Convex MPC and Thrust Allocation with Deadband for Spacecraft Rendezvous
2404.04197
0
0
Abstract
This paper delves into a rendezvous scenario involving a chaser and a target spacecraft, focusing on the application of Model Predictive Control (MPC) to design a controller capable of guiding the chaser toward the target. The operational principle of spacecraft thrusters, requiring a minimum activation time that leads to the existence of a control deadband, introduces mixed-integer constraints into the optimization, posing a considerable computational challenge due to the exponential complexity on the number of integer constraints. We address this complexity by presenting two solver algorithms that efficiently approximate the optimal solution in significantly less time than standard solvers, making them well-suited for real-time applications.
Create account to get full access
Overview
- Presents a convex model predictive control (MPC) approach for spacecraft rendezvous and docking, with a focus on thrust allocation and deadband handling.
- Proposes a novel thrust allocation method that optimizes for minimum fuel consumption while considering thruster deadbands.
- Demonstrates the effectiveness of the proposed approach through simulations and comparisons to traditional methods.
Plain English Explanation
The paper discusses a control system for spacecraft rendezvous and docking, which is the process of two spacecraft maneuvering to meet and attach to each other. The researchers developed a new method called convex model predictive control (MPC) that helps the spacecraft efficiently use their thrusters to get close to the target spacecraft while minimizing fuel consumption.
One key challenge in spacecraft rendezvous is thrust allocation, which is how the spacecraft's thrusters are used to generate the required forces and torques. The researchers' approach optimizes the thrust allocation to minimize fuel use, while also considering the deadbands of the thrusters - the range where the thrusters don't produce any thrust. This is important because it allows the spacecraft to avoid wasting fuel by firing thrusters unnecessarily.
Through computer simulations, the researchers show that their convex MPC method with the improved thrust allocation performs better than traditional approaches, requiring less fuel to complete the rendezvous maneuver.
Technical Explanation
The paper presents a convex MPC approach for spacecraft rendezvous and docking, along with a novel thrust allocation method that considers thruster deadbands.
The researchers first derive a full dynamics model for the spacecraft, including position, velocity, and attitude. They then formulate the rendezvous problem as a convex optimization problem, where the objective is to minimize fuel consumption while meeting constraints on the spacecraft's state and control inputs.
The key innovation is the thrust allocation method, which optimizes the individual thruster commands to generate the required forces and torques. This allocation accounts for the deadbands of the thrusters, ensuring that unnecessary thruster firings are avoided to save fuel.
The proposed approach is evaluated through numerical simulations, where it is compared to traditional thrust allocation methods. The results demonstrate that the convex MPC with the deadband-aware thrust allocation achieves better fuel efficiency in completing the rendezvous maneuver.
Critical Analysis
The paper presents a well-designed and thorough study of the spacecraft rendezvous problem, with a focus on practical considerations like thruster deadbands. The convex optimization framework and the thrust allocation method are novel contributions that could significantly improve the fuel efficiency of rendezvous and docking operations.
However, the paper does not address the computational complexity of the proposed approach, which could be a concern for real-time implementation on spacecraft with limited onboard resources. Additionally, the simulation-based evaluation, while informative, may not fully capture the challenges of real-world scenarios, such as sensor noise, external disturbances, or model uncertainties.
Further research could explore extending the direct data-driven predictive control towards spacecraft applications, or incorporating active learning-based model predictive coverage control to handle uncertainties. Robust adaptive MPC using uncertainty compensation could also be a promising direction to improve the approach's perfecting periodic trajectory tracking capabilities.
Conclusion
The paper presents a convex MPC approach for spacecraft rendezvous and docking that addresses the critical issue of thrust allocation with thruster deadbands. The proposed method demonstrates improved fuel efficiency compared to traditional techniques, which could have significant implications for the design and operation of future spacecraft missions.
While the simulation-based evaluation is promising, further research is needed to assess the approach's performance under more realistic conditions and to explore ways to enhance its robustness and computational efficiency. Overall, this work represents a valuable contribution to the field of spacecraft guidance and control.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🛸
Deadlock Resolution and Recursive Feasibility in MPC-based Multi-robot Trajectory Generation
Yuda Chen, Meng Guo, Zhongkui Li
0
0
Online collision-free trajectory generation within a shared workspace is fundamental for most multi-robot applications. However, many widely-used methods based on model predictive control (MPC) lack theoretical guarantees on the feasibility of underlying optimization. Furthermore, when applied in a distributed manner without a central coordinator, deadlocks often occur where several robots block each other indefinitely. Whereas heuristic methods such as introducing random perturbations exist, no profound analyses are given to validate these measures. Towards this end, we propose a systematic method called infinite-horizon model predictive control with deadlock resolution. The MPC is formulated as a convex optimization over the proposed modified buffered Voronoi with warning band. Based on this formulation, the condition of deadlocks is formally analyzed and proven to be analogous to a force equilibrium. A detection-resolution scheme is proposed, which can effectively detect deadlocks online before they even happen. Once detected, it utilizes an adaptive resolution scheme to resolve deadlocks, under which no stable deadlocks can exist under minor conditions. In addition, the proposed planning algorithm ensures recursive feasibility of the underlying optimization at each time step under both input and model constraints, is concurrent for all robots and requires only local communication. Comprehensive simulation and experiment studies are conducted over large-scale multi-robot systems. Significant improvements on success rate are reported, in comparison with other state-of-the-art methods and especially in crowded and high-speed scenarios.
4/10/2024
Chance-Constrained Control for Safe Spacecraft Autonomy: Convex Programming Approach
Kenshiro Oguri
0
0
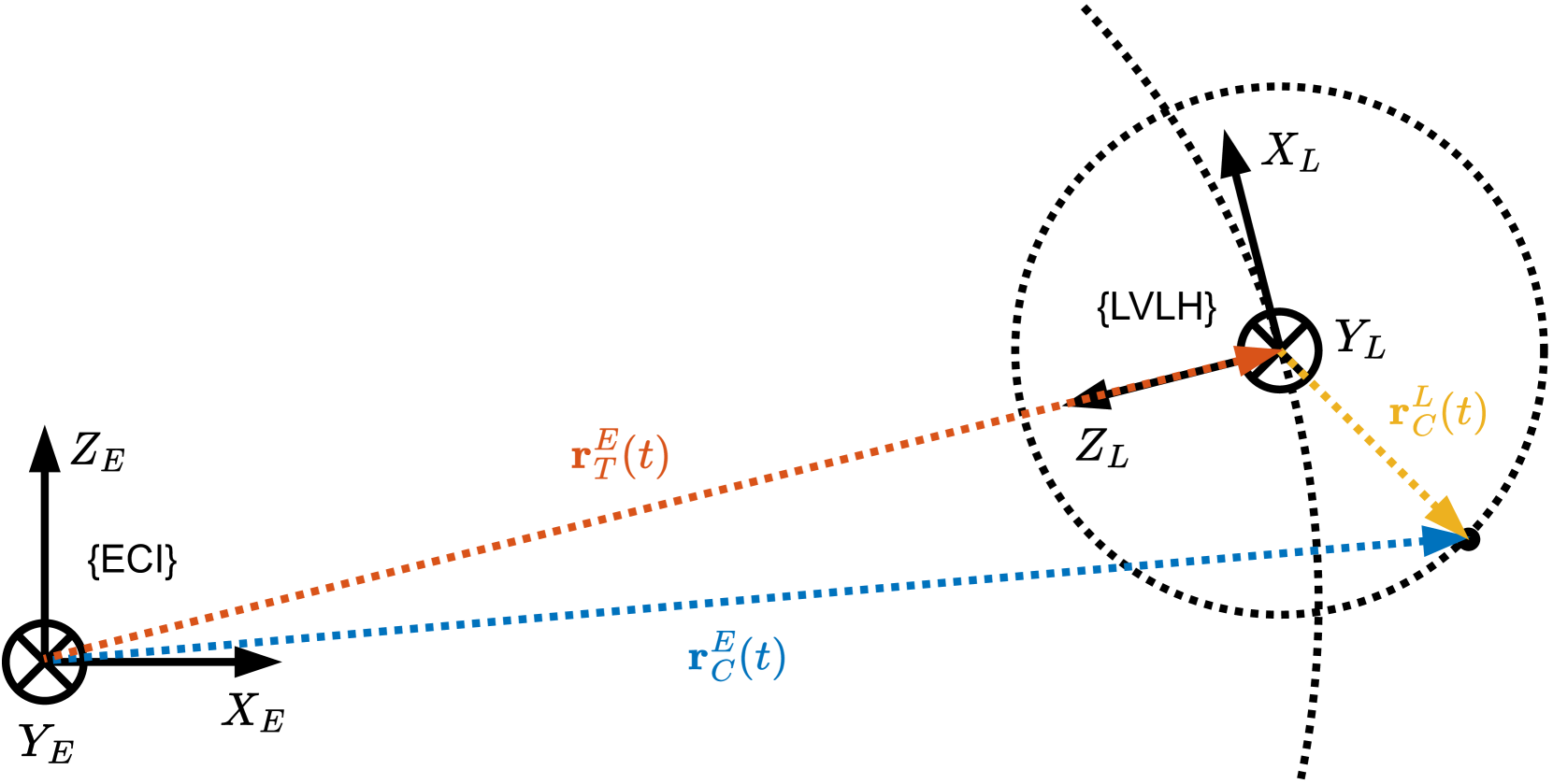
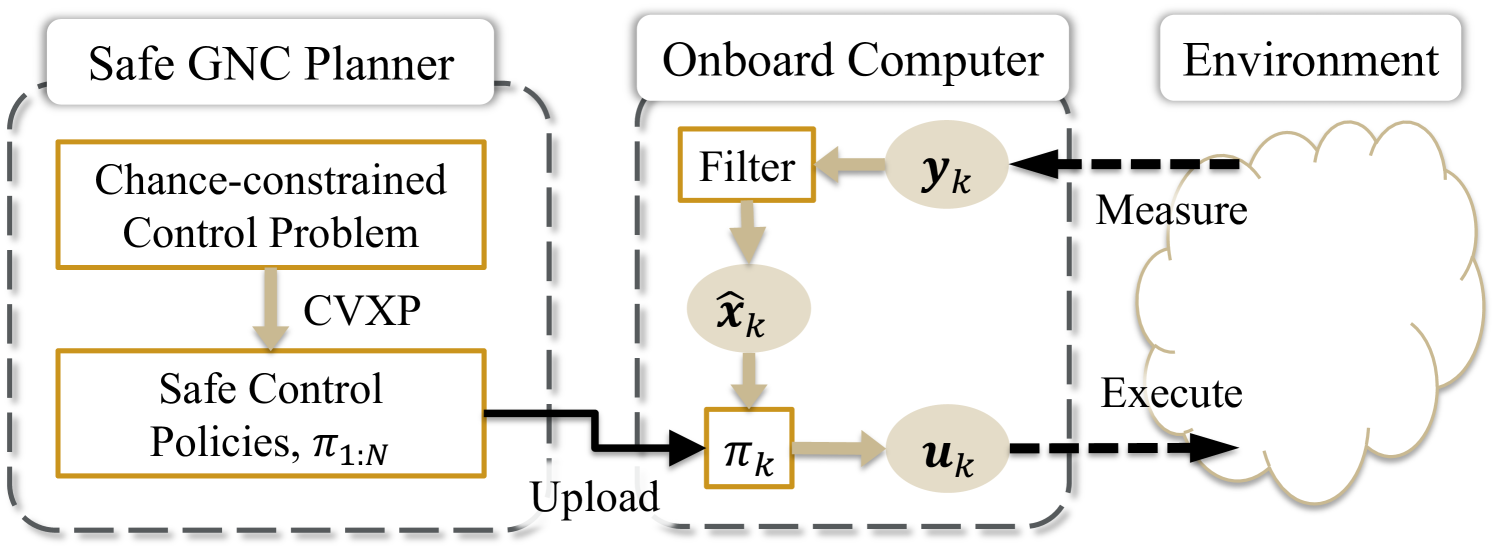
This paper presents a robust path-planning framework for safe spacecraft autonomy under uncertainty and develops a computationally tractable formulation based on convex programming. We utilize chance-constrained control to formulate the problem. It provides a mathematical framework to solve for a sequence of control policies that minimizes a probabilistic cost under probabilistic constraints with a user-defined confidence level (e.g., safety with 99.9% confidence). The framework enables the planner to directly control state distributions under operational uncertainties while ensuring the vehicle safety. This paper rigorously formulates the safe autonomy problem, gathers and extends techniques in literature to accommodate key cost/constraint functions that often arise in spacecraft path planning, and develops a tractable solution method. The presented framework is demonstrated via two representative numerical examples: safe autonomous rendezvous and orbit maintenance in cislunar space, both under uncertainties due to navigation error from Kalman filter, execution error via Gates model, and imperfect force models.
4/19/2024

Rocket Landing Control with Grid Fins and Path-following using MPC
Junhao Yu, Jiarun Wei
0
0
In this project, we attempt to optimize a landing trajectory of a rocket. The goal is to minimize the total fuel consumption during the landing process using different techniques. Once the optimal and feasible trajectory is generated using batch approach, we attempt to follow the path using a Model Predictive Control (MPC) based algorithm, called Trajectory Optimizing Path following Estimation from Demonstration (TOPED), in order to generalize to similar initial states and models, where we introduce a novel cost function for the MPC to solve. We further show that TOPED can follow a demonstration trajectory well in practice under model mismatch and different initial states.
5/28/2024

Embedded Hierarchical MPC for Autonomous Navigation
Dennis Benders, Johannes Kohler, Thijs Niesten, Robert Babuv{s}ka, Javier Alonso-Mora, Laura Ferranti
0
0
To efficiently deploy robotic systems in society, mobile robots need to autonomously and safely move through complex environments. Nonlinear model predictive control (MPC) methods provide a natural way to find a dynamically feasible trajectory through the environment without colliding with nearby obstacles. However, the limited computation power available on typical embedded robotic systems, such as quadrotors, poses a challenge to running MPC in real-time, including its most expensive tasks: constraints generation and optimization. To address this problem, we propose a novel hierarchical MPC scheme that interconnects a planning and a tracking layer. The planner constructs a trajectory with a long prediction horizon at a slow rate, while the tracker ensures trajectory tracking at a relatively fast rate. We prove that the proposed framework avoids collisions and is recursively feasible. Furthermore, we demonstrate its effectiveness in simulations and lab experiments with a quadrotor that needs to reach a goal position in a complex static environment. The code is efficiently implemented on the quadrotor's embedded computer to ensure real-time feasibility. Compared to a state-of-the-art single-layer MPC formulation, this allows us to increase the planning horizon by a factor of 5, which results in significantly better performance.
6/18/2024