CloudTrack: Scalable UAV Tracking with Cloud Semantics

0
🚀
Sign in to get full access
Overview
- The paper discusses a new method for object tracking using unmanned aerial vehicles (UAVs) called OVTrack.
- OVTrack leverages cloud computing and semantic information to enable scalable and effective object tracking.
- The paper presents the system architecture, experimental results, and potential applications of OVTrack.
Plain English Explanation
OVTrack: Scalable UAV Tracking with Cloud Semantics is a new approach to object tracking using drones or UAVs. The key idea is to use cloud computing and semantic information to make the tracking process more scalable and effective.
Traditionally, object tracking with UAVs has been challenging due to the limited computing power and storage on the drones themselves. OVTrack addresses this by offloading the heavy processing to the cloud. The UAVs send visual data to the cloud, which then uses advanced algorithms and semantic information to identify and track objects of interest.
This cloud-based approach allows OVTrack to scale to tracking multiple objects simultaneously across a wide area. The semantic information, such as object classifications and relationships, also helps improve the accuracy and robustness of the tracking.
The paper demonstrates the capabilities of OVTrack through extensive experiments, showing that it can effectively track people, vehicles, and other objects in complex real-world scenarios. The authors also discuss potential applications, such as surveillance, search and rescue, and autonomous navigation.
Technical Explanation
OVTrack: Scalable UAV Tracking with Cloud Semantics presents a new system architecture for object tracking using unmanned aerial vehicles (UAVs) that leverages cloud computing and semantic information.
The key components of the OVTrack system include:
- UAV Capture: The UAVs capture visual data, such as images and videos, of the environment and objects of interest.
- Cloud Processing: The visual data is sent to the cloud, where advanced computer vision and machine learning algorithms are used to detect, identify, and track the objects.
- Semantic Integration: Semantic information about the objects, such as their classifications and relationships, is incorporated into the tracking process to improve accuracy and robustness.
- Scalable Tracking: The cloud-based architecture allows OVTrack to scale to tracking multiple objects simultaneously across a wide area.
The authors evaluate the performance of OVTrack through extensive experiments, comparing it to state-of-the-art object tracking methods. The results demonstrate that OVTrack can effectively track people, vehicles, and other objects in complex real-world scenarios, with improved accuracy and scalability compared to traditional UAV-based tracking approaches.
Critical Analysis
The paper provides a comprehensive description of the OVTrack system and its technical implementation. The authors have thoughtfully addressed several key challenges in UAV-based object tracking, such as limited onboard computing power and the need for scalable and robust tracking.
One potential limitation of the OVTrack approach is the reliance on cloud computing, which may introduce additional latency and require a reliable network connection. The authors acknowledge this and discuss strategies to mitigate these issues, such as edge computing and offline processing.
Additionally, the paper could have explored the privacy and security implications of a cloud-based tracking system, as well as potential ethical concerns around the use of UAVs for surveillance and monitoring purposes. These are important considerations that warrant further discussion.
Overall, the OVTrack system represents a promising advancement in the field of UAV-based object tracking, and the paper provides valuable insights and a solid technical foundation for future research and development in this area.
Conclusion
OVTrack: Scalable UAV Tracking with Cloud Semantics presents a novel approach to object tracking using unmanned aerial vehicles (UAVs) that leverages cloud computing and semantic information. The key innovation of OVTrack is its ability to offload the heavy processing to the cloud, enabling scalable and effective tracking of multiple objects across a wide area.
The paper demonstrates the technical capabilities of OVTrack through extensive experiments, showing its superiority over traditional UAV-based tracking methods. The authors also discuss potential applications, such as surveillance, search and rescue, and autonomous navigation, highlighting the broader significance and impact of this research.
While the paper acknowledges some potential limitations, such as the reliance on cloud computing, the OVTrack system represents a significant step forward in the field of UAV-based object tracking. This work could inspire further research and development in this area, ultimately leading to more advanced and practical solutions for a wide range of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
🚀
0
CloudTrack: Scalable UAV Tracking with Cloud Semantics
Yannik Blei, Michael Krawez, Nisarga Nilavadi, Tanja Katharina Kaiser, Wolfram Burgard
Nowadays, unmanned aerial vehicles (UAVs) are commonly used in search and rescue scenarios to gather information in the search area. The automatic identification of the person searched for in aerial footage could increase the autonomy of such systems, reduce the search time, and thus increase the missed person's chances of survival. In this paper, we present a novel approach to perform semantically conditioned open vocabulary object tracking that is specifically designed to cope with the limitations of UAV hardware. Our approach has several advantages. It can run with verbal descriptions of the missing person, e.g., the color of the shirt, it does not require dedicated training to execute the mission and can efficiently track a potentially moving person. Our experimental results demonstrate the versatility and efficacy of our approach.
Read more9/25/2024
0
Set-membership target search and tracking within an unknown cluttered area using cooperating UAVs equipped with vision systems
Maxime Zagar, Luc Meyer, Michel Kieffer, H'el`eene Piet-Lahanier
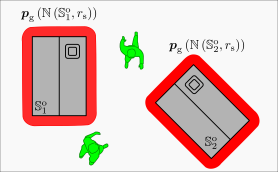
This paper addresses the problem of target search and tracking using a fleet of cooperating UAVs evolving in some unknown region of interest containing an a priori unknown number of moving ground targets. Each drone is equipped with an embedded Computer Vision System (CVS), providing an image with labeled pixels and a depth map of the observed part of its environment. Moreover, a box containing the corresponding pixels in the image frame is available when a UAV identifies a target. Hypotheses regarding information provided by the pixel classification, depth map construction, and target identification algorithms are proposed to allow its exploitation by set-membership approaches. A set-membership target location estimator is developed using the information provided by the CVS. Each UAV evaluates sets guaranteed to contain the location of the identified targets and a set possibly containing the locations of targets still to be identified. Then, each UAV uses these sets to search and track targets cooperatively.
Read more7/16/2024

0
Clustering-based Learning for UAV Tracking and Pose Estimation
Jiaping Xiao, Phumrapee Pisutsin, Cheng Wen Tsao, Mir Feroskhan
UAV tracking and pose estimation plays an imperative role in various UAV-related missions, such as formation control and anti-UAV measures. Accurately detecting and tracking UAVs in a 3D space remains a particularly challenging problem, as it requires extracting sparse features of micro UAVs from different flight environments and continuously matching correspondences, especially during agile flight. Generally, cameras and LiDARs are the two main types of sensors used to capture UAV trajectories in flight. However, both sensors have limitations in UAV classification and pose estimation. This technical report briefly introduces the method proposed by our team NTU-ICG for the CVPR 2024 UG2+ Challenge Track 5. This work develops a clustering-based learning detection approach, CL-Det, for UAV tracking and pose estimation using two types of LiDARs, namely Livox Avia and LiDAR 360. We combine the information from the two data sources to locate drones in 3D. We first align the timestamps of Livox Avia data and LiDAR 360 data and then separate the point cloud of objects of interest (OOIs) from the environment. The point cloud of OOIs is clustered using the DBSCAN method, with the midpoint of the largest cluster assumed to be the UAV position. Furthermore, we utilize historical estimations to fill in missing data. The proposed method shows competitive pose estimation performance and ranks 5th on the final leaderboard of the CVPR 2024 UG2+ Challenge.
Read more5/28/2024
0
UAV-Based Human Body Detector Selection and Fusion for Geolocated Saliency Map Generation
Piotr Rudol, Patrick Doherty, Mariusz Wzorek, Chattrakul Sombattheera
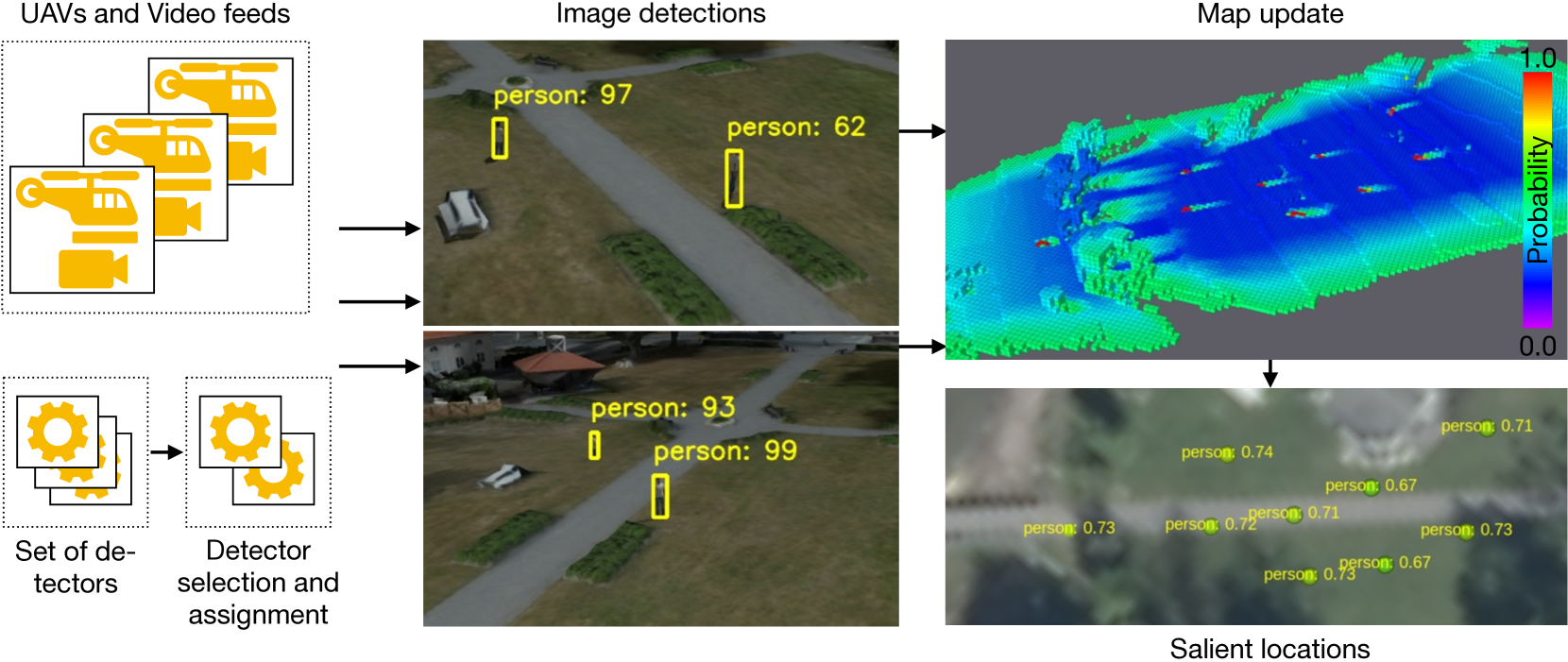
The problem of reliably detecting and geolocating objects of different classes in soft real-time is essential in many application areas, such as Search and Rescue performed using Unmanned Aerial Vehicles (UAVs). This research addresses the complementary problems of system contextual vision-based detector selection, allocation, and execution, in addition to the fusion of detection results from teams of UAVs for the purpose of accurately and reliably geolocating objects of interest in a timely manner. In an offline step, an application-independent evaluation of vision-based detectors from a system perspective is first performed. Based on this evaluation, the most appropriate algorithms for online object detection for each platform are selected automatically before a mission, taking into account a number of practical system considerations, such as the available communication links, video compression used, and the available computational resources. The detection results are fused using a method for building maps of salient locations which takes advantage of a novel sensor model for vision-based detections for both positive and negative observations. A number of simulated and real flight experiments are also presented, validating the proposed method.
Read more8/30/2024