FlowBot++: Learning Generalized Articulated Objects Manipulation via Articulation Projection

0

Sign in to get full access
Overview
- This paper introduces FlowBot++, a framework for learning generalized manipulation of articulated objects.
- The key idea is to learn a latent representation of object articulation using "articulation projection" and use this to train a reinforcement learning agent to manipulate the objects.
- The approach is demonstrated on a range of articulated objects, showing improved performance compared to prior methods.
Plain English Explanation
The paper describes a new system called FlowBot++ that allows robots to learn how to manipulate a wide variety of articulated objects. Articulated objects are things with movable parts, like doors, drawers, or robotic arms.
The core innovation is a technique called "articulation projection" that allows the robot to learn an internal representation of how an object's parts are connected and move relative to each other. This latent representation is then used to train a reinforcement learning agent - a type of AI system that learns by trial-and-error - to perform manipulation tasks like opening a drawer or swinging a door.
By learning this articulation projection, the robot is able to generalize its manipulation skills to new objects with different shapes and structures, rather than having to learn each object from scratch. The paper demonstrates this on a range of articulated objects, showing the robot can perform tasks better than previous methods.
The key benefit of this approach is that it allows robots to more flexibly and intelligently interact with the real world, which has many articulated objects. Rather than being limited to a fixed set of objects it was trained on, the robot can adapt its skills to new objects it encounters. This could enable more capable and versatile robots for tasks like home assistance, manufacturing, or exploratory robotics.
Technical Explanation
The core technical contribution of this paper is the FlowBot++ framework for learning generalized articulated object manipulation. The key components are:
-
Articulation Projection: The system learns a latent representation of an object's articulation by observing how its parts move relative to each other. This is done through a neural network module that projects the 3D object geometry and observed motion into a low-dimensional "articulation code".
-
Reinforcement Learning: A separate reinforcement learning agent is trained to manipulate the object using the learned articulation representation. The agent receives rewards for successfully completing manipulation tasks and learns a policy to control the object.
-
Generalization: By decoupling the articulation learning and manipulation learning, the approach can generalize to new articulated objects beyond what the agent was trained on. The articulation projection module allows the reinforcement learning agent to adapt its skills.
The paper evaluates this approach on a range of articulated objects, including doors, drawers, and robotic arms. Compared to prior methods that required object-specific training, FlowBot++ demonstrates improved performance on manipulation tasks, highlighting its ability to generalize.
The paper also discusses how the articulation projection can be learned through interaction, similar to how humans develop an understanding of object structure through exploration. This interactive learning approach could further enhance the robot's ability to adapt to novel objects.
Critical Analysis
The FlowBot++ framework represents an interesting step towards more flexible and generalizable manipulation capabilities for robots. The key idea of learning a latent representation of articulation is a clever way to decouple object-specific knowledge from the reinforcement learning agent.
However, the paper does acknowledge some limitations. The articulation projection currently assumes known object geometry, which may not always be available in real-world settings. Extending the approach to learn articulation from sensor data alone would be an important next step.
Additionally, the paper focuses on basic manipulation tasks like opening and closing. Applying the framework to more complex, multi-step interactions with articulated objects remains an open challenge. Integrating FlowBot++ with higher-level planning and reasoning capabilities could further enhance its versatility.
It would also be valuable to better understand the robot's internal "understanding" of articulation. The paper provides some visualizations, but a more detailed analysis of the articulation representation and how it enables generalization could yield additional insights.
Overall, the FlowBot++ framework represents a promising direction for advancing robotic manipulation capabilities. By decoupling articulation learning from task-specific control, it offers a path towards more flexible and reusable robotic skills. Continued research in this area could lead to significant improvements in the versatility of robotic systems for assisting humans.
Conclusion
This paper introduces the FlowBot++ framework, which enables robots to learn generalized manipulation of articulated objects. The key innovation is a technique called "articulation projection" that allows the robot to learn a latent representation of an object's movable parts and how they are connected.
By decoupling this articulation understanding from the manipulation policy, FlowBot++ is able to generalize its skills to new objects beyond what it was trained on. The paper demonstrates improved performance on a range of articulated object manipulation tasks compared to prior methods.
This work represents an important step towards more flexible and adaptable robotic manipulation capabilities. By learning to understand and interact with the underlying structure of objects, robots can move beyond rigid, object-specific skills towards a more generalized understanding of the physical world. Further research in this direction could lead to significant advances in the versatility and usefulness of robotic systems in real-world applications.
This summary was produced with help from an AI and may contain inaccuracies - check out the links to read the original source documents!
Related Papers
0
FlowBot++: Learning Generalized Articulated Objects Manipulation via Articulation Projection
Harry Zhang, Ben Eisner, David Held
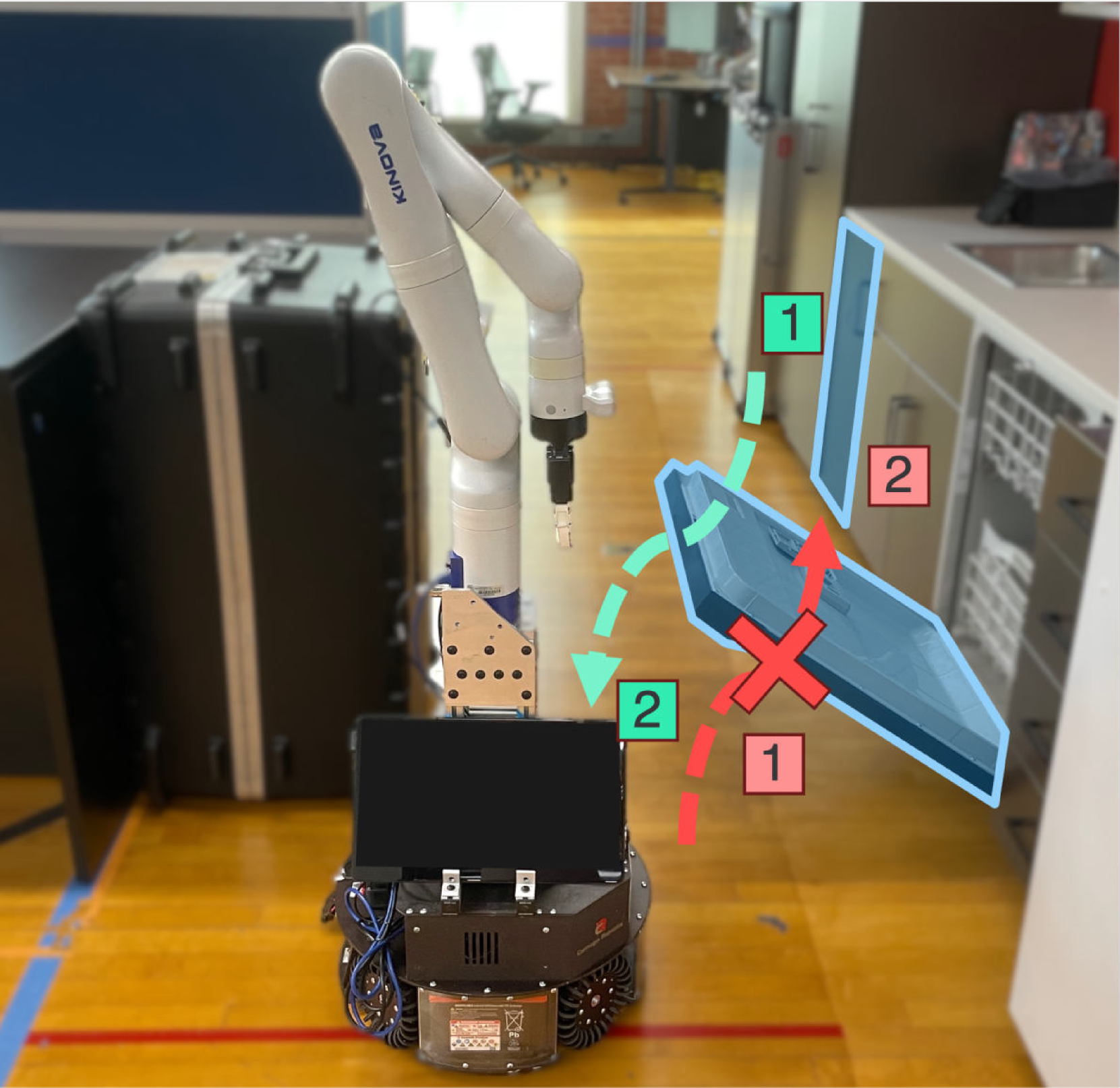
Understanding and manipulating articulated objects, such as doors and drawers, is crucial for robots operating in human environments. We wish to develop a system that can learn to articulate novel objects with no prior interaction, after training on other articulated objects. Previous approaches for articulated object manipulation rely on either modular methods which are brittle or end-to-end methods, which lack generalizability. This paper presents FlowBot++, a deep 3D vision-based robotic system that predicts dense per-point motion and dense articulation parameters of articulated objects to assist in downstream manipulation tasks. FlowBot++ introduces a novel per-point representation of the articulated motion and articulation parameters that are combined to produce a more accurate estimate than either method on their own. Simulated experiments on the PartNet-Mobility dataset validate the performance of our system in articulating a wide range of objects, while real-world experiments on real objects' point clouds and a Sawyer robot demonstrate the generalizability and feasibility of our system in real-world scenarios.
Read more5/3/2024
🎯
0
Part-Guided 3D RL for Sim2Real Articulated Object Manipulation
Pengwei Xie, Rui Chen, Siang Chen, Yuzhe Qin, Fanbo Xiang, Tianyu Sun, Jing Xu, Guijin Wang, Hao Su
Manipulating unseen articulated objects through visual feedback is a critical but challenging task for real robots. Existing learning-based solutions mainly focus on visual affordance learning or other pre-trained visual models to guide manipulation policies, which face challenges for novel instances in real-world scenarios. In this paper, we propose a novel part-guided 3D RL framework, which can learn to manipulate articulated objects without demonstrations. We combine the strengths of 2D segmentation and 3D RL to improve the efficiency of RL policy training. To improve the stability of the policy on real robots, we design a Frame-consistent Uncertainty-aware Sampling (FUS) strategy to get a condensed and hierarchical 3D representation. In addition, a single versatile RL policy can be trained on multiple articulated object manipulation tasks simultaneously in simulation and shows great generalizability to novel categories and instances. Experimental results demonstrate the effectiveness of our framework in both simulation and real-world settings. Our code is available at https://github.com/THU-VCLab/Part-Guided-3D-RL-for-Sim2Real-Articulated-Object-Manipulation.
Read more4/29/2024
0
KinScene: Model-Based Mobile Manipulation of Articulated Scenes
Cheng-Chun Hsu, Ben Abbatematteo, Zhenyu Jiang, Yuke Zhu, Roberto Mart'in-Mart'in, Joydeep Biswas
Sequentially interacting with articulated objects is crucial for a mobile manipulator to operate effectively in everyday environments. To enable long-horizon tasks involving articulated objects, this study explores building scene-level articulation models for indoor scenes through autonomous exploration. While previous research has studied mobile manipulation with articulated objects by considering object kinematic constraints, it primarily focuses on individual-object scenarios and lacks extension to a scene-level context for task-level planning. To manipulate multiple object parts sequentially, the robot needs to reason about the resultant motion of each part and anticipate its impact on future actions.We introduce ourtool{}, a full-stack approach for long-horizon manipulation tasks with articulated objects. The robot maps the scene, detects and physically interacts with articulated objects, collects observations, and infers the articulation properties. For sequential tasks, the robot plans a feasible series of object interactions based on the inferred articulation model. We demonstrate that our approach repeatably constructs accurate scene-level kinematic and geometric models, enabling long-horizon mobile manipulation in a real-world scene. Code and additional results are available at https://chengchunhsu.github.io/KinScene/
Read more9/26/2024

0
General Flow as Foundation Affordance for Scalable Robot Learning
Chengbo Yuan, Chuan Wen, Tong Zhang, Yang Gao
We address the challenge of acquiring real-world manipulation skills with a scalable framework. We hold the belief that identifying an appropriate prediction target capable of leveraging large-scale datasets is crucial for achieving efficient and universal learning. Therefore, we propose to utilize 3D flow, which represents the future trajectories of 3D points on objects of interest, as an ideal prediction target. To exploit scalable data resources, we turn our attention to human videos. We develop, for the first time, a language-conditioned 3D flow prediction model directly from large-scale RGBD human video datasets. Our predicted flow offers actionable guidance, thus facilitating zero-shot skill transfer in real-world scenarios. We deploy our method with a policy based on closed-loop flow prediction. Remarkably, without any in-domain finetuning, our method achieves an impressive 81% success rate in zero-shot human-to-robot skill transfer, covering 18 tasks in 6 scenes. Our framework features the following benefits: (1) scalability: leveraging cross-embodiment data resources; (2) wide application: multiple object categories, including rigid, articulated, and soft bodies; (3) stable skill transfer: providing actionable guidance with a small inference domain-gap. Code, data, and supplementary materials are available https://general-flow.github.io
Read more9/24/2024