CC-VPSTO: Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation for Safe and Efficient Online Robot Motion Planning
2402.01370
0
0
Abstract
Safety in the face of uncertainty is a key challenge in robotics. We introduce a real-time capable framework to generate safe and task-efficient robot motions for stochastic control problems. We frame this as a chance-constrained optimisation problem constraining the probability of the controlled system to violate a safety constraint to be below a set threshold. To estimate this probability we propose a Monte--Carlo approximation. We suggest several ways to construct the problem given a fixed number of uncertainty samples, such that it is a reliable over-approximation of the original problem, i.e. any solution to the sample-based problem adheres to the original chance-constraint with high confidence. To solve the resulting problem, we integrate it into our motion planner VP-STO and name the enhanced framework Chance-Constrained (CC)-VPSTO. The strengths of our approach lie in i) its generality, without assumptions on the underlying uncertainty distribution, system dynamics, cost function, or the form of inequality constraints; and ii) its applicability to MPC-settings. We demonstrate the validity and efficiency of our approach on both simulation and real-world robot experiments.
Create account to get full access
Overview
- This paper presents a novel motion planning algorithm called CC-VPSTO (Chance-Constrained Via-Point-based Stochastic Trajectory Optimisation) for safe and efficient online robot motion planning in cyber-physical robotic systems.
- The algorithm addresses the challenges of collision-free trajectory optimization in cluttered environments by incorporating chance constraints and stochastic optimization.
- The proposed method also aims to resolve deadlock issues and enable safe planning in dynamic environments based on a model predictive control (MPC) framework.
Plain English Explanation
The paper describes a new algorithm called CC-VPSTO that helps robots plan their movements in a safe and efficient way, even in complex environments with obstacles and moving objects. The key idea is to use a method called "chance constraints" to deal with the uncertainty and randomness that can occur in real-world situations.
Traditionally, robot motion planning has focused on finding the shortest or most direct path to a goal. However, this can be problematic in cluttered or dynamic environments, where unexpected obstacles or moving objects can cause collisions. The CC-VPSTO algorithm addresses this by introducing "via-points" - intermediate points along the path that the robot must pass through. This allows the robot to navigate more safely around obstacles while still trying to reach its goal efficiently.
The algorithm also incorporates a stochastic optimization approach, which means it takes into account the probability of certain events happening, like an object moving into the robot's path. This allows the robot to plan for these uncertainties and adjust its path accordingly, reducing the risk of collisions.
Additionally, the CC-VPSTO method uses a model predictive control (MPC) framework, which helps the robot respond quickly to changes in its environment. This is important for navigating dynamic environments where obstacles and moving objects can appear suddenly.
Overall, the CC-VPSTO algorithm represents an advance in robot motion planning, enabling robots to move safely and efficiently even in complex, uncertain, and changing environments. This could have important applications in a wide range of cyber-physical robotic systems, from autonomous vehicles to industrial robots working in warehouses.
Technical Explanation
The paper presents the CC-VPSTO algorithm, which combines chance constraints and stochastic optimization to enable safe and efficient online robot motion planning in cluttered and dynamic environments. The key elements of the approach are:
-
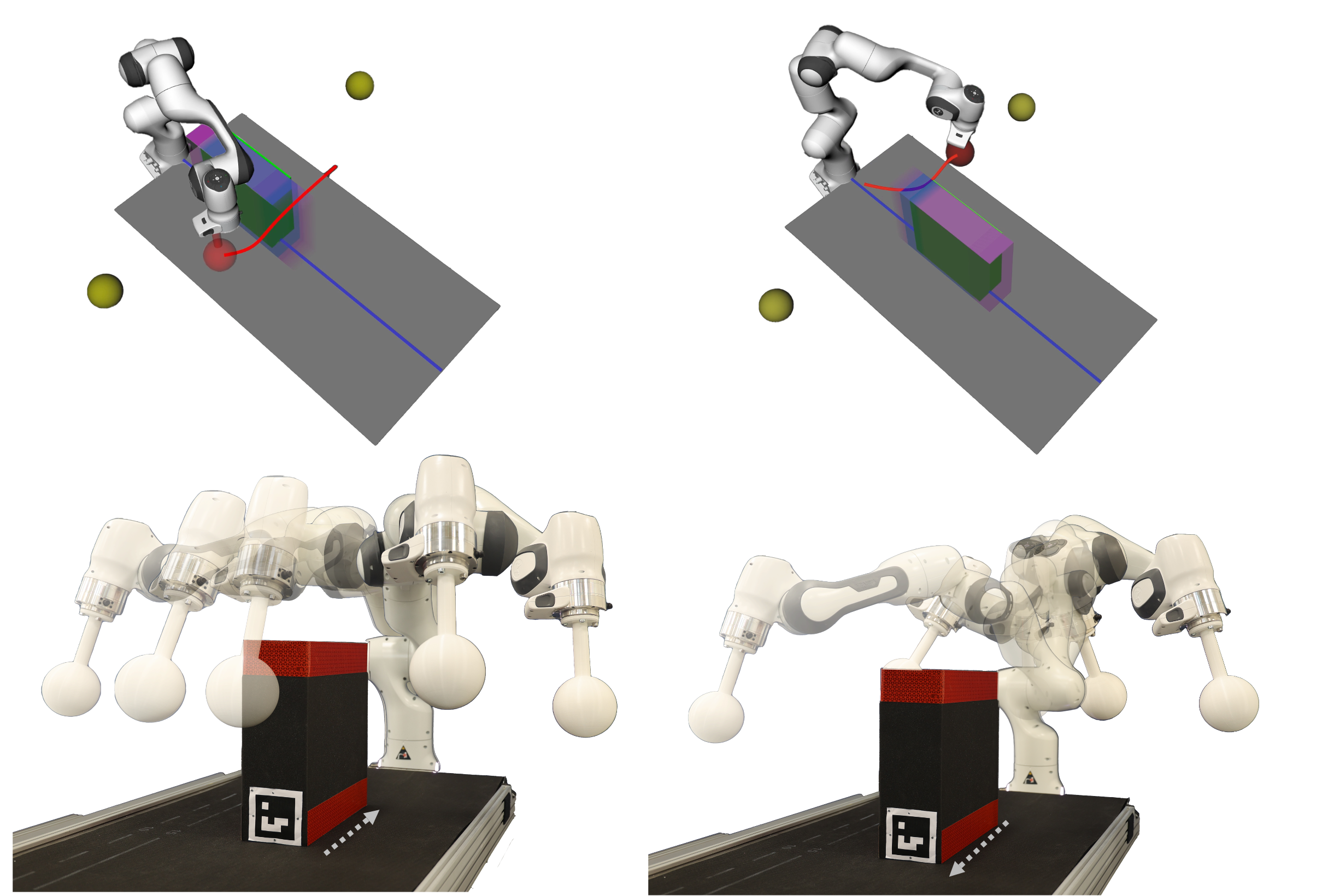
Via-Point-based Trajectory Optimization: Rather than planning a direct path to the goal, the algorithm generates a trajectory that passes through a sequence of "via-points" - intermediate waypoints that the robot must reach. This allows the robot to navigate around obstacles more effectively, as shown in collision-free trajectory optimization in cluttered environments.
-
Chance Constraints: The algorithm incorporates chance constraints, which limit the probability of constraint violations (e.g., collisions) to a specified level. This allows the robot to account for uncertainty in its environment, such as the movement of dynamic obstacles, and plan accordingly.
-
Stochastic Optimization: The trajectory optimization problem is formulated as a stochastic program, where the objective function and constraints are defined in terms of probability distributions. This enables the robot to reason about the likelihood of different outcomes and find a path that balances safety and efficiency.
-
Model Predictive Control (MPC): The CC-VPSTO algorithm is implemented within an MPC framework, which allows the robot to continuously update its plan based on new sensor information and adapt to changes in the environment. This is critical for navigating dynamic environments and resolving deadlock situations.
The authors evaluate the performance of CC-VPSTO through simulations and real-world experiments, demonstrating its ability to generate safe and efficient trajectories in cluttered and dynamic environments, even in the presence of uncertainty and disturbances.
Critical Analysis
The paper presents a well-designed and comprehensive approach to the problem of safe and efficient robot motion planning in complex environments. The incorporation of chance constraints and stochastic optimization is a notable advance, as it allows the robot to reason about uncertainty and find plans that balance safety and efficiency.
One potential limitation of the approach is the computational complexity of the underlying optimization problem, which may limit its real-time applicability for some applications. The authors mention that they have implemented techniques to improve the computational efficiency, but further research may be needed to enable deployment in highly dynamic and resource-constrained scenarios.
Additionally, the paper does not provide a detailed analysis of the robustness of the CC-VPSTO algorithm to model errors or sensor noise, which could be an important consideration for real-world deployment. Safe interval RRT and other related techniques may provide useful insights in this regard.
Overall, the CC-VPSTO algorithm represents a significant contribution to the field of robot motion planning, with potential applications in a wide range of cyber-physical robotic systems. The authors have demonstrated the effectiveness of their approach through thorough experimentation, and the paper serves as a valuable resource for researchers and practitioners working in this area.
Conclusion
The CC-VPSTO algorithm presented in this paper addresses the critical challenge of safe and efficient robot motion planning in cluttered and dynamic environments. By incorporating chance constraints and stochastic optimization, the algorithm enables robots to navigate around obstacles and respond to uncertain, changing conditions while balancing safety and efficiency.
The authors have demonstrated the effectiveness of their approach through simulations and real-world experiments, showcasing the potential of CC-VPSTO for a wide range of cyber-physical robotic systems, from autonomous vehicles to industrial robots. The incorporation of model predictive control further enhances the algorithm's ability to adapt to changing environments, making it a valuable tool for navigating complex, dynamic scenarios.
While the computational complexity of the underlying optimization problem may present some challenges, the authors have proposed strategies to address this, and the overall approach represents a significant advancement in the field of robot motion planning. The critical analysis highlights areas for further research, such as the robustness of the algorithm to model errors and sensor noise, which could further strengthen its applicability in real-world settings.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
Chance-Constrained Control for Safe Spacecraft Autonomy: Convex Programming Approach
Kenshiro Oguri
0
0
This paper presents a robust path-planning framework for safe spacecraft autonomy under uncertainty and develops a computationally tractable formulation based on convex programming. We utilize chance-constrained control to formulate the problem. It provides a mathematical framework to solve for a sequence of control policies that minimizes a probabilistic cost under probabilistic constraints with a user-defined confidence level (e.g., safety with 99.9% confidence). The framework enables the planner to directly control state distributions under operational uncertainties while ensuring the vehicle safety. This paper rigorously formulates the safe autonomy problem, gathers and extends techniques in literature to accommodate key cost/constraint functions that often arise in spacecraft path planning, and develops a tractable solution method. The presented framework is demonstrated via two representative numerical examples: safe autonomous rendezvous and orbit maintenance in cislunar space, both under uncertainties due to navigation error from Kalman filter, execution error via Gates model, and imperfect force models.
4/19/2024

Guarantees on Robot System Performance Using Stochastic Simulation Rollouts
Joseph A. Vincent, Aaron O. Feldman, Mac Schwager
0
0
We provide finite-sample performance guarantees for control policies executed on stochastic robotic systems. Given an open- or closed-loop policy and a finite set of trajectory rollouts under the policy, we bound the expected value, value-at-risk, and conditional-value-at-risk of the trajectory cost, and the probability of failure in a sparse cost setting. The bounds hold, with user-specified probability, for any policy synthesis technique and can be seen as a post-design safety certification. Generating the bounds only requires sampling simulation rollouts, without assumptions on the distribution or complexity of the underlying stochastic system. We adapt these bounds to also give a constraint satisfaction test to verify safety of the robot system. We provide a thorough analysis of the bound sensitivity to sim-to-real distribution shifts and provide results for constructing robust bounds that can tolerate some specified amount of distribution shift. Furthermore, we extend our method to apply when selecting the best policy from a set of candidates, requiring a multi-hypothesis correction. We show the statistical validity of our bounds in the Ant, Half-cheetah, and Swimmer MuJoCo environments and demonstrate our constraint satisfaction test with the Ant. Finally, using the 20 degree-of-freedom MuJoCo Shadow Hand, we show the necessity of the multi-hypothesis correction.
6/17/2024
❗
Multi-contact Stochastic Predictive Control for Legged Robots with Contact Locations Uncertainty
Ahmad Gazar, Majid Khadiv, Andrea Del Prete, Ludovic Righetti
0
0
Trajectory optimization under uncertainties is a challenging problem for robots in contact with the environment. Such uncertainties are inevitable due to estimation errors, control imperfections, and model mismatches between planning models used for control and the real robot dynamics. This induces control policies that could violate the contact location constraints by making contact at unintended locations, and as a consequence leading to unsafe motion plans. This work addresses the problem of robust kino-dynamic whole-body trajectory optimization using stochastic nonlinear model predictive control (SNMPC) by considering additive uncertainties on the model dynamics subject to contact location chance-constraints as a function of robot's full kinematics. We demonstrate the benefit of using SNMPC over classic nonlinear MPC (NMPC) for whole-body trajectory optimization in terms of contact location constraint satisfaction (safety). We run extensive Monte-Carlo simulations for a quadruped robot performing agile trotting and bounding motions over small stepping stones, where contact location satisfaction becomes critical. Our results show that SNMPC is able to perform all motions safely with 100% success rate, while NMPC failed 48.3% of all motions.
6/14/2024
ConstrainedZero: Chance-Constrained POMDP Planning using Learned Probabilistic Failure Surrogates and Adaptive Safety Constraints
Robert J. Moss, Arec Jamgochian, Johannes Fischer, Anthony Corso, Mykel J. Kochenderfer
0
0
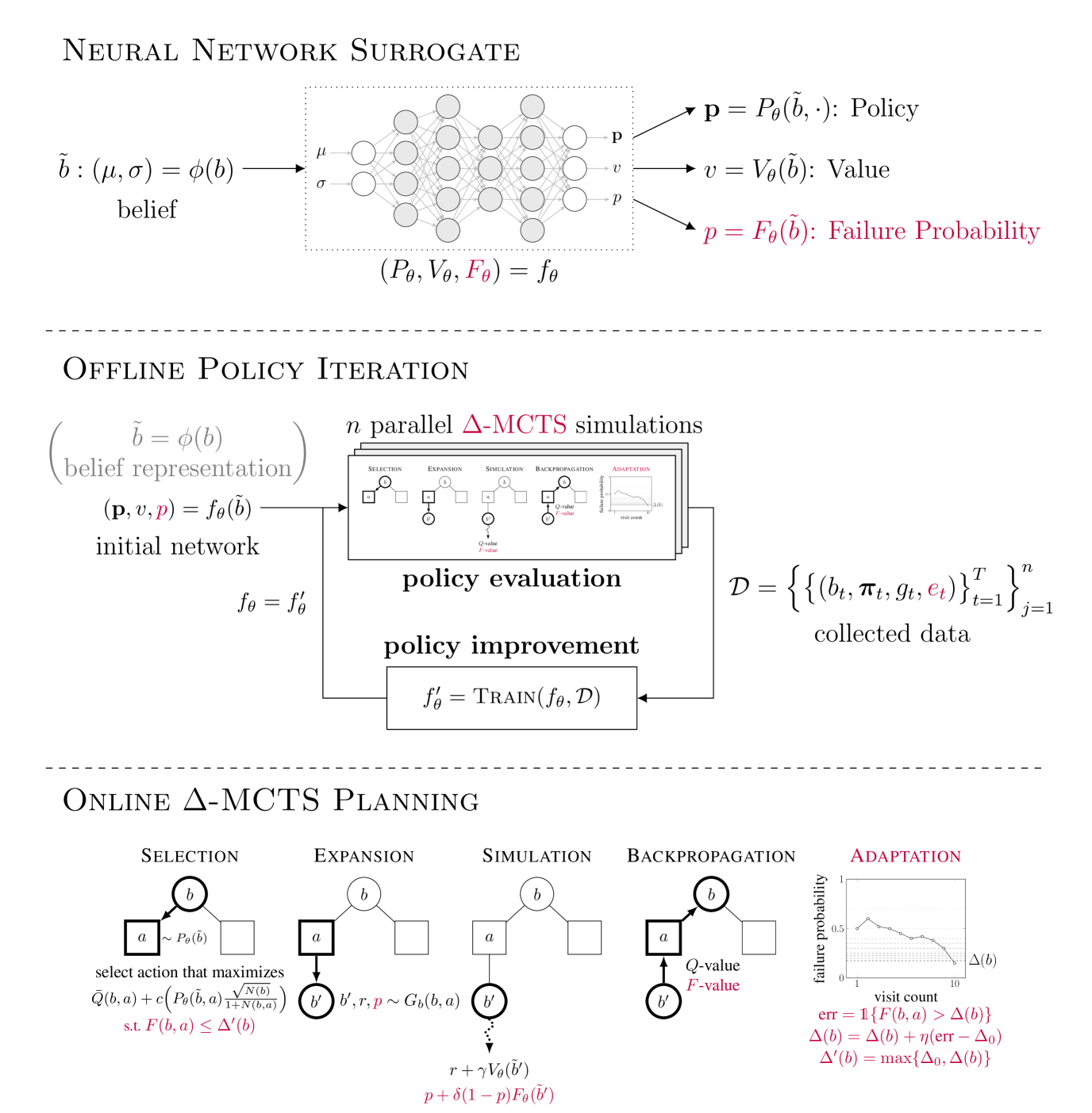
To plan safely in uncertain environments, agents must balance utility with safety constraints. Safe planning problems can be modeled as a chance-constrained partially observable Markov decision process (CC-POMDP) and solutions often use expensive rollouts or heuristics to estimate the optimal value and action-selection policy. This work introduces the ConstrainedZero policy iteration algorithm that solves CC-POMDPs in belief space by learning neural network approximations of the optimal value and policy with an additional network head that estimates the failure probability given a belief. This failure probability guides safe action selection during online Monte Carlo tree search (MCTS). To avoid overemphasizing search based on the failure estimates, we introduce $Delta$-MCTS, which uses adaptive conformal inference to update the failure threshold during planning. The approach is tested on a safety-critical POMDP benchmark, an aircraft collision avoidance system, and the sustainability problem of safe CO$_2$ storage. Results show that by separating safety constraints from the objective we can achieve a target level of safety without optimizing the balance between rewards and costs.
5/2/2024