UAV-Based Human Body Detector Selection and Fusion for Geolocated Saliency Map Generation

0
Sign in to get full access
Overview
- The paper presents a method for selecting and fusing multiple human body detectors on UAV (Unmanned Aerial Vehicle) imagery to generate a geolocated saliency map.
- The approach aims to improve human detection and localization for applications like search and rescue, surveillance, and mapping.
- The proposed method involves selecting the most appropriate human body detectors, fusing their outputs, and generating a saliency map with precise geolocation information.
Plain English Explanation
The researchers have developed a system that can effectively detect and locate people in images captured by drones or UAVs. This is important for various applications, such as search and rescue operations, surveillance, and mapping.
The key idea is to use multiple human body detectors, each with its own strengths and weaknesses, and then combine their outputs to create a more accurate and reliable detection system. The system selects the most appropriate detectors based on factors like the environment, lighting conditions, and the type of people being searched for.
Once the detectors are selected, their outputs are fused together to generate a "saliency map" - a visual representation that highlights the locations where human bodies are likely to be present. Importantly, this saliency map also includes precise geolocation information, which is crucial for applications like search and rescue where knowing the exact location of a person is vital.
By using this approach, the researchers aim to improve the accuracy and reliability of human detection and localization in UAV imagery, ultimately making these technologies more useful for a wide range of real-world applications.
Technical Explanation
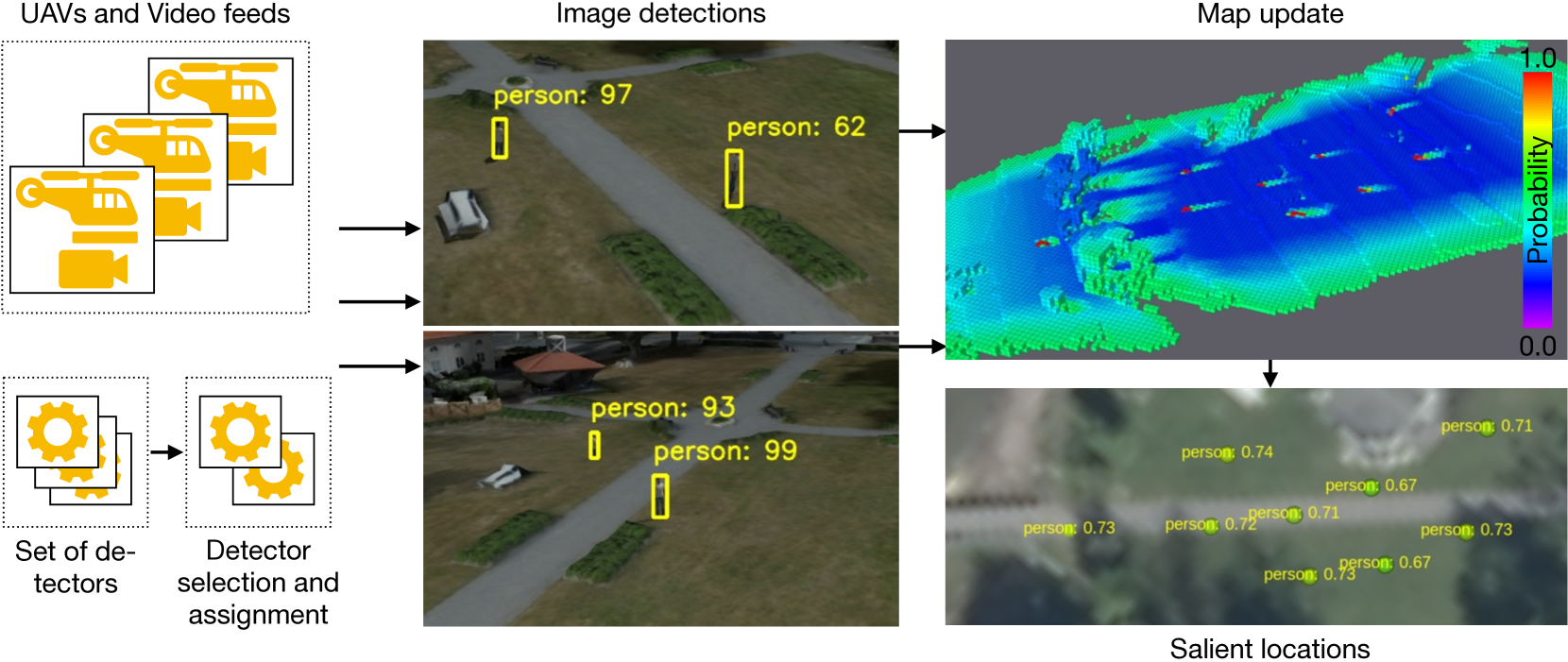
The paper proposes a method for selecting and fusing multiple human body detectors on UAV imagery to generate a geolocated saliency map. The key steps of the proposed approach are:
-
Detector Selection: The system evaluates the performance of several pre-trained human body detectors (e.g., YOLOv5, Mask R-CNN, etc.) on a validation dataset and selects the most appropriate ones based on factors like detection accuracy, inference speed, and robustness to environmental conditions.
-
Detector Fusion: The outputs of the selected detectors are fused using techniques like weighted averaging and non-maximum suppression to generate a combined detection result.
-
Saliency Map Generation: The fused detection results are used to create a geolocated saliency map, which highlights the areas in the UAV imagery where human bodies are most likely to be present. The saliency map includes precise geolocation information, which is critical for applications like search and rescue.
The authors evaluate their approach on several UAV datasets and demonstrate that it outperforms using a single human body detector in terms of detection accuracy and localization precision.
Critical Analysis
The paper presents a well-designed and thorough approach to improving human detection and localization in UAV imagery. However, some potential limitations and areas for further research are worth considering:
-
Dataset Bias: The performance of the proposed method may be influenced by the characteristics of the datasets used for training and evaluation. It would be valuable to assess the method's robustness across a more diverse range of environments, lighting conditions, and types of human subjects.
-
Real-time Performance: While the paper discusses the importance of inference speed, the actual real-time performance of the system in operational settings is not thoroughly evaluated. Further testing in realistic scenarios would be necessary to ensure the method's suitability for time-critical applications.
-
Generalizability: The paper focuses on human detection and localization, but the proposed techniques could potentially be extended to other types of objects or targets of interest. Investigating the broader applicability of the method could make it more valuable for a wider range of UAV-based applications.
-
Ethical Considerations: The use of UAV-based human detection and localization raises important ethical concerns, such as privacy, surveillance, and the potential for misuse. The paper does not address these considerations, which should be an important area for future research and discussion.
Overall, the paper presents a valuable contribution to the field of UAV-based computer vision, and the proposed method has the potential to enhance a variety of real-world applications. However, the research could be further strengthened by addressing the identified limitations and exploring the broader implications of this technology.
Conclusion
The paper introduces a novel approach for selecting and fusing multiple human body detectors on UAV imagery to generate a geolocated saliency map. This method aims to improve the accuracy and reliability of human detection and localization, which is crucial for applications like search and rescue, surveillance, and mapping.
By leveraging the strengths of different human body detectors and fusing their outputs, the proposed system can provide more robust and precise detection results compared to using a single detector. Additionally, the inclusion of geolocation information in the saliency map enhances the practical utility of the system for real-world deployments.
While the paper presents a well-designed and promising approach, there are some areas for further research and consideration, such as dataset bias, real-time performance, generalizability, and ethical implications. Addressing these aspects could help strengthen the impact and broader applicability of the proposed technique in the field of UAV-based computer vision.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
UAV-Based Human Body Detector Selection and Fusion for Geolocated Saliency Map Generation
Piotr Rudol, Patrick Doherty, Mariusz Wzorek, Chattrakul Sombattheera
The problem of reliably detecting and geolocating objects of different classes in soft real-time is essential in many application areas, such as Search and Rescue performed using Unmanned Aerial Vehicles (UAVs). This research addresses the complementary problems of system contextual vision-based detector selection, allocation, and execution, in addition to the fusion of detection results from teams of UAVs for the purpose of accurately and reliably geolocating objects of interest in a timely manner. In an offline step, an application-independent evaluation of vision-based detectors from a system perspective is first performed. Based on this evaluation, the most appropriate algorithms for online object detection for each platform are selected automatically before a mission, taking into account a number of practical system considerations, such as the available communication links, video compression used, and the available computational resources. The detection results are fused using a method for building maps of salient locations which takes advantage of a novel sensor model for vision-based detections for both positive and negative observations. A number of simulated and real flight experiments are also presented, validating the proposed method.
Read more8/30/2024
0
Leveraging edge detection and neural networks for better UAV localization
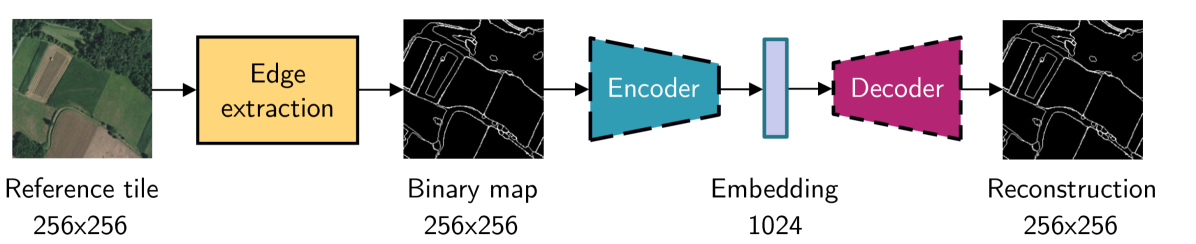
Theo Di Piazza, Enric Meinhardt-Llopis, Gabriele Facciolo, Benedicte Bascle, Corentin Abgrall, Jean-Clement Devaux
We propose a novel method for geolocalizing Unmanned Aerial Vehicles (UAVs) in environments lacking Global Navigation Satellite Systems (GNSS). Current state-of-the-art techniques employ an offline-trained encoder to generate a vector representation (embedding) of the UAV's current view, which is then compared with pre-computed embeddings of geo-referenced images to determine the UAV's position. Here, we demonstrate that the performance of these methods can be significantly enhanced by preprocessing the images to extract their edges, which exhibit robustness to seasonal and illumination variations. Furthermore, we establish that utilizing edges enhances resilience to orientation and altitude inaccuracies. Additionally, we introduce a confidence criterion for localization. Our findings are substantiated through synthetic experiments.
Read more6/4/2024
0
Ensuring UAV Safety: A Vision-only and Real-time Framework for Collision Avoidance Through Object Detection, Tracking, and Distance Estimation
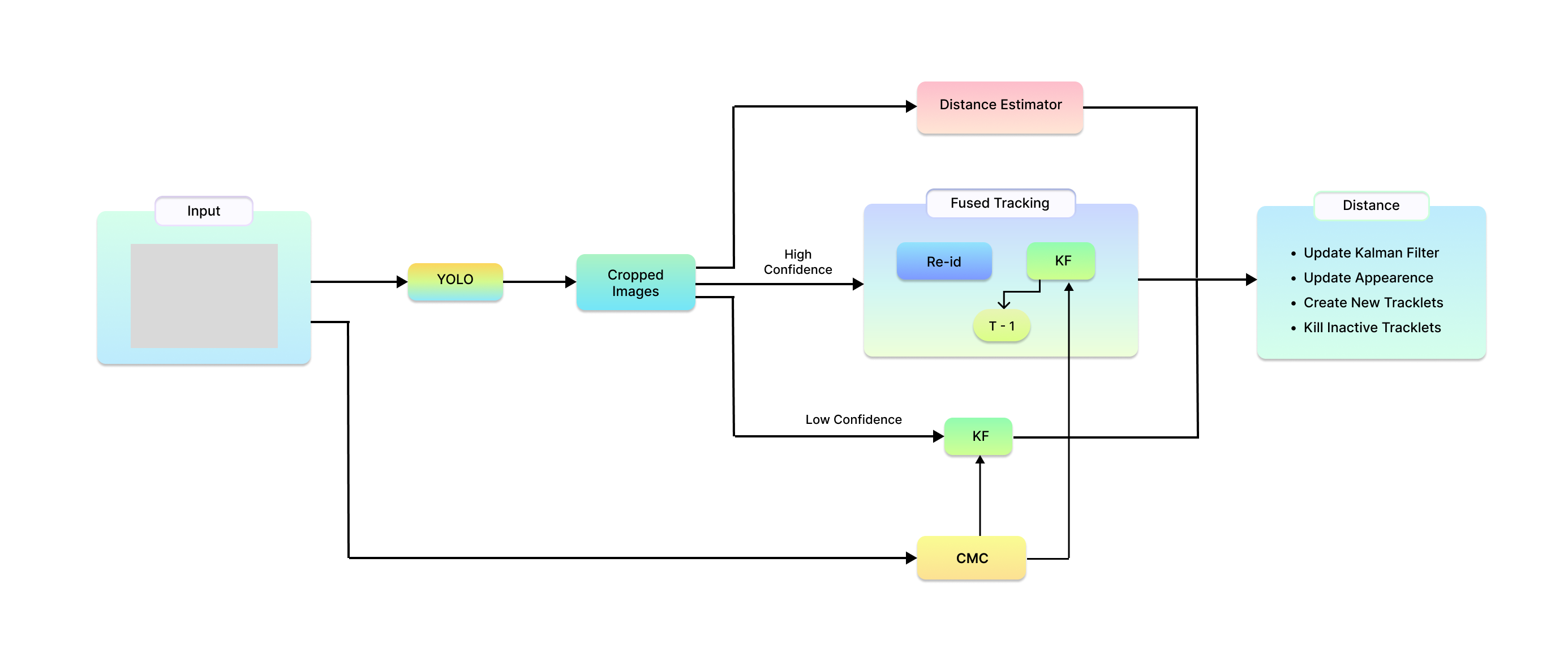
Vasileios Karampinis, Anastasios Arsenos, Orfeas Filippopoulos, Evangelos Petrongonas, Christos Skliros, Dimitrios Kollias, Stefanos Kollias, Athanasios Voulodimos
In the last twenty years, unmanned aerial vehicles (UAVs) have garnered growing interest due to their expanding applications in both military and civilian domains. Detecting non-cooperative aerial vehicles with efficiency and estimating collisions accurately are pivotal for achieving fully autonomous aircraft and facilitating Advanced Air Mobility (AAM). This paper presents a deep-learning framework that utilizes optical sensors for the detection, tracking, and distance estimation of non-cooperative aerial vehicles. In implementing this comprehensive sensing framework, the availability of depth information is essential for enabling autonomous aerial vehicles to perceive and navigate around obstacles. In this work, we propose a method for estimating the distance information of a detected aerial object in real time using only the input of a monocular camera. In order to train our deep learning components for the object detection, tracking and depth estimation tasks we utilize the Amazon Airborne Object Tracking (AOT) Dataset. In contrast to previous approaches that integrate the depth estimation module into the object detector, our method formulates the problem as image-to-image translation. We employ a separate lightweight encoder-decoder network for efficient and robust depth estimation. In a nutshell, the object detection module identifies and localizes obstacles, conveying this information to both the tracking module for monitoring obstacle movement and the depth estimation module for calculating distances. Our approach is evaluated on the Airborne Object Tracking (AOT) dataset which is the largest (to the best of our knowledge) air-to-air airborne object dataset.
Read more5/17/2024
0
Visual Geo-Localization from images
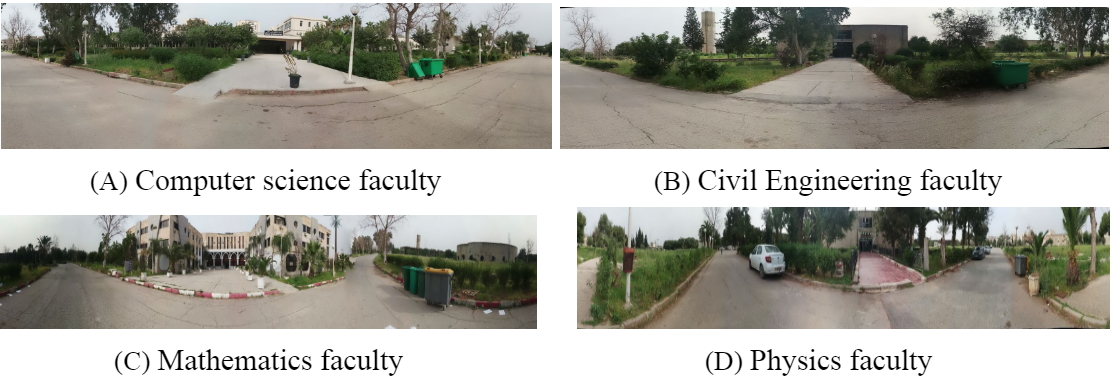
Rania Saoud, Slimane Larabi
This paper presents a visual geo-localization system capable of determining the geographic locations of places (buildings and road intersections) from images without relying on GPS data. Our approach integrates three primary methods: Scale-Invariant Feature Transform (SIFT) for place recognition, traditional image processing for identifying road junction types, and deep learning using the VGG16 model for classifying road junctions. The most effective techniques have been integrated into an offline mobile application, enhancing accessibility for users requiring reliable location information in GPS-denied environments.
Read more7/23/2024