Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V

0

Sign in to get full access
Overview
- This paper presents a novel method for closed-loop open-vocabulary mobile manipulation using a language model called GPT-4V.
- The approach combines natural language understanding, planning, and control to enable robots to follow complex instructions and interact with objects in their environment.
- The system is designed to be versatile and adaptable, allowing robots to carry out a wide range of tasks without the need for explicit programming.
Plain English Explanation
The researchers have developed a new way for robots to understand and follow instructions using a powerful language model called GPT-4V. This allows the robots to perform a variety of tasks, like moving around and manipulating objects, just by being given commands in plain language.
The key idea is that the robot can take instructions expressed in natural language and translate them into the specific actions it needs to take. For example, if you tell the robot "Pick up the red ball and put it on the table," it can figure out what to do without needing detailed, pre-programmed steps.
This approach is more flexible than traditional robot control systems, which are often limited to a specific set of predefined tasks. With the language model, the robot can adapt to new situations and carry out a much wider range of commands. This could make robots more useful and versatile in real-world settings, where they may need to handle all kinds of unpredictable tasks.
The paper also shows how the robot can continuously learn and improve its performance through a closed-loop feedback system, which allows it to adjust its actions based on the results. This helps the robot get better over time at interpreting instructions and carrying them out effectively.
Overall, this research represents an important step towards more natural and adaptive robot control, with potential applications in areas like home assistance, industrial automation, and disaster response.
Technical Explanation
The paper presents a closed-loop, open-vocabulary mobile manipulation system that uses a large language model called GPT-4V as its core component. The system consists of several key modules:
-
Natural Language Understanding: The language model takes natural language instructions as input and generates an internal representation of the desired task and target objects.
-
Planning: Based on the language understanding, the system plans a sequence of actions to achieve the specified goal, taking into account the current state of the robot and its environment.
-
Control: The planned actions are then executed by the robot's low-level control system, which performs the necessary movements and manipulations.
-
Perception: Throughout the process, the robot's sensors provide feedback on the state of the world, allowing the system to continuously adapt and refine its actions in a closed loop.
The key innovation of this work is the tight integration of language understanding, planning, and control, enabled by the powerful GPT-4V model. This allows the robot to follow complex, open-ended instructions without the need for explicit programming of task-specific behaviors.
The authors demonstrate the effectiveness of their approach through a series of simulated and real-world experiments, where the robot is able to carry out a variety of mobile manipulation tasks, such as fetching, placing, and rearranging objects. The results show that the system can adapt to novel situations and outperform traditional task-specific controllers.
Critical Analysis
One potential limitation of the approach is the reliance on the GPT-4V language model, which may be computationally expensive and require significant training data. The authors acknowledge this issue and suggest that future work could explore more efficient language modeling techniques or the use of modular, composable language understanding.
Additionally, the paper does not address potential safety and reliability concerns that may arise when using a large language model for critical robotic applications. Further research is needed to ensure the system's robustness and accountability, especially in high-stakes scenarios.
Another area for improvement could be the integration of additional sensory modalities beyond the basic perception used in the current work, which may help the robot better understand and interact with its environment.
Overall, the research presented in this paper represents a promising step towards more natural and adaptable robot control, with the potential to enable a wide range of practical applications. However, further development and validation will be necessary to address the identified limitations and ensure the safety and reliability of the system.
Conclusion
The authors have developed a novel closed-loop, open-vocabulary mobile manipulation system that uses a powerful language model, GPT-4V, to enable robots to understand and follow complex instructions in natural language. This approach allows for more flexible and adaptable robot control, with the potential to expand the range of tasks that robots can perform.
The tight integration of language understanding, planning, and control, along with the closed-loop feedback system, is a key innovation that sets this work apart from traditional robot control methods. The demonstrated results in simulation and real-world experiments are encouraging, suggesting that this technology could have significant impact in various applications, such as home assistance, industrial automation, and disaster response.
However, the reliance on large language models and the need to address safety and reliability concerns will require further research and development. Exploring more efficient language understanding techniques and integrating additional sensory modalities could also help to improve the system's performance and robustness.
Overall, this paper represents an important step towards more natural and adaptive robot control, and the findings could have far-reaching implications for the field of robotics and beyond.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V
Peiyuan Zhi, Zhiyuan Zhang, Muzhi Han, Zeyu Zhang, Zhitian Li, Ziyuan Jiao, Baoxiong Jia, Siyuan Huang
Autonomous robot navigation and manipulation in open environments require reasoning and replanning with closed-loop feedback. We present COME-robot, the first closed-loop framework utilizing the GPT-4V vision-language foundation model for open-ended reasoning and adaptive planning in real-world scenarios. We meticulously construct a library of action primitives for robot exploration, navigation, and manipulation, serving as callable execution modules for GPT-4V in task planning. On top of these modules, GPT-4V serves as the brain that can accomplish multimodal reasoning, generate action policy with code, verify the task progress, and provide feedback for replanning. Such design enables COME-robot to (i) actively perceive the environments, (ii) perform situated reasoning, and (iii) recover from failures. Through comprehensive experiments involving 8 challenging real-world tabletop and manipulation tasks, COME-robot demonstrates a significant improvement in task success rate (~25%) compared to state-of-the-art baseline methods. We further conduct comprehensive analyses to elucidate how COME-robot's design facilitates failure recovery, free-form instruction following, and long-horizon task planning.
Read more4/17/2024
✅
0
GPT-4V(ision) for Robotics: Multimodal Task Planning from Human Demonstration
Naoki Wake, Atsushi Kanehira, Kazuhiro Sasabuchi, Jun Takamatsu, Katsushi Ikeuchi
We introduce a pipeline that enhances a general-purpose Vision Language Model, GPT-4V(ision), to facilitate one-shot visual teaching for robotic manipulation. This system analyzes videos of humans performing tasks and outputs executable robot programs that incorporate insights into affordances. The process begins with GPT-4V analyzing the videos to obtain textual explanations of environmental and action details. A GPT-4-based task planner then encodes these details into a symbolic task plan. Subsequently, vision systems spatially and temporally ground the task plan in the videos. Objects are identified using an open-vocabulary object detector, and hand-object interactions are analyzed to pinpoint moments of grasping and releasing. This spatiotemporal grounding allows for the gathering of affordance information (e.g., grasp types, waypoints, and body postures) critical for robot execution. Experiments across various scenarios demonstrate the method's efficacy in enabling real robots to operate from one-shot human demonstrations. Meanwhile, quantitative tests have revealed instances of hallucination in GPT-4V, highlighting the importance of incorporating human supervision within the pipeline. The prompts of GPT-4V/GPT-4 are available at this project page: https://microsoft.github.io/GPT4Vision-Robot-Manipulation-Prompts/
Read more9/30/2024
0
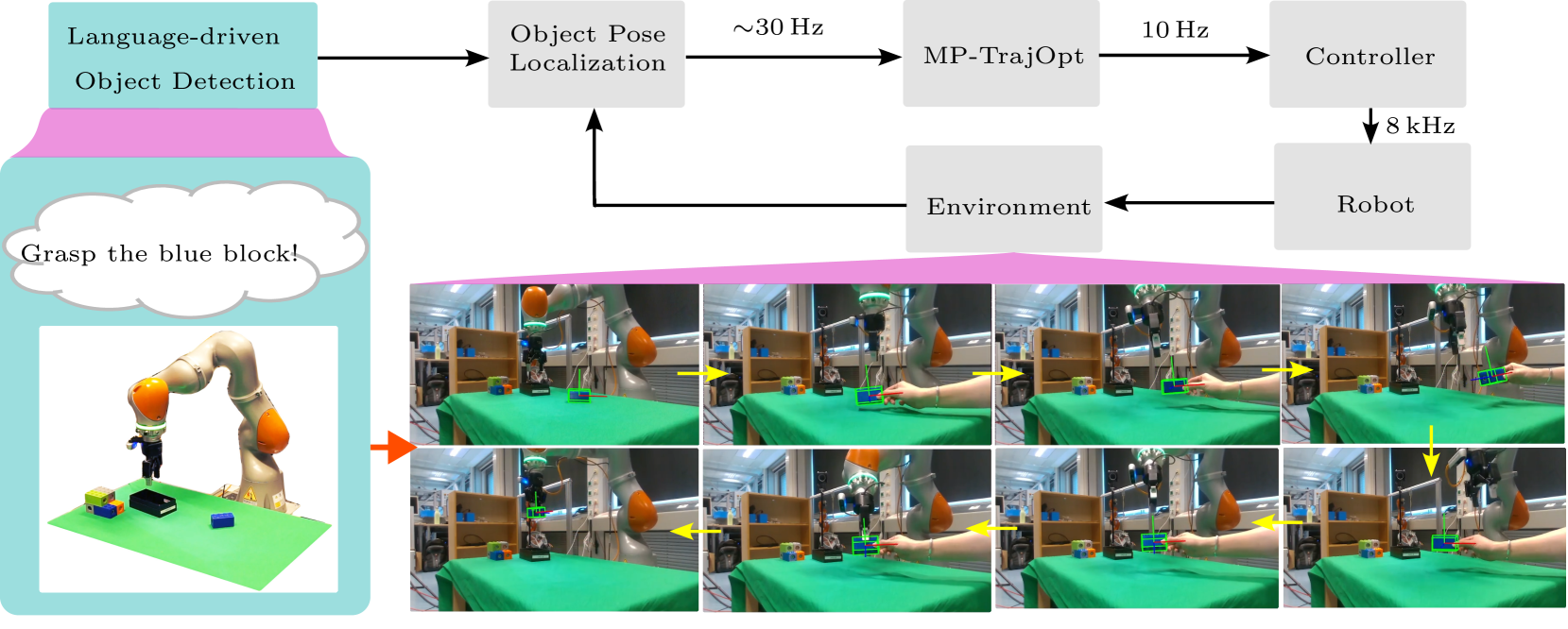
Language-Driven Closed-Loop Grasping with Model-Predictive Trajectory Replanning
Huy Hoang Nguyen, Minh Nhat Vu, Florian Beck, Gerald Ebmer, Anh Nguyen, Andreas Kugi
Combining a vision module inside a closed-loop control system for a emph{seamless movement} of a robot in a manipulation task is challenging due to the inconsistent update rates between utilized modules. This task is even more difficult in a dynamic environment, e.g., objects are moving. This paper presents a emph{modular} zero-shot framework for language-driven manipulation of (dynamic) objects through a closed-loop control system with real-time trajectory replanning and an online 6D object pose localization. We segment an object within $SI{0.5}{second}$ by leveraging a vision language model via language commands. Then, guided by natural language commands, a closed-loop system, including a unified pose estimation and tracking and online trajectory planning, is utilized to continuously track this object and compute the optimal trajectory in real-time. Our proposed zero-shot framework provides a smooth trajectory that avoids jerky movements and ensures the robot can grasp a non-stationary object. Experiment results exhibit the real-time capability of the proposed zero-shot modular framework for the trajectory optimization module to accurately and efficiently grasp moving objects, i.e., up to SI{30}{hertz} update rates for the online 6D pose localization module and SI{10}{hertz} update rates for the receding-horizon trajectory optimization. These advantages highlight the modular framework's potential applications in robotics and human-robot interaction; see the video in https://www.acin.tuwien.ac.at/en/6e64/.
Read more6/21/2024

0
Open-vocabulary Pick and Place via Patch-level Semantic Maps
Mingxi Jia, Haojie Huang, Zhewen Zhang, Chenghao Wang, Linfeng Zhao, Dian Wang, Jason Xinyu Liu, Robin Walters, Robert Platt, Stefanie Tellex
Controlling robots through natural language instructions in open-vocabulary scenarios is pivotal for enhancing human-robot collaboration and complex robot behavior synthesis. However, achieving this capability poses significant challenges due to the need for a system that can generalize from limited data to a wide range of tasks and environments. Existing methods rely on large, costly datasets and struggle with generalization. This paper introduces Grounded Equivariant Manipulation (GEM), a novel approach that leverages the generative capabilities of pre-trained vision-language models and geometric symmetries to facilitate few-shot and zero-shot learning for open-vocabulary robot manipulation tasks. Our experiments demonstrate GEM's high sample efficiency and superior generalization across diverse pick-and-place tasks in both simulation and real-world experiments, showcasing its ability to adapt to novel instructions and unseen objects with minimal data requirements. GEM advances a significant step forward in the domain of language-conditioned robot control, bridging the gap between semantic understanding and action generation in robotic systems.
Read more6/26/2024