Solving Elliptic Optimal Control Problems via Neural Networks and Optimality System
2308.11925
0
0
🧠
Abstract
In this work, we investigate a neural network based solver for optimal control problems (without / with box constraint) for linear and semilinear second-order elliptic problems. It utilizes a coupled system derived from the first-order optimality system of the optimal control problem, and employs deep neural networks to represent the solutions to the reduced system. We present an error analysis of the scheme, and provide $L^2(Omega)$ error bounds on the state, control and adjoint in terms of neural network parameters (e.g., depth, width, and parameter bounds) and the numbers of sampling points. The main tools in the analysis include offset Rademacher complexity and boundedness and Lipschitz continuity of neural network functions. We present several numerical examples to illustrate the method and compare it with two existing ones.
Create account to get full access
Overview
- This paper investigates a neural network-based approach to solving optimal control problems for linear and semilinear second-order elliptic problems.
- The method utilizes a coupled system derived from the first-order optimality system of the optimal control problem and employs deep neural networks to represent the solutions to the reduced system.
- The paper provides an error analysis of the scheme and presents L^2(Omega) error bounds on the state, control, and adjoint variables in terms of neural network parameters and the number of sampling points.
- Several numerical examples are provided to illustrate the method and compare it to two existing approaches.
Plain English Explanation
This research explores using neural networks to solve optimal control problems. Optimal control problems involve finding the best way to control a system or process to achieve a desired outcome. The researchers focused on a specific type of optimal control problem involving linear and semilinear second-order elliptic equations, which are mathematical models used in engineering and science.
The key idea is to use a neural network to represent the solutions to the optimality conditions of the control problem, rather than solving the problem directly. This allows the neural network to learn the optimal control strategy from data, similar to how neural networks can learn to control systems through concurrent system identification and control learning.
The researchers provide a mathematical analysis of the error in this neural network-based approach, showing that the error can be bounded in terms of properties of the neural network, such as its depth, width, and parameter values. They also demonstrate the approach on several example problems and compare it to other existing methods.
The main benefit of this neural network-based approach is that it can potentially solve complex optimal control problems more efficiently than traditional numerical methods, especially for problems with a large number of variables or constraints. This could have applications in areas like guidance and control of complex systems, robotics, and engineering design optimization.
Technical Explanation
The paper presents a neural network-based approach for solving optimal control problems for linear and semilinear second-order elliptic problems. The method involves first deriving a coupled system of equations from the first-order optimality conditions of the optimal control problem. This reduced system is then solved using deep neural networks to represent the solutions.
The key steps of the approach are:
- Formulate the optimal control problem for a linear or semilinear elliptic PDE.
- Derive the first-order optimality conditions, resulting in a coupled system of PDEs.
- Discretize the coupled system using a finite element method.
- Approximate the solutions to the discretized system using deep neural networks.
- Train the neural networks by minimizing the residuals of the discretized optimality system.
The researchers provide an error analysis of this approach, deriving L^2(Omega) error bounds on the state, control, and adjoint variables in terms of neural network parameters (depth, width, parameter bounds) and the number of sampling points used in the training process. The analysis relies on tools from statistical learning theory, such as offset Rademacher complexity and Lipschitz continuity of neural network functions.
Several numerical examples are presented to demonstrate the effectiveness of the proposed method, including problems with and without box constraints on the control variable. The results are compared to two existing approaches, showing the competitive performance of the neural network-based solver.
Critical Analysis
The paper presents a well-designed and thorough analysis of the neural network-based approach to solving optimal control problems. The error bounds provide useful insights into how the neural network architecture and training parameters can affect the accuracy of the solutions.
However, the paper does not address some potential limitations of the approach. For example, the analysis assumes that the neural networks can accurately represent the solutions to the optimality system, which may not always be the case, especially for high-dimensional or highly nonlinear problems. Additionally, the training process may be sensitive to the choice of hyperparameters, and the method may struggle to generalize to problems outside the specific class considered in the paper.
It would also be useful to see more discussion of the computational efficiency of the neural network-based solver compared to traditional numerical methods, as this is often a key motivation for using machine learning techniques. Lyapunov-stable neural control approaches may also be relevant to consider in this context.
Overall, the paper presents an interesting and well-executed piece of research, but further investigation into the broader applicability and limitations of the method would be valuable for the field.
Conclusion
This paper introduces a neural network-based approach for solving optimal control problems involving linear and semilinear second-order elliptic equations. The method leverages deep neural networks to represent the solutions to the reduced optimality system, providing a flexible and potentially efficient alternative to traditional numerical methods.
The key contributions of the work include the error analysis, which quantifies the accuracy of the neural network solutions in terms of the network architecture and training parameters, as well as the extensive numerical experiments demonstrating the effectiveness of the approach.
While the paper highlights the promise of this neural network-based optimal control solver, further research is needed to address its limitations and explore its applicability to a wider range of problems, including hybrid systems and concurrent system identification and control learning scenarios. Nonetheless, this work represents an important contribution to the field of optimal control and the growing application of machine learning techniques in this domain.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
A neural network-based approach to hybrid systems identification for control
Filippo Fabiani, Bartolomeo Stellato, Daniele Masti, Paul J. Goulart
0
0
We consider the problem of designing a machine learning-based model of an unknown dynamical system from a finite number of (state-input)-successor state data points, such that the model obtained is also suitable for optimal control design. We propose a specific neural network (NN) architecture that yields a hybrid system with piecewise-affine dynamics that is differentiable with respect to the network's parameters, thereby enabling the use of derivative-based training procedures. We show that a careful choice of our NN's weights produces a hybrid system model with structural properties that are highly favourable when used as part of a finite horizon optimal control problem (OCP). Specifically, we show that optimal solutions with strong local optimality guarantees can be computed via nonlinear programming, in contrast to classical OCPs for general hybrid systems which typically require mixed-integer optimization. In addition to being well-suited for optimal control design, numerical simulations illustrate that our NN-based technique enjoys very similar performance to state-of-the-art system identification methodologies for hybrid systems and it is competitive on nonlinear benchmarks.
4/3/2024
Neural Control: Concurrent System Identification and Control Learning with Neural ODE
Cheng Chi
0
0
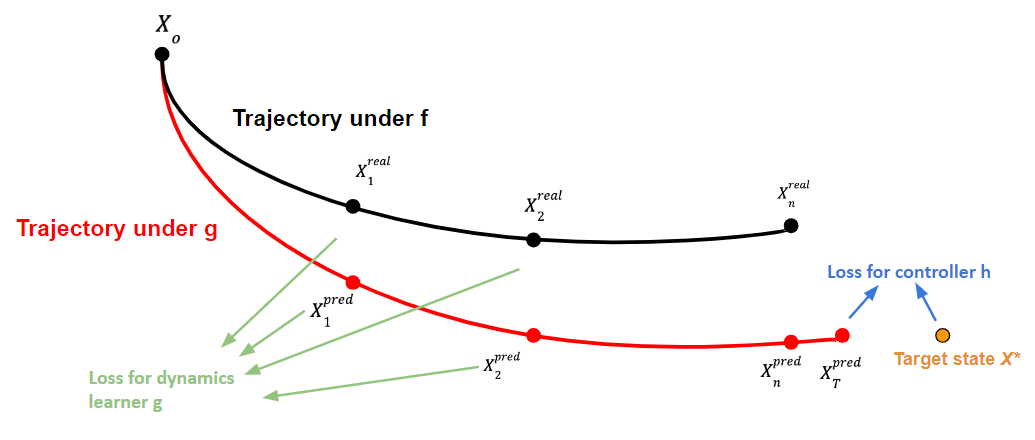
Controlling continuous-time dynamical systems is generally a two step process: first, identify or model the system dynamics with differential equations, then, minimize the control objectives to achieve optimal control function and optimal state trajectories. However, any inaccuracy in dynamics modeling will lead to sub-optimality in the resulting control function. To address this, we propose a neural ODE based method for controlling unknown dynamical systems, denoted as Neural Control (NC), which combines dynamics identification and optimal control learning using a coupled neural ODE. Through an intriguing interplay between the two neural networks in coupled neural ODE structure, our model concurrently learns system dynamics as well as optimal controls that guides towards target states. Our experiments demonstrate the effectiveness of our model for learning optimal control of unknown dynamical systems. Codes available at https://github.com/chichengmessi/neural_ode_control/tree/main
4/23/2024
Efficient model predictive control for nonlinear systems modelled by deep neural networks
Jianglin Lan
0
0
This paper presents a model predictive control (MPC) for dynamic systems whose nonlinearity and uncertainty are modelled by deep neural networks (NNs), under input and state constraints. Since the NN output contains a high-order complex nonlinearity of the system state and control input, the MPC problem is nonlinear and challenging to solve for real-time control. This paper proposes two types of methods for solving the MPC problem: the mixed integer programming (MIP) method which produces an exact solution to the nonlinear MPC, and linear relaxation (LR) methods which generally give suboptimal solutions but are much computationally cheaper. Extensive numerical simulation for an inverted pendulum system modelled by ReLU NNs of various sizes is used to demonstrate and compare performance of the MIP and LR methods.
5/20/2024
🧠
Closing the gap: Optimizing Guidance and Control Networks through Neural ODEs
Sebastien Origer, Dario Izzo
0
0
We improve the accuracy of Guidance & Control Networks (G&CNETs), trained to represent the optimal control policies of a time-optimal transfer and a mass-optimal landing, respectively. In both cases we leverage the dynamics of the spacecraft, described by Ordinary Differential Equations which incorporate a neural network on their right-hand side (Neural ODEs). Since the neural dynamics is differentiable, the ODEs sensitivities to the network parameters can be computed using the variational equations, thereby allowing to update the G&CNET parameters based on the observed dynamics. We start with a straightforward regression task, training the G&CNETs on datasets of optimal trajectories using behavioural cloning. These networks are then refined using the Neural ODE sensitivities by minimizing the error between the final states and the target states. We demonstrate that for the orbital transfer, the final error to the target can be reduced by 99% on a single trajectory and by 70% on a batch of 500 trajectories. For the landing problem the reduction in error is around 98-99% (position) and 40-44% (velocity). This step significantly enhances the accuracy of G&CNETs, which instills greater confidence in their reliability for operational use. We also compare our results to the popular Dataset Aggregation method (DaGGER) and allude to the strengths and weaknesses of both methods.
4/29/2024