Closing the gap: Optimizing Guidance and Control Networks through Neural ODEs
2404.16908
0
0
🧠
Abstract
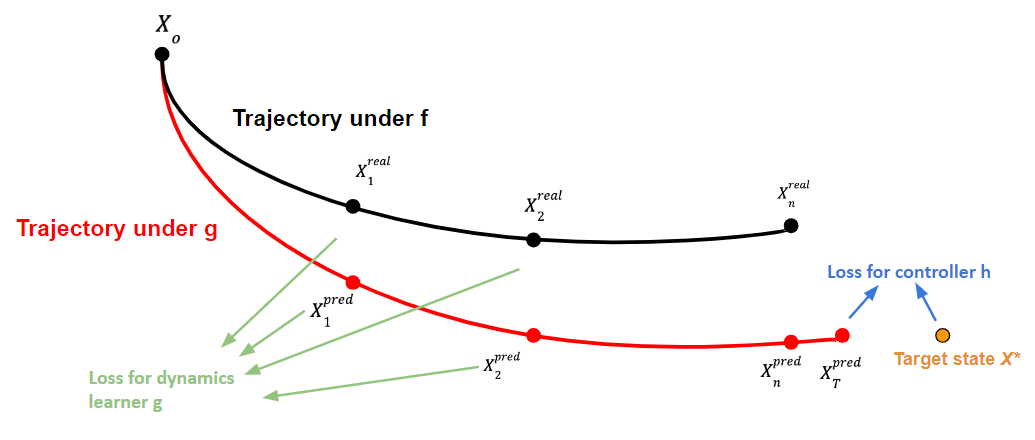
We improve the accuracy of Guidance & Control Networks (G&CNETs), trained to represent the optimal control policies of a time-optimal transfer and a mass-optimal landing, respectively. In both cases we leverage the dynamics of the spacecraft, described by Ordinary Differential Equations which incorporate a neural network on their right-hand side (Neural ODEs). Since the neural dynamics is differentiable, the ODEs sensitivities to the network parameters can be computed using the variational equations, thereby allowing to update the G&CNET parameters based on the observed dynamics. We start with a straightforward regression task, training the G&CNETs on datasets of optimal trajectories using behavioural cloning. These networks are then refined using the Neural ODE sensitivities by minimizing the error between the final states and the target states. We demonstrate that for the orbital transfer, the final error to the target can be reduced by 99% on a single trajectory and by 70% on a batch of 500 trajectories. For the landing problem the reduction in error is around 98-99% (position) and 40-44% (velocity). This step significantly enhances the accuracy of G&CNETs, which instills greater confidence in their reliability for operational use. We also compare our results to the popular Dataset Aggregation method (DaGGER) and allude to the strengths and weaknesses of both methods.
Create account to get full access
Overview
- The paper aims to improve the accuracy of Guidance & Control Networks (G&CNETs), which represent optimal control policies for time-optimal transfer and mass-optimal landing of spacecraft.
- The researchers use Neural Ordinary Differential Equations (Neural ODEs) to model the spacecraft's dynamics, leveraging the differentiable nature of the neural dynamics.
- The G&CNETs are first trained using behavioral cloning on datasets of optimal trajectories, then refined using the sensitivities computed from the Neural ODEs.
- The approach is demonstrated to significantly reduce the final error to the target states, improving the reliability of the G&CNETs for operational use.
Plain English Explanation
The researchers are working to make the control systems for spacecraft more accurate. They're using a type of AI model called a "Guidance & Control Network" (G&CNET) to represent the optimal control policies for two different spacecraft maneuvers: a time-optimal transfer and a mass-optimal landing.
To improve the accuracy of these G&CNETs, the researchers leverage the mathematical equations that describe the spacecraft's movements, called "Ordinary Differential Equations" (ODEs). They've added a neural network component to these ODEs, creating "Neural ODEs", which allows the ODEs to be differentiable. This means the researchers can calculate how sensitive the ODEs are to the parameters of the neural network.
The researchers start by training the G&CNETs using a simple regression task, where the models learn to mimic the behavior of optimal control trajectories. Then, they further refine the G&CNETs by minimizing the error between the final states predicted by the models and the target states, using the sensitivities computed from the Neural ODEs.
Through this process, the researchers are able to significantly reduce the final error to the target states, by up to 99% on a single trajectory and 70% on a batch of 500 trajectories for the orbital transfer problem. For the landing problem, they achieve a 98-99% reduction in position error and 40-44% reduction in velocity error. This improved accuracy makes the G&CNETs more reliable for real-world use in controlling spacecraft.
The researchers also compare their approach to a popular method called "Dataset Aggregation" (DaGGER), and discuss the strengths and weaknesses of both methods.
Technical Explanation
The paper presents a method to improve the accuracy of Guidance & Control Networks (G&CNETs), which are trained to represent the optimal control policies for a time-optimal transfer and a mass-optimal landing of a spacecraft.
The researchers leverage the dynamics of the spacecraft, described by Ordinary Differential Equations (ODEs) that incorporate a neural network on their right-hand side, creating Neural ODEs. Since the neural dynamics is differentiable, the ODEs' sensitivities to the network parameters can be computed using the variational equations, allowing for the update of the G&CNET parameters based on the observed dynamics.
The G&CNETs are first trained on datasets of optimal trajectories using behavioral cloning. These networks are then refined using the Neural ODE sensitivities by minimizing the error between the final states and the target states.
The researchers demonstrate that for the orbital transfer problem, the final error to the target can be reduced by 99% on a single trajectory and by 70% on a batch of 500 trajectories. For the landing problem, the reduction in error is around 98-99% (position) and 40-44% (velocity). This significant enhancement of G&CNET accuracy instills greater confidence in their reliability for operational use.
The researchers also compare their results to the Dataset Aggregation (DaGGER) method, discussing the strengths and weaknesses of both approaches.
Critical Analysis
The paper presents a promising approach to improving the accuracy of Guidance & Control Networks (G&CNETs) for spacecraft control tasks. By leveraging the dynamics of the spacecraft through Neural ODEs, the researchers are able to significantly reduce the error between the predicted final states and the target states.
One potential limitation of the study is the reliance on the accuracy of the ODE models in capturing the true dynamics of the spacecraft. If there are any discrepancies between the modeled dynamics and the actual spacecraft behavior, this could introduce errors that the G&CNET refinement process may not be able to fully compensate for.
Additionally, the paper does not provide a detailed analysis of the computational costs and training times associated with the proposed method. As spacecraft control systems often have strict real-time requirements, the efficiency of the approach would be an important consideration for real-world deployment.
Further research could explore the scalability of the method to more complex spacecraft models or larger datasets, as well as investigate the robustness of the G&CNETs to uncertainties and disturbances that may arise during actual spacecraft operations.
Overall, the paper presents a promising step towards enhancing the reliability and accuracy of spacecraft control systems, which could have significant implications for the future of space exploration and operations.
Conclusion
The researchers in this paper have developed a method to significantly improve the accuracy of Guidance & Control Networks (G&CNETs) for spacecraft control tasks, such as time-optimal transfer and mass-optimal landing. By leveraging the dynamics of the spacecraft through the use of Neural Ordinary Differential Equations (Neural ODEs), they are able to reduce the final error to the target states by up to 99% for a single trajectory and 70% for a batch of 500 trajectories.
This improvement in G&CNET accuracy is an important step towards making these AI-based control systems more reliable and suitable for real-world operational use in spacecraft control. The researchers have also compared their approach to the popular Dataset Aggregation (DaGGER) method, providing insights into the strengths and weaknesses of both techniques.
While the paper presents a promising solution, further research is needed to address potential limitations, such as the reliance on the accuracy of the ODE models and the computational efficiency of the approach. Nonetheless, this work represents a significant contribution to the field of spacecraft control, and could pave the way for more advanced and reliable AI-based control systems in the future.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Neural Control: Concurrent System Identification and Control Learning with Neural ODE
Cheng Chi
0
0
Controlling continuous-time dynamical systems is generally a two step process: first, identify or model the system dynamics with differential equations, then, minimize the control objectives to achieve optimal control function and optimal state trajectories. However, any inaccuracy in dynamics modeling will lead to sub-optimality in the resulting control function. To address this, we propose a neural ODE based method for controlling unknown dynamical systems, denoted as Neural Control (NC), which combines dynamics identification and optimal control learning using a coupled neural ODE. Through an intriguing interplay between the two neural networks in coupled neural ODE structure, our model concurrently learns system dynamics as well as optimal controls that guides towards target states. Our experiments demonstrate the effectiveness of our model for learning optimal control of unknown dynamical systems. Codes available at https://github.com/chichengmessi/neural_ode_control/tree/main
4/23/2024

Zero-Shot Transfer of Neural ODEs
Tyler Ingebrand, Adam J. Thorpe, Ufuk Topcu
0
0
Autonomous systems often encounter environments and scenarios beyond the scope of their training data, which underscores a critical challenge: the need to generalize and adapt to unseen scenarios in real time. This challenge necessitates new mathematical and algorithmic tools that enable adaptation and zero-shot transfer. To this end, we leverage the theory of function encoders, which enables zero-shot transfer by combining the flexibility of neural networks with the mathematical principles of Hilbert spaces. Using this theory, we first present a method for learning a space of dynamics spanned by a set of neural ODE basis functions. After training, the proposed approach can rapidly identify dynamics in the learned space using an efficient inner product calculation. Critically, this calculation requires no gradient calculations or retraining during the online phase. This method enables zero-shot transfer for autonomous systems at runtime and opens the door for a new class of adaptable control algorithms. We demonstrate state-of-the-art system modeling accuracy for two MuJoCo robot environments and show that the learned models can be used for more efficient MPC control of a quadrotor.
5/16/2024
🛸
Learning Governing Equations of Unobserved States in Dynamical Systems
Gevik Grigorian, Sandip V. George, Simon Arridge
0
0
Data-driven modelling and scientific machine learning have been responsible for significant advances in determining suitable models to describe data. Within dynamical systems, neural ordinary differential equations (ODEs), where the system equations are set to be governed by a neural network, have become a popular tool for this challenge in recent years. However, less emphasis has been placed on systems that are only partially-observed. In this work, we employ a hybrid neural ODE structure, where the system equations are governed by a combination of a neural network and domain-specific knowledge, together with symbolic regression (SR), to learn governing equations of partially-observed dynamical systems. We test this approach on two case studies: A 3-dimensional model of the Lotka-Volterra system and a 5-dimensional model of the Lorenz system. We demonstrate that the method is capable of successfully learning the true underlying governing equations of unobserved states within these systems, with robustness to measurement noise.
5/8/2024
🧠
Solving Elliptic Optimal Control Problems via Neural Networks and Optimality System
Yongcheng Dai, Bangti Jin, Ramesh Sau, Zhi Zhou
0
0
In this work, we investigate a neural network based solver for optimal control problems (without / with box constraint) for linear and semilinear second-order elliptic problems. It utilizes a coupled system derived from the first-order optimality system of the optimal control problem, and employs deep neural networks to represent the solutions to the reduced system. We present an error analysis of the scheme, and provide $L^2(Omega)$ error bounds on the state, control and adjoint in terms of neural network parameters (e.g., depth, width, and parameter bounds) and the numbers of sampling points. The main tools in the analysis include offset Rademacher complexity and boundedness and Lipschitz continuity of neural network functions. We present several numerical examples to illustrate the method and compare it with two existing ones.
5/9/2024