Collaborative Planar Pushing of Polytopic Objects with Multiple Robots in Complex Scenes

0
📈
Sign in to get full access
Overview
- This research paper explores the use of pushing as a simple yet effective skill for robots to interact with and change their environment.
- The paper focuses on controlling a team of mobile robots to collaboratively push objects within complex, obstacle-filled environments.
- Key challenges addressed include hybrid switching between different contact modes, under-actuation due to constrained contact forces, and robustness to motion and actuation uncertainties.
Plain English Explanation
Robots can be very useful for interacting with and changing the world around them. One simple but powerful skill for robots is pushing. Pushing as a manipulation primitive can be particularly beneficial for low-cost mobile robots without complex manipulators.
This research looks at how to control a group of mobile robots to work together and push objects through cluttered environments with obstacles. This involves some tricky challenges, like the robots needing to smoothly switch between different ways of making contact with the object, and the fact that the robots' pushing forces are limited.
The researchers propose a method that:
- Figures out all the different ways the robots can push the object safely, based on analyzing the object's shape and the number of robots.
- Designs a smart search algorithm to plan the robots' navigation path and choose the best pushing mode at each step.
- Uses a control system to precisely coordinate the robots' pushing motions in real-time, adapting to uncertainties.
Overall, this research tackles the general problem of getting teams of simple mobile robots to collaborate and manipulate objects in complex real-world environments, which could be very useful for many applications.
Technical Explanation
This paper presents a framework for controlling a team of mobile robots to collaboratively push polytopic objects through obstacle-filled environments. It addresses several key challenges associated with contact-rich manipulation tasks.
First, the method generates a set of feasible pushing modes based on a multi-directional quasi-static analysis of the object and robots' capabilities. This allows for planning robust open-loop pushing maneuvers.
Next, a hierarchical hybrid search algorithm is designed to decompose the navigation path into optimal sequences of pushing modes. This combines learning-based articulated object manipulation with multi-robot planning for filming groups of actors.
Finally, a nonlinear model predictive controller is employed to track the desired pushing velocities for each robot in real-time, accounting for motion and actuation uncertainties. This builds on prior work in precise object placement using force-feedback.
The proposed framework is shown to be robust and effective through high-fidelity simulations and hardware experiments, including optimal multilayered motion planning for multiple differential-drive robots.
Critical Analysis
The paper presents a comprehensive solution to the problem of collaborative object pushing by mobile robot teams. However, it does make some limiting assumptions, such as requiring the objects to be polytopic in shape.
Additionally, the experiments were conducted in simulation and on a relatively small scale. Further research would be needed to validate the approach's performance and robustness in larger, more complex real-world environments with varied object shapes and robot capabilities.
The control framework also relies on accurate state estimation and modeling of the robot-object interactions. Sensitivity to modeling errors or sensing noise could be an area for further investigation and improvement.
Overall, this research represents a significant step forward in enabling simple mobile robots to work together and manipulate objects in challenging settings. With further development and real-world testing, the techniques presented here could find valuable applications in logistics, warehouse automation, and other domains.
Conclusion
This paper explores the use of pushing as a manipulation primitive for teams of mobile robots operating in cluttered environments. The proposed framework addresses key challenges like hybrid contact mode switching and under-actuation through a combination of quasi-static analysis, hierarchical path planning, and model predictive control.
While the approach has some limitations, it demonstrates the potential for simple robots to collaborate and change their surroundings in sophisticated ways. With further refinement and validation, the techniques developed in this research could contribute to more versatile, affordable robotic systems for a variety of real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
📈
0
Collaborative Planar Pushing of Polytopic Objects with Multiple Robots in Complex Scenes
Zili Tang, Yuming Feng, Meng Guo
Pushing is a simple yet effective skill for robots to interact with and further change the environment. Related work has been mostly focused on utilizing it as a non-prehensile manipulation primitive for a robotic manipulator. However, it can also be beneficial for low-cost mobile robots that are not equipped with a manipulator. This work tackles the general problem of controlling a team of mobile robots to push collaboratively polytopic objects within complex obstacle-cluttered environments. It incorporates several characteristic challenges for contact-rich tasks such as the hybrid switching among different contact modes and under-actuation due to constrained contact forces. The proposed method is based on hybrid optimization over a sequence of possible modes and the associated pushing forces, where (i) a set of sufficient modes is generated with a multi-directional feasibility estimation, based on quasi-static analyses for general objects and any number of robots; (ii) a hierarchical hybrid search algorithm is designed to iteratively decompose the navigation path via arc segments and select the optimal parameterized mode; and (iii) a nonlinear model predictive controller is proposed to track the desired pushing velocities adaptively online for each robot. The proposed framework is complete under mild assumptions. Its efficiency and effectiveness are validated in high-fidelity simulations and hardware experiments. Robustness to motion and actuation uncertainties is also demonstrated.
Read more6/4/2024

0
Planning for Robust Open-loop Pushing: Exploiting Quasi-static Belief Dynamics and Contact-informed Optimization
Julius Jankowski, Lara Brudermuller, Nick Hawes, Sylvain Calinon
Non-prehensile manipulation such as pushing is typically subject to uncertain, non-smooth dynamics. However, modeling the uncertainty of the dynamics typically results in intractable belief dynamics, making data-efficient planning under uncertainty difficult. This article focuses on the problem of efficiently generating robust open-loop pushing plans. First, we investigate how the belief over object configurations propagates through quasi-static contact dynamics. We exploit the simplified dynamics to predict the variance of the object configuration without sampling from a perturbation distribution. In a sampling-based trajectory optimization algorithm, the gain of the variance is constrained in order to enforce robustness of the plan. Second, we propose an informed trajectory sampling mechanism for drawing robot trajectories that are likely to make contact with the object. This sampling mechanism is shown to significantly improve chances of finding robust solutions, especially when making-and-breaking contacts is required. We demonstrate that the proposed approach is able to synthesize bi-manual pushing trajectories, resulting in successful long-horizon pushing maneuvers without exteroceptive feedback such as vision or tactile feedback. We furthermore deploy the proposed approach in a model-predictive control scheme, demonstrating additional robustness against unmodeled perturbations.
Read more6/28/2024
🤷
0
New!ReloPush: Multi-object Rearrangement in Confined Spaces with a Nonholonomic Mobile Robot Pusher
Jeeho Ahn, Christoforos Mavrogiannis
We focus on the problem of rearranging a set of objects within a confined space with a nonholonomically constrained mobile robot pusher. This problem is relevant to many real-world domains, including warehouse automation and construction. These domains give rise to instances involving a combination of geometric, kinematic, and physics constraints, which make planning particularly challenging. Prior work often makes simplifying assumptions like the use of holonomic mobile robots or dexterous manipulators capable of unconstrained overhand reaching. Our key insight is we can empower even a constrained mobile pusher to tackle complex rearrangement tasks by enabling it to modify the environment to its favor in a constraint-aware fashion. To this end, we describe a Push-Traversability graph, whose vertices represent poses that the pusher can push objects from and edges represent optimal, kinematically feasible, and stable push-rearrangements of objects. Based on this graph, we develop ReloPush, a planning framework that leverages Dubins curves and standard graph search techniques to generate an efficient sequence of object rearrangements to be executed by the pusher. We evaluate ReloPush across a series of challenging scenarios, involving the rearrangement of densely cluttered workspaces with up to eight objects by a 1tenth mobile robot pusher. ReloPush exhibits orders of magnitude faster runtimes and significantly more robust execution in the real world, evidenced in lower execution times and fewer losses of object contact, compared to two baselines lacking our proposed graph structure.
Read more9/30/2024
0
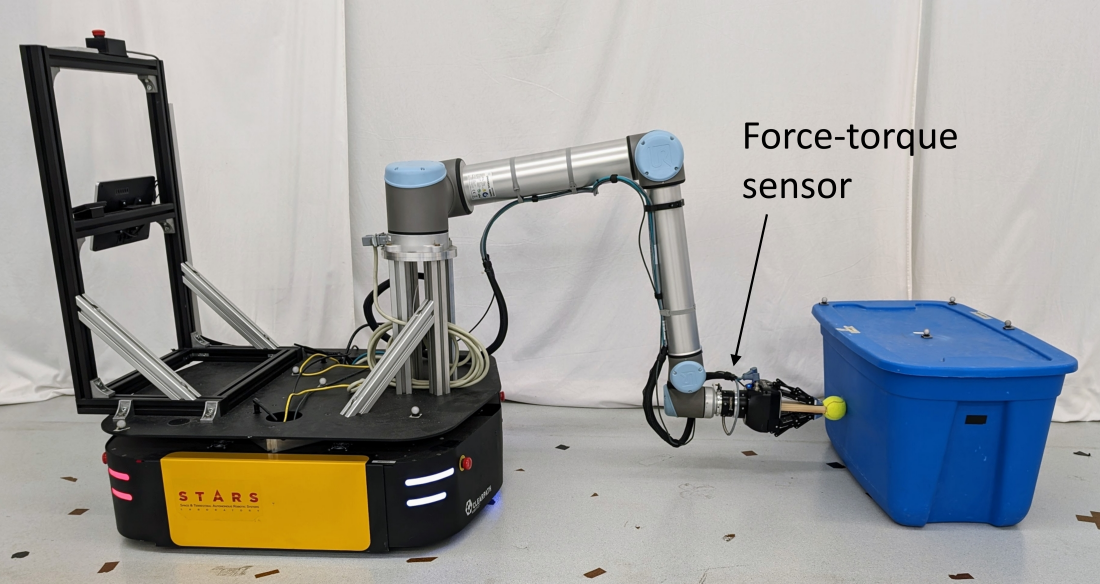
Force Push: Robust Single-Point Pushing with Force Feedback
Adam Heins, Angela P. Schoellig
We present a controller for quasistatic robotic planar pushing with single-point contact using only force feedback to sense the pushed object. We consider an omnidirectional mobile robot pushing an object (the slider) along a given path, where the robot is equipped with a force-torque sensor to measure the force at the contact point with the slider. The geometric, inertial, and frictional parameters of the slider are not known to the controller, nor are measurements of the slider's pose. We assume that the robot can be localized so that the global position of the contact point is always known and that the approximate initial position of the slider is provided. Simulations and real-world experiments show that our controller yields pushes that are robust to a wide range of slider parameters and state perturbations along both straight and curved paths. Furthermore, we use an admittance controller to adjust the pushing velocity based on the measured force when the slider contacts obstacles like walls.
Read more6/19/2024