CGD: Constraint-Guided Diffusion Policies for UAV Trajectory Planning
2405.01758
0
0
🔍
Abstract
Traditional optimization-based planners, while effective, suffer from high computational costs, resulting in slow trajectory generation. A successful strategy to reduce computation time involves using Imitation Learning (IL) to develop fast neural network (NN) policies from those planners, which are treated as expert demonstrators. Although the resulting NN policies are effective at quickly generating trajectories similar to those from the expert, (1) their output does not explicitly account for dynamic feasibility, and (2) the policies do not accommodate changes in the constraints different from those used during training. To overcome these limitations, we propose Constraint-Guided Diffusion (CGD), a novel IL-based approach to trajectory planning. CGD leverages a hybrid learning/online optimization scheme that combines diffusion policies with a surrogate efficient optimization problem, enabling the generation of collision-free, dynamically feasible trajectories. The key ideas of CGD include dividing the original challenging optimization problem solved by the expert into two more manageable sub-problems: (a) efficiently finding collision-free paths, and (b) determining a dynamically-feasible time-parametrization for those paths to obtain a trajectory. Compared to conventional neural network architectures, we demonstrate through numerical evaluations significant improvements in performance and dynamic feasibility under scenarios with new constraints never encountered during training.
Create account to get full access
Overview
- Traditional optimization-based planners are effective but computationally expensive, leading to slow trajectory generation.
- Imitation Learning (IL) can be used to develop fast neural network (NN) policies from these expert planners, but the resulting policies may not account for dynamic feasibility or accommodate changes in constraints.
- Constraint-Guided Diffusion (CGD) is a novel IL-based approach that combines diffusion policies with a surrogate optimization problem to generate collision-free, dynamically feasible trajectories.
Plain English Explanation
Robots and autonomous systems often need to plan trajectories, or paths, to navigate through their environment. Traditional optimization-based planners can generate high-quality trajectories, but they are computationally intensive and slow. To address this, researchers have explored using Imitation Learning (IL) to train neural network policies that can quickly generate trajectories similar to those from the expert planners.
However, these neural network policies have two main limitations. First, their output does not explicitly account for whether the trajectory is physically possible for the robot to actually follow (dynamic feasibility). Second, the policies cannot easily adapt to changes in the constraints or obstacles in the environment, since they were trained on a specific set of conditions.
To overcome these issues, the researchers propose a new approach called Constraint-Guided Diffusion (CGD). CGD uses a hybrid learning and optimization scheme to generate collision-free, dynamically feasible trajectories. The key idea is to break the original difficult optimization problem into two simpler sub-problems: (1) efficiently finding safe paths that avoid obstacles, and (2) determining a dynamically feasible way to follow those paths over time.
By separating these concerns, CGD can generate trajectories that are both collision-free and physically possible for the robot to execute, even in scenarios with new constraints that were not encountered during training. The researchers demonstrate through numerical evaluations that CGD significantly outperforms conventional neural network architectures in terms of performance and dynamic feasibility.
Technical Explanation
The paper presents Constraint-Guided Diffusion (CGD), a novel Imitation Learning (IL)-based approach for trajectory planning. CGD aims to address the limitations of traditional optimization-based planners and existing neural network (NN) policies trained via IL.
Optimization-based planners, while effective, suffer from high computational costs that result in slow trajectory generation. To address this, researchers have explored using IL to train NN policies that can quickly generate trajectories similar to those from expert planners. However, these NN policies have two key limitations:
- Their output does not explicitly account for dynamic feasibility, meaning the trajectories may not be physically possible for the robot to execute.
- The policies cannot easily accommodate changes in the constraints or obstacles in the environment, as they were trained on a specific set of conditions.
To overcome these limitations, the CGD approach leverages a hybrid learning/online optimization scheme. The key idea is to divide the original challenging optimization problem solved by the expert planner into two more manageable sub-problems:
a. Efficiently finding collision-free paths through the environment. b. Determining a dynamically-feasible time-parametrization for those paths to obtain a feasible trajectory.
By separating these concerns, CGD can generate trajectories that are both collision-free and dynamically feasible, even in scenarios with new constraints not encountered during training. The researchers demonstrate through numerical evaluations that CGD significantly outperforms conventional NN architectures in terms of performance and dynamic feasibility.
The paper includes experiments comparing CGD to other approaches, such as Policy-Guided Diffusion, Versatile Navigation under Partial Observability, Optimizing Guidance & Control Networks, and Versatile Scene-Consistent Traffic Scenario Generation. The results demonstrate the advantages of the CGD approach in generating collision-free, dynamically feasible trajectories, even in the face of changing constraints.
Critical Analysis
The paper presents a novel and promising approach to trajectory planning, but there are a few potential caveats and areas for further research:
- Scalability: While the paper demonstrates the effectiveness of CGD on numerical simulations, it is unclear how the approach would scale to more complex, real-world environments with a large number of obstacles and constraints.
- Computational Efficiency: The paper claims that CGD is computationally efficient, but the details of the runtime and resource requirements are not fully explored. Further analysis of the computational complexity would be helpful.
- Robustness to Uncertainty: The paper does not address how CGD would perform in the presence of sensor noise, model uncertainties, or other sources of uncertainty in the environment. Evaluating the robustness of the approach would be an important next step.
- Generalization to Different Domains: The paper focuses on trajectory planning for robot navigation, but the principles of CGD could potentially be applied to other domains, such as traffic scenario generation or guidance and control networks. Exploring the versatility of the approach would be an interesting area of future research.
Overall, the Constraint-Guided Diffusion approach presents a promising solution to the limitations of traditional optimization-based planners and existing neural network policies. By addressing the key issues of dynamic feasibility and constraint adaptability, the researchers have made an important contribution to the field of trajectory planning for autonomous systems.
Conclusion
The paper introduces Constraint-Guided Diffusion (CGD), a novel Imitation Learning-based approach to trajectory planning that addresses the limitations of traditional optimization-based planners and existing neural network policies. By breaking the original optimization problem into two more manageable sub-problems, CGD can generate collision-free, dynamically feasible trajectories that can adapt to changes in the environment, even in scenarios not encountered during training.
The researchers demonstrate significant performance improvements over conventional neural network architectures, highlighting the advantages of the CGD approach. While the paper presents a promising solution, there are some potential caveats and areas for further research, such as scalability, computational efficiency, robustness to uncertainty, and generalization to other domains.
Overall, the Constraint-Guided Diffusion method represents an important advancement in the field of trajectory planning for autonomous systems, with the potential to enable more efficient and versatile navigation in complex, real-world environments.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Constraint-Aware Diffusion Models for Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
0
0
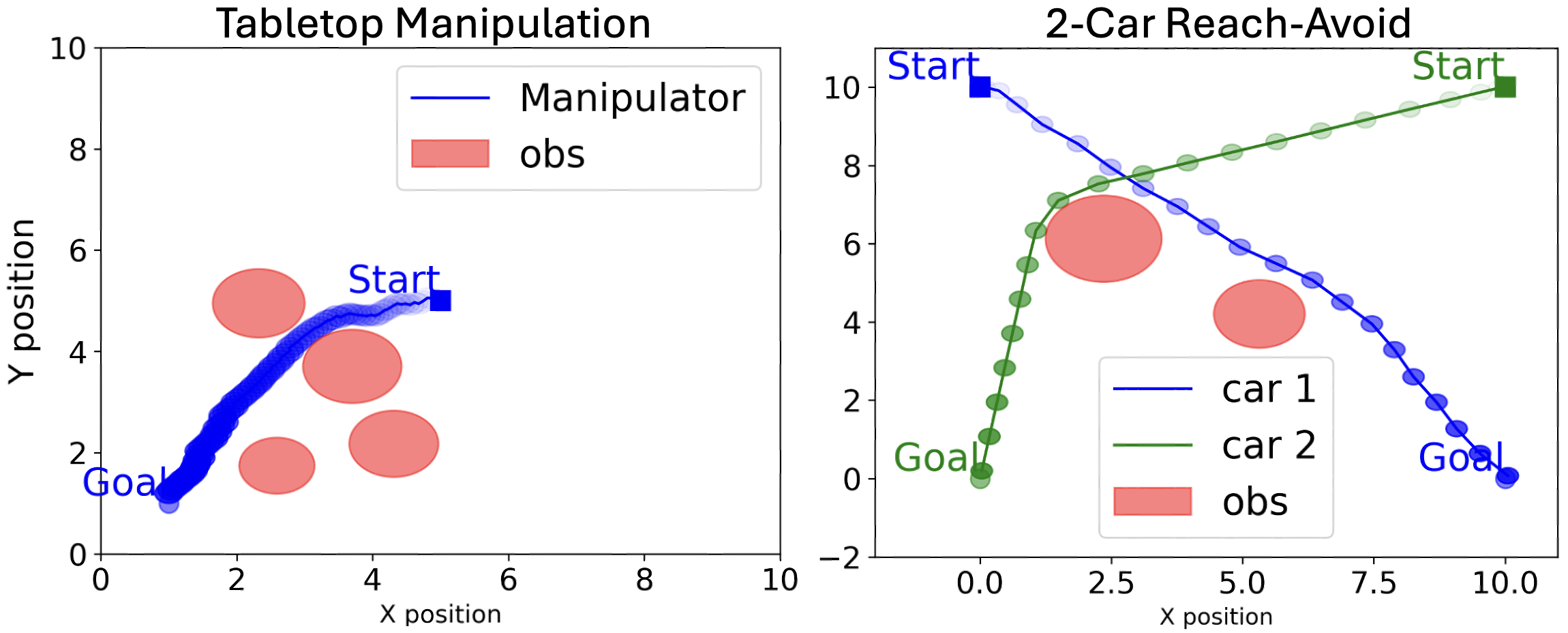
The diffusion model has shown success in generating high-quality and diverse solutions to trajectory optimization problems. However, diffusion models with neural networks inevitably make prediction errors, which leads to constraint violations such as unmet goals or collisions. This paper presents a novel constraint-aware diffusion model for trajectory optimization. We introduce a novel hybrid loss function for training that minimizes the constraint violation of diffusion samples compared to the groundtruth while recovering the original data distribution. Our model is demonstrated on tabletop manipulation and two-car reach-avoid problems, outperforming traditional diffusion models in minimizing constraint violations while generating samples close to locally optimal solutions.
6/4/2024
Policy-Guided Diffusion
Matthew Thomas Jackson, Michael Tryfan Matthews, Cong Lu, Benjamin Ellis, Shimon Whiteson, Jakob Foerster
0
0
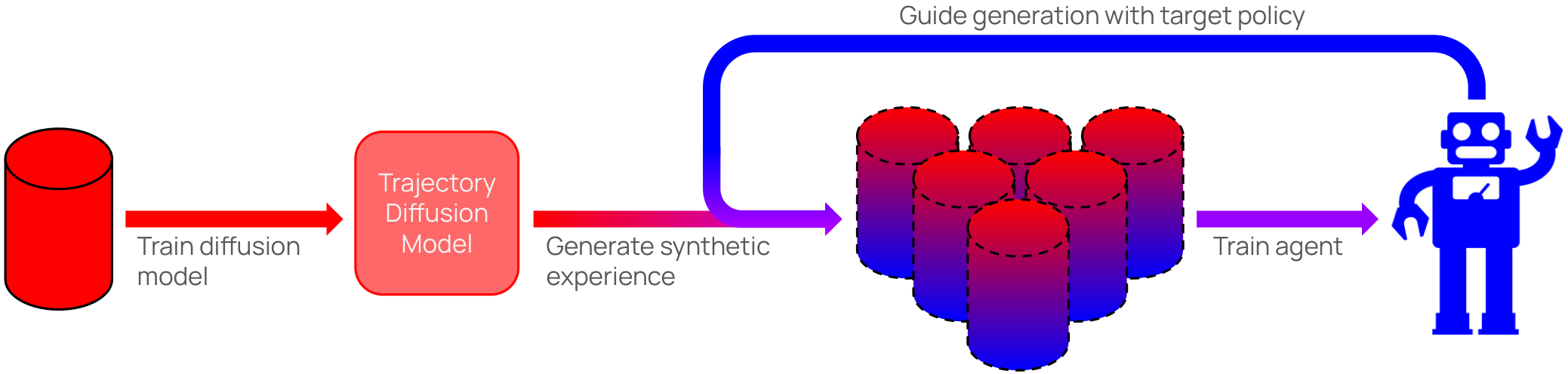
In many real-world settings, agents must learn from an offline dataset gathered by some prior behavior policy. Such a setting naturally leads to distribution shift between the behavior policy and the target policy being trained - requiring policy conservatism to avoid instability and overestimation bias. Autoregressive world models offer a different solution to this by generating synthetic, on-policy experience. However, in practice, model rollouts must be severely truncated to avoid compounding error. As an alternative, we propose policy-guided diffusion. Our method uses diffusion models to generate entire trajectories under the behavior distribution, applying guidance from the target policy to move synthetic experience further on-policy. We show that policy-guided diffusion models a regularized form of the target distribution that balances action likelihood under both the target and behavior policies, leading to plausible trajectories with high target policy probability, while retaining a lower dynamics error than an offline world model baseline. Using synthetic experience from policy-guided diffusion as a drop-in substitute for real data, we demonstrate significant improvements in performance across a range of standard offline reinforcement learning algorithms and environments. Our approach provides an effective alternative to autoregressive offline world models, opening the door to the controllable generation of synthetic training data.
4/10/2024

Combining Constrained Diffusion Models and Numerical Solvers for Efficient and Robust Non-Convex Trajectory Optimization
Anjian Li, Zihan Ding, Adji Bousso Dieng, Ryne Beeson
0
0
Motivated by the need to solve open-loop optimal control problems with computational efficiency and reliable constraint satisfaction, we introduce a general framework that combines diffusion models and numerical optimization solvers. Optimal control problems are rarely solvable in closed form, hence they are often transcribed into numerical trajectory optimization problems, which then require initial guesses. These initial guesses are supplied in our framework by diffusion models. To mitigate the effect of samples that violate the problem constraints, we develop a novel constrained diffusion model to approximate the true distribution of locally optimal solutions with an additional constraint violation loss in training. To further enhance the robustness, the diffusion samples as initial guesses are fed to the numerical solver to refine and derive final optimal (and hence feasible) solutions. Experimental evaluations on three tasks verify the improved constraint satisfaction and computational efficiency with 4$times$ to 30$times$ acceleration using our proposed framework, which generalizes across trajectory optimization problems and scales well with problem complexity.
5/28/2024
Versatile Navigation under Partial Observability via Value-guided Diffusion Policy
Gengyu Zhang, Hao Tang, Yan Yan
0
0
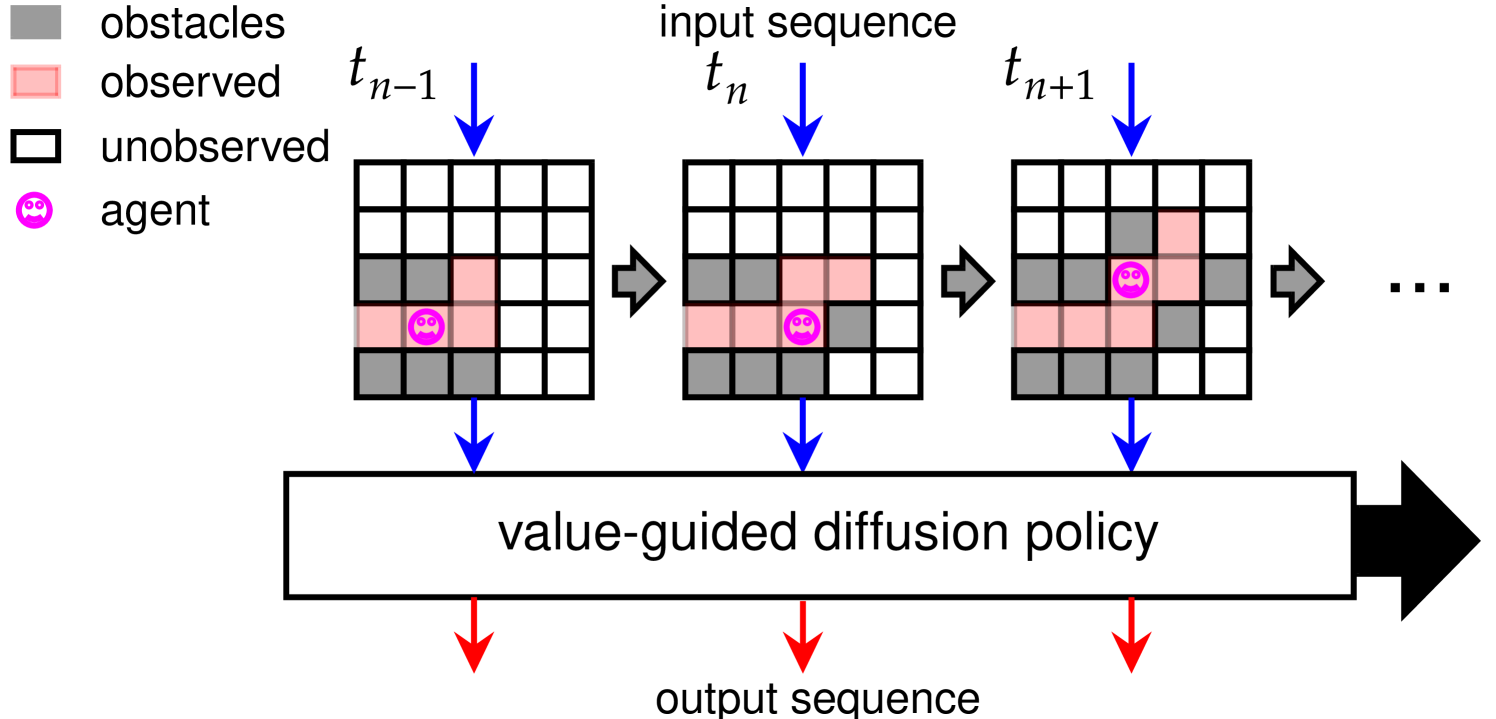
Route planning for navigation under partial observability plays a crucial role in modern robotics and autonomous driving. Existing route planning approaches can be categorized into two main classes: traditional autoregressive and diffusion-based methods. The former often fails due to its myopic nature, while the latter either assumes full observability or struggles to adapt to unfamiliar scenarios, due to strong couplings with behavior cloning from experts. To address these deficiencies, we propose a versatile diffusion-based approach for both 2D and 3D route planning under partial observability. Specifically, our value-guided diffusion policy first generates plans to predict actions across various timesteps, providing ample foresight to the planning. It then employs a differentiable planner with state estimations to derive a value function, directing the agent's exploration and goal-seeking behaviors without seeking experts while explicitly addressing partial observability. During inference, our policy is further enhanced by a best-plan-selection strategy, substantially boosting the planning success rate. Moreover, we propose projecting point clouds, derived from RGB-D inputs, onto 2D grid-based bird-eye-view maps via semantic segmentation, generalizing to 3D environments. This simple yet effective adaption enables zero-shot transfer from 2D-trained policy to 3D, cutting across the laborious training for 3D policy, and thus certifying our versatility. Experimental results demonstrate our superior performance, particularly in navigating situations beyond expert demonstrations, surpassing state-of-the-art autoregressive and diffusion-based baselines for both 2D and 3D scenarios.
4/4/2024