models, identifying vulnerabilities and guiding the development of more reliable systems. By rigorously assessing and improving the robustness of keypoint detection and pose estimation methods, the researchers aim to advance the state of the art and enable their safe deployment in real-world applications.
Critical Analysis
The paper presents a comprehensive approach to certifying the robustness of neural networks used for keypoint detection and pose estimation, which is a crucial step in ensuring the reliability and safety of these AI systems. The researchers' focus on formally verifying robustness, rather than just empirically evaluating performance, is a valuable contribution to the field.
However, the proposed framework is computationally expensive, which may limit its practical applicability for large-scale or time-sensitive deployments. Additionally, the researchers acknowledge that their approach primarily considers small, imperceptible perturbations and may not capture the full range of real-world challenges that these AI systems may face.
Further research is needed to explore more efficient robustness verification techniques and to expand the understanding of neural network vulnerabilities in the context of complex, real-world scenarios. Ongoing benchmarking efforts and robustness-focused training will be crucial in driving the development of truly reliable and safe AI-powered keypoint detection and pose estimation systems.
Conclusion
This paper presents a significant step forward in the quest to certify the robustness of learning-based keypoint detection and pose estimation methods. By developing a framework that can formally verify the ability of these AI systems to maintain accuracy in the face of perturbations, the researchers have laid the groundwork for enhancing the reliability and safety of critical applications, such as autonomous vehicles and robotics.
As AI continues to play an increasingly crucial role in safety-critical domains, the need for rigorous robustness assurance will only grow. The insights and techniques presented in this paper represent a valuable contribution to this ongoing effort, paving the way for the development of more robust and trustworthy AI-powered perception and estimation capabilities.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Certifying Robustness of Learning-Based Keypoint Detection and Pose Estimation Methods
Xusheng Luo, Tianhao Wei, Simin Liu, Ziwei Wang, Luis Mattei-Mendez, Taylor Loper, Joshua Neighbor, Casidhe Hutchison, Changliu Liu
This work addresses the certification of the local robustness of vision-based two-stage 6D object pose estimation. The two-stage method for object pose estimation achieves superior accuracy by first employing deep neural network-driven keypoint regression and then applying a Perspective-n-Point (PnP) technique. Despite advancements, the certification of these methods' robustness remains scarce. This research aims to fill this gap with a focus on their local robustness on the system level--the capacity to maintain robust estimations amidst semantic input perturbations. The core idea is to transform the certification of local robustness into neural network verification for classification tasks. The challenge is to develop model, input, and output specifications that align with off-the-shelf verification tools. To facilitate verification, we modify the keypoint detection model by substituting nonlinear operations with those more amenable to the verification processes. Instead of injecting random noise into images, as is common, we employ a convex hull representation of images as input specifications to more accurately depict semantic perturbations. Furthermore, by conducting a sensitivity analysis, we propagate the robustness criteria from pose to keypoint accuracy, and then formulating an optimal error threshold allocation problem that allows for the setting of a maximally permissible keypoint deviation thresholds. Viewing each pixel as an individual class, these thresholds result in linear, classification-akin output specifications. Under certain conditions, we demonstrate that the main components of our certification framework are both sound and complete, and validate its effects through extensive evaluations on realistic perturbations. To our knowledge, this is the first study to certify the robustness of large-scale, keypoint-based pose estimation given images in real-world scenarios.
Read more8/2/2024
0
PoseBench: Benchmarking the Robustness of Pose Estimation Models under Corruptions
Sihan Ma, Jing Zhang, Qiong Cao, Dacheng Tao
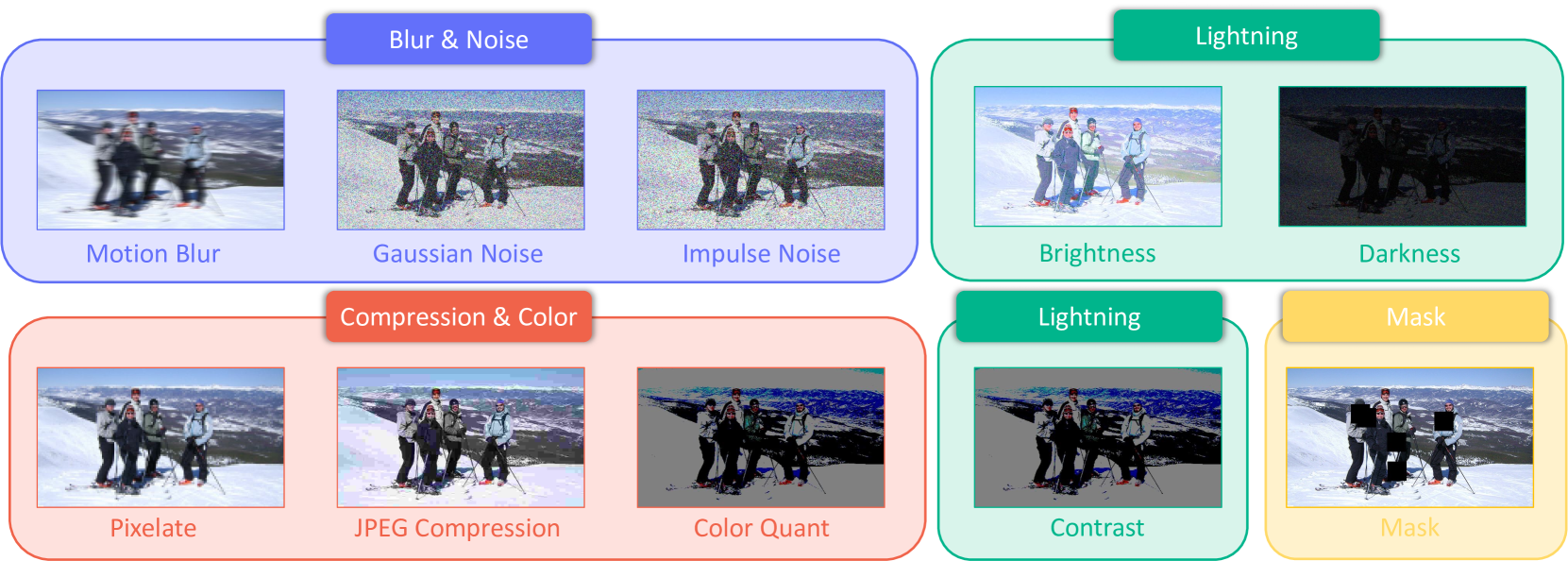
Pose estimation aims to accurately identify anatomical keypoints in humans and animals using monocular images, which is crucial for various applications such as human-machine interaction, embodied AI, and autonomous driving. While current models show promising results, they are typically trained and tested on clean data, potentially overlooking the corruption during real-world deployment and thus posing safety risks in practical scenarios. To address this issue, we introduce PoseBench, a comprehensive benchmark designed to evaluate the robustness of pose estimation models against real-world corruption. We evaluated 60 representative models, including top-down, bottom-up, heatmap-based, regression-based, and classification-based methods, across three datasets for human and animal pose estimation. Our evaluation involves 10 types of corruption in four categories: 1) blur and noise, 2) compression and color loss, 3) severe lighting, and 4) masks. Our findings reveal that state-of-the-art models are vulnerable to common real-world corruptions and exhibit distinct behaviors when tackling human and animal pose estimation tasks. To improve model robustness, we delve into various design considerations, including input resolution, pre-training datasets, backbone capacity, post-processing, and data augmentations. We hope that our benchmark will serve as a foundation for advancing research in robust pose estimation. The benchmark and source code will be released at https://xymsh.github.io/PoseBench
Read more9/17/2024
🤿
0
Deep Learning-Based Object Pose Estimation: A Comprehensive Survey
Jian Liu, Wei Sun, Hui Yang, Zhiwen Zeng, Chongpei Liu, Jin Zheng, Xingyu Liu, Hossein Rahmani, Nicu Sebe, Ajmal Mian
Object pose estimation is a fundamental computer vision problem with broad applications in augmented reality and robotics. Over the past decade, deep learning models, due to their superior accuracy and robustness, have increasingly supplanted conventional algorithms reliant on engineered point pair features. Nevertheless, several challenges persist in contemporary methods, including their dependency on labeled training data, model compactness, robustness under challenging conditions, and their ability to generalize to novel unseen objects. A recent survey discussing the progress made on different aspects of this area, outstanding challenges, and promising future directions, is missing. To fill this gap, we discuss the recent advances in deep learning-based object pose estimation, covering all three formulations of the problem, emph{i.e.}, instance-level, category-level, and unseen object pose estimation. Our survey also covers multiple input data modalities, degrees-of-freedom of output poses, object properties, and downstream tasks, providing the readers with a holistic understanding of this field. Additionally, it discusses training paradigms of different domains, inference modes, application areas, evaluation metrics, and benchmark datasets, as well as reports the performance of current state-of-the-art methods on these benchmarks, thereby facilitating the readers in selecting the most suitable method for their application. Finally, the survey identifies key challenges, reviews the prevailing trends along with their pros and cons, and identifies promising directions for future research. We also keep tracing the latest works at https://github.com/CNJianLiu/Awesome-Object-Pose-Estimation.
Read more6/3/2024
🔍
0
Improving the Robustness of 3D Human Pose Estimation: A Benchmark and Learning from Noisy Input
Trung-Hieu Hoang, Mona Zehni, Huy Phan, Duc Minh Vo, Minh N. Do
Despite the promising performance of current 3D human pose estimation techniques, understanding and enhancing their generalization on challenging in-the-wild videos remain an open problem. In this work, we focus on the robustness of 2D-to-3D pose lifters. To this end, we develop two benchmark datasets, namely Human3.6M-C and HumanEva-I-C, to examine the robustness of video-based 3D pose lifters to a wide range of common video corruptions including temporary occlusion, motion blur, and pixel-level noise. We observe the poor generalization of state-of-the-art 3D pose lifters in the presence of corruption and establish two techniques to tackle this issue. First, we introduce Temporal Additive Gaussian Noise (TAGN) as a simple yet effective 2D input pose data augmentation. Additionally, to incorporate the confidence scores output by the 2D pose detectors, we design a confidence-aware convolution (CA-Conv) block. Extensively tested on corrupted videos, the proposed strategies consistently boost the robustness of 3D pose lifters and serve as new baselines for future research.
Read more4/17/2024